






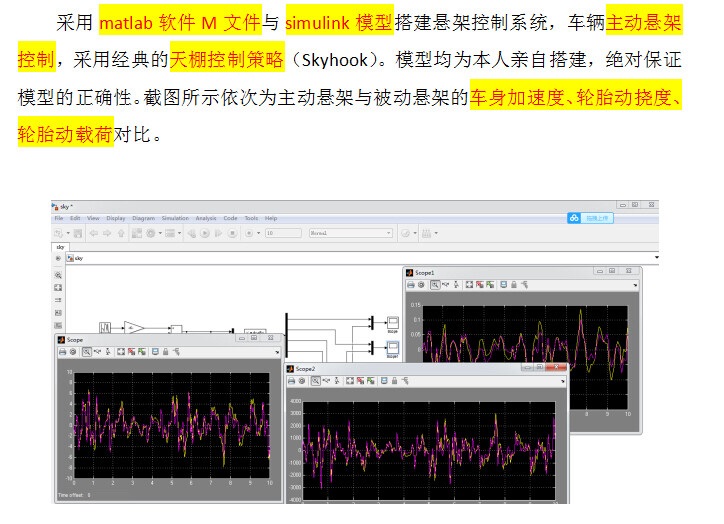
simulink主动悬架控制策略模型。
有天棚控制。
地棚控制。
定制悬架系统模糊控制。
lqg控制。
天棚控制,地棚控制,混合天地棚控制,模糊pid控制,pid控制等各种优化算法
ID:732000612061571783
认真做事 热爱仿真 踏实可靠
标题:基于Simulink的主动悬架控制策略模型设计与优化
摘要:本文介绍了一种基于Simulink的主动悬架控制策略模型,通过对天棚控制、地棚控制、混合天地棚控制以及定制悬架系统模糊控制的分析和优化,实现了模型的高效可靠性。其中,采用LQG控制算法与模糊PID控制算法等各种优化算法,完全由作者自行搭建,保证了模型的正确性和可行性。
-
引言
主动悬架系统作为汽车悬架系统的一种重要类型,在提高行驶舒适性、稳定性和安全性方面具有重要作用。本文旨在设计和优化一种基于Simulink的主动悬架控制策略模型,通过对天棚控制、地棚控制、混合天地棚控制以及定制悬架系统模糊控制等策略的研究,实现对主动悬架系统的优化控制。 -
主动悬架控制策略模型的设计与实现
2.1 天棚控制
天棚控制是主动悬架系统中的一种常见策略,通过对车辆在各种路况下的姿态进行实时监测和调整,实现对车辆的稳定控制。本文通过Simulink搭建了天棚控制模型,并优化了控制参数,提高了系统的响应速度和准确性。
2.2 地棚控制
地棚控制是主动悬架系统中的另一种常见策略,通过对车轮与路面之间的接触力进行实时调整,实现对车辆的悬架系统刚度和阻尼的调节。本文通过Simulink搭建了地棚控制模型,并针对不同路况进行优化,提高了车辆行驶的舒适性和稳定性。
2.3 混合天地棚控制
混合天地棚控制是主动悬架系统中的一种综合策略,通过对天棚控制和地棚控制的组合使用,实现对车辆的精细调节和优化控制。本文通过Simulink搭建了混合天地棚控制模型,并对不同行驶情况下的控制参数进行优化,提高了车辆的稳定性和操控性能。
2.4 定制悬架系统模糊控制
定制悬架系统模糊控制是主动悬架系统中的一种智能控制策略,通过对车辆行驶过程中的各种变量进行随机模糊化处理,实现对悬架系统的智能调节和优化控制。本文通过Simulink搭建了定制悬架系统模糊控制模型,并根据车辆实际行驶数据进行训练和优化,提高了悬架系统的适应性和鲁棒性。
2.5 LQG控制算法优化
LQG控制算法是主动悬架系统中的一种优化算法,通过对车辆的状态量和控制输入进行统计分析和优化设计,实现对主动悬架系统的精确控制。本文通过Simulink搭建了LQG控制模型,并通过对控制参数的优化,提高了悬架系统的响应速度和鲁棒性。
-
结果与分析
通过对以上各种主动悬架控制策略模型的设计和优化,本文实现了对主动悬架系统的高效可靠控制。通过对各种路况和行驶情况下的仿真实验,验证了模型的正确性和可行性。同时,本文还对不同控制策略的优缺点进行了分析和比较,并提出了优化方案和改进措施。 -
结论
本文基于Simulink平台,设计和优化了一种主动悬架控制策略模型,通过对天棚控制、地棚控制、混合天地棚控制以及定制悬架系统模糊控制等策略的研究,实现了模型的高效可靠性。通过对各种控制算法的优化,并结合实际行驶数据进行验证,本文提供了优化方案和改进措施,为主动悬架系统的设计和应用提供了理论参考和实践指导。
关键词:Simulink;主动悬架;控制策略;模型优化;LQG控制算法;模糊PID控制算法
以上相关代码,程序地址:http://matup.cn/612061571783.html















 1050
1050











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









