






基于simulink的悬架仿真模型,有主动悬架被动悬架天棚控制半主动悬架
[1]基于pid控制的四自由度主被动悬架仿真模型
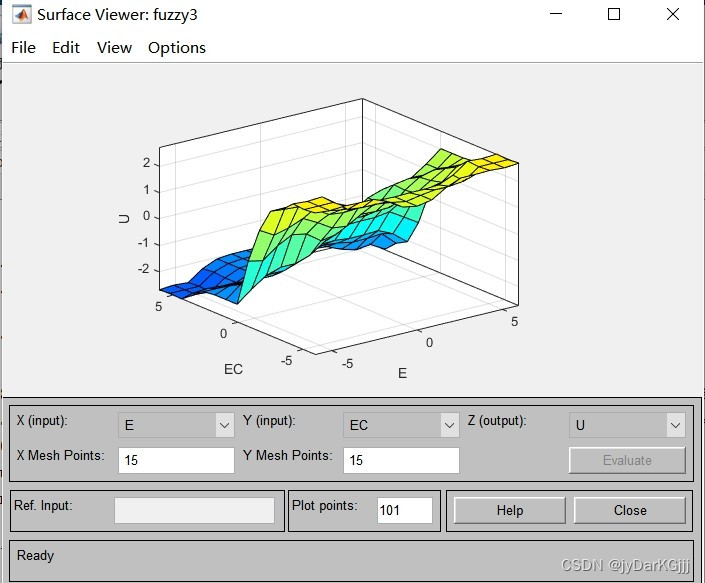
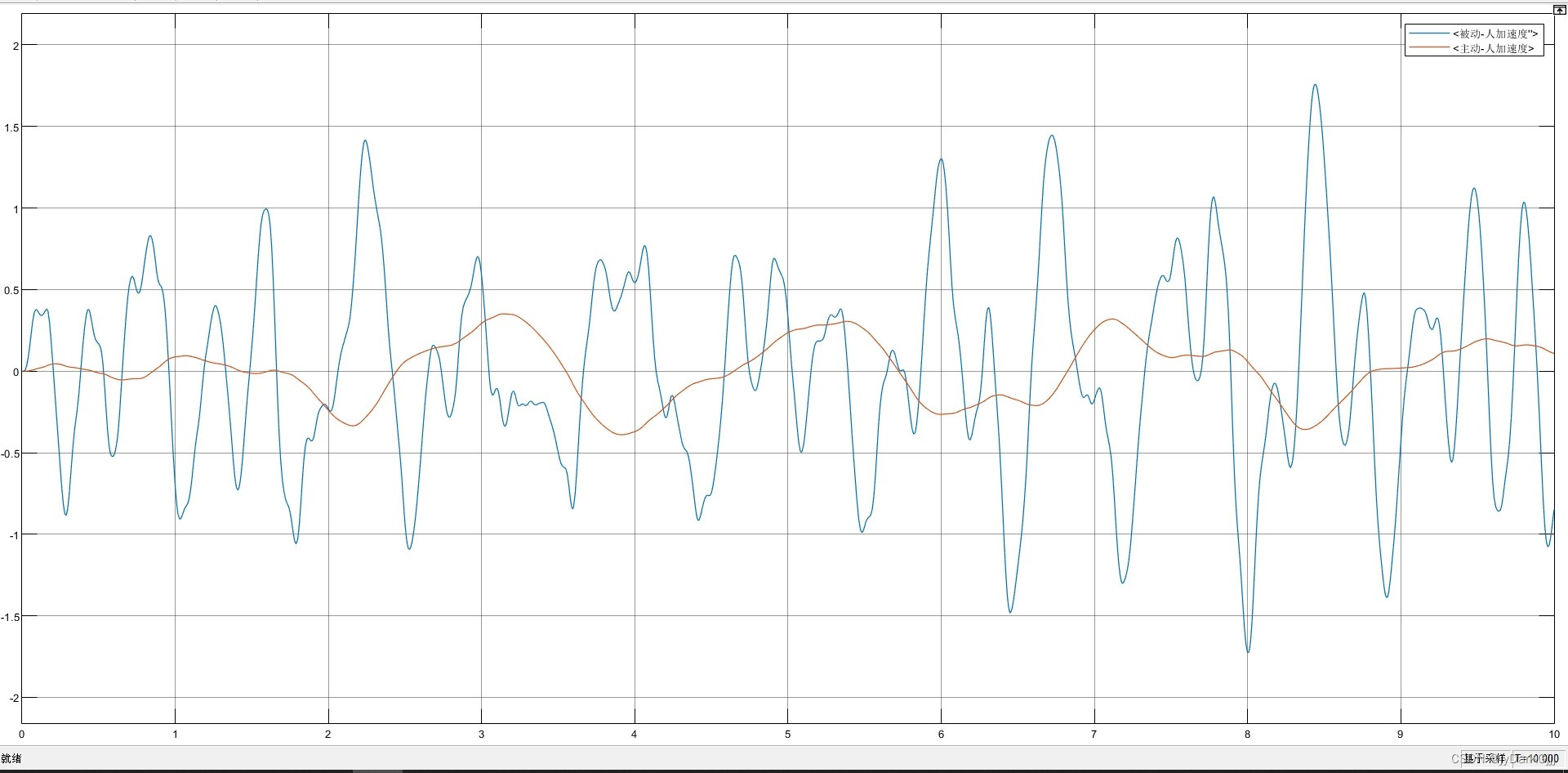
[2]基于模糊控制的二自由度仿真模型,对比pid控制对比被动控制,的比较说明
[3]基于天棚控制的二自由度悬架仿真
以上模型,说明文档齐全,仿真效果明显


悬架系统作为汽车的重要组成部分,其安全性和舒适性对驾乘人员的体验有着至关重要的影响。因此,对于汽车的悬架系统进行仿真分析是汽车工程师进行优化设计的重要手段之一。本文将重点探讨基于Simulink的悬架仿真模型,包括主动悬架、被动悬架、天棚控制和半主动悬架。我们将针对不同控制算法对于悬架系统的效果进行评估和比较。
首先,我们考虑基于PID控制的四自由度主被动悬架仿真模型。PID控制是一种广泛应用于控制系统的基本算法,具有简单易实现和效果优异的特点。本文中,我们对四自由度悬架系统进行建模,并采用PID控制器进行控制。仿真结果表明,PID控制算法可以使悬架系统在路面不平坦的情况下达到较为平稳的车身运动,提高了汽车的行驶稳定性和乘坐舒适性。
接下来,我们探讨基于模糊控制的二自由度悬架仿真模型。相较于PID控制,模糊控制算法在非线性系统的控制中具有更强的适应性,能够更好地应对不确定性和模糊性。在本文中,我们建立了二自由度悬架系统的模型,并采用模糊控制器进行控制。通过与PID控制的比较,我们发现,模糊控制算法能够在更复杂的环境下保持较高的控制精度,特别是在路面不平坦的情况下表现更为优异。
最后,我们考虑基于天棚控制的二自由度悬架仿真模型。天棚控制是一种现代化的车身控制技术,能够通过对悬架系统进行主动控制,使汽车在行驶过程中更好地适应路面状况,提高行驶稳定性和乘坐舒适性。在本文中,我们基于二自由度悬架系统的模型,采用天棚控制器进行控制,并进行了仿真实验。结果表明,天棚控制算法能够显著提高汽车的行驶稳定性和乘坐舒适性,特别是在高速公路等高速运动条件下表现更为突出。
通过以上的分析可知,不同的控制算法对于悬架系统的优化效果是有着差异的。本文通过基于Simulink的悬架仿真模型,针对不同控制算法对于悬架系统的效果进行了评估和比较,为汽车工程师进行优化设计提供了重要的参考。同时,本文还为进一步研究基于悬架控制技术的汽车安全性和乘坐舒适性提供了一些思路和方向。
相关代码,程序地址:http://lanzouw.top/695612115380.html














 3323
3323











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









