






 本文详细阐述了锁相环在电力系统并网控制中的作用,主要目的是确保注入电网的电流与电压同相位,提高功率因数。通过分析dq坐标系和锁相环控制原理,展示了不同初始条件和信号类型下如何实现电压矢量与dq轴同步,从而达到锁相目的。并探讨了两种坐标系模式下锁相结果的差异及其处理方法,强调了锁相环在确保系统效率和稳定性方面的重要性。
本文详细阐述了锁相环在电力系统并网控制中的作用,主要目的是确保注入电网的电流与电压同相位,提高功率因数。通过分析dq坐标系和锁相环控制原理,展示了不同初始条件和信号类型下如何实现电压矢量与dq轴同步,从而达到锁相目的。并探讨了两种坐标系模式下锁相结果的差异及其处理方法,强调了锁相环在确保系统效率和稳定性方面的重要性。
首先明白锁相环的目的,我们通常在并网控制时,比如并网逆变器,是想往电网里送电的,注入的是正弦电流信号; 并网时刻通常作为电流的过零时刻,但因为并网时刻是随机的,所以此时电网电压不一定是过零时刻,如果直接并网,注入电流会和电网电压有相位差,这样功率因素就不是1,电流利用率低,不能完全转化成有功,所以要利用锁相环技术,先得到和电网电压相同的角度信号,然后再将电流通过此角度注入,这样电流就和电网电压同相位了,功率因素接近于1,利用率较高。
同时PFC整流也是通过是输入电流和输入电压的相位一致,才能提高功率因素:
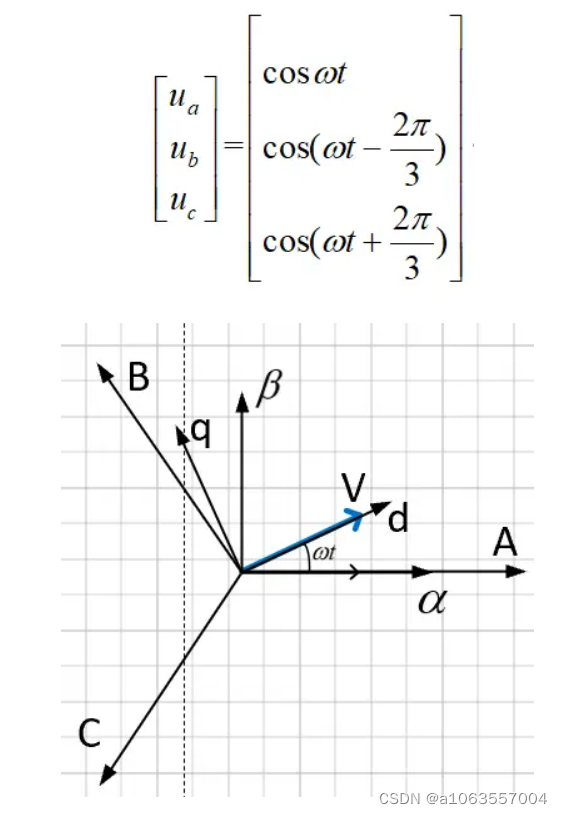
当dq旋转坐标系,以给定三相电压的角速度同步旋转时,如果给的是cos信号,且坐标系模式为d轴初始位置和a轴重合,那么d轴分量就为1,q轴分量为零,合成电压矢量和d轴重合,同步旋转
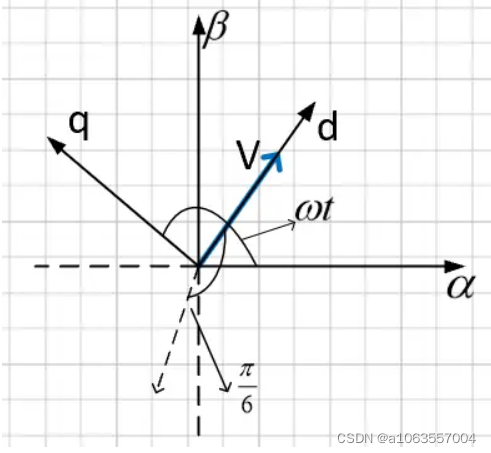
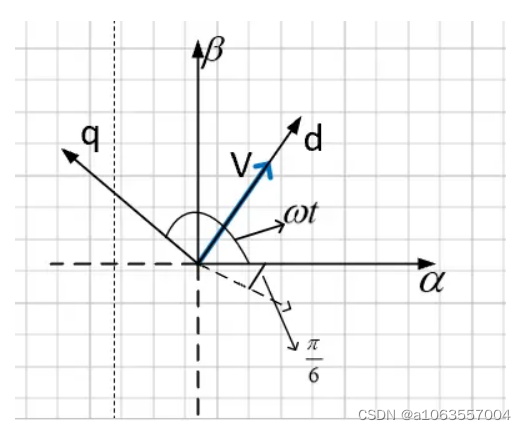
但是如果dq的旋转角度和给定电压的角度不同步(相当于并网时有个相位差),比如给定电压的角度为wt-pi/6, 而dq的旋转角度依然是wt,相当于在起始时刻dq的旋转角度和给定电压的角度差了pi/6的相位差,那么随着时间的变化就会始终差这样一个角度,如下:
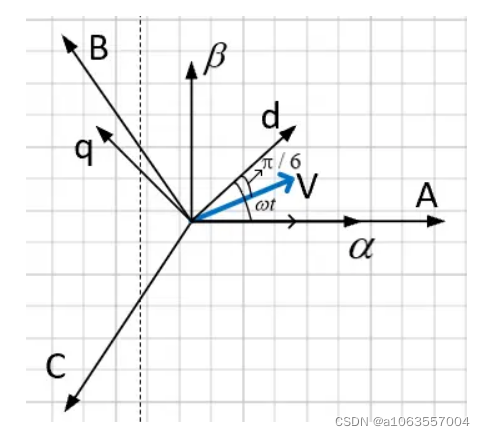
那么此时q轴和q轴上均有直流分量,而且dq轴的旋转角度也不再和给定电压的角度一致,而是差了pi/6, 而且是超前了pi/6,因为此时三相电压的合成矢量V滞后于d轴pi/6。 所以,如果我们能通过控制使得d轴的旋转速度减慢,(V矢量的旋转速度是不能改变的,因为他的速度是给定三相电压的角度速,相当于是电网电压的角速度)然后V和d轴的相对速度就从原来的不变 变成了现在的加快,这样随着时间的推移,V肯定会和d轴重合,q轴分量为0,稳定后如果V和d同步运行,那么此时d轴的旋转角度就是V矢量的旋转角度,即给定电压a相的角度。同理,如果初始位置,V超前于d一定的角度,比如pi/6, 那么通过一定的控制使得dq轴的旋转速度加快,经过一定时间后,dq轴就会追上V,然后保持同步运行。
基于以上分析,就引出了基于d轴定向的锁相环,控制框图如下所示:
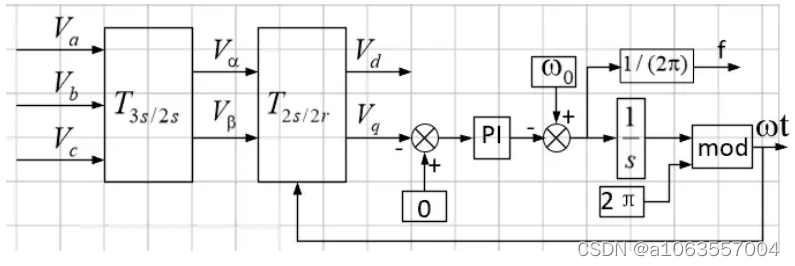
三相对称给定电压信号,经过clarke变换和park变换后,得到dq轴分量,如果初始时给定电压有相位信号,比如-pi/6, 而dq是从0度开始以wt的角度旋转的,所以通过上面分析可知,dq轴均有初始分量,且q轴分量为负,d轴分量为正,通过上面框图控制,Vq和0比较后信号输出为正值,经过PI控制后输出为正,再在w0的基础(前馈)上减去这个正值(w0是给定的基准角频率,就是电网角频率2*pi*50),得到的新角频率就会小于w0,然后经过积分后得到wt, wt mod2pi是把角度转换到周期0到2pi里面去,这里得到的角度就是锁相之后的输出角度,这个角度也是dq轴的旋转角度,因为它会反馈给dq轴旋转;得到w后除以2pi就是锁相之后的输出频率;然后因为调节后w小于w0,所以,dq轴就会转的慢,但是电压矢量的旋转速度是不变的,仍然是w,所以经过一段时间后,V追上d轴,和它重合,可能会经过一些震荡后稳定在d轴,和d同步旋转,那么此时的旋转角度,即输出角度就是电网电压的角度,就达到我们的目的。
下面均以起始角度相差pi/6,即电网a相的角度为wt-pi/6为例,对两种给定电压信号:cos sin,和两种旋转坐标系模式:d轴初始位置和a轴重合 d轴初始位置滞后a轴90度,共4种情况,进行锁相结果的分析和说明。
给定两种信号如下:
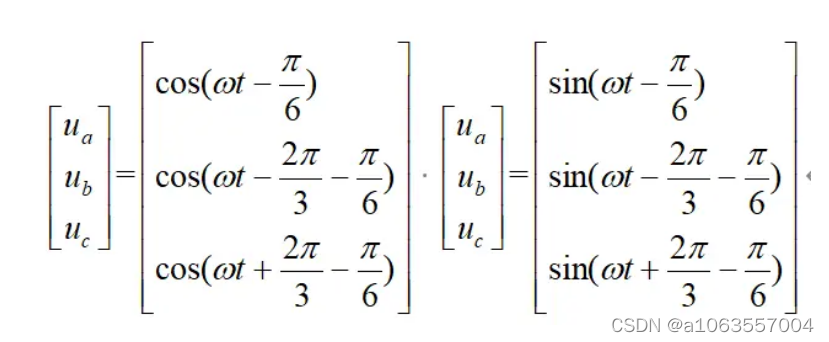
故意给了个初始角度差,是模拟并网时刻有个角度差,也可以是其他角度。这样有明显的锁相效果。
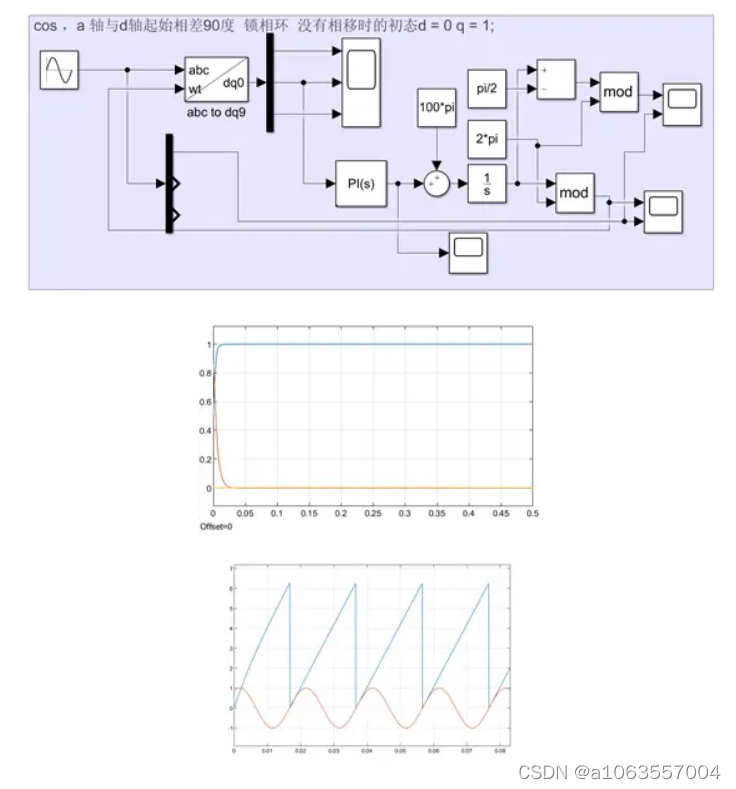
模式一:
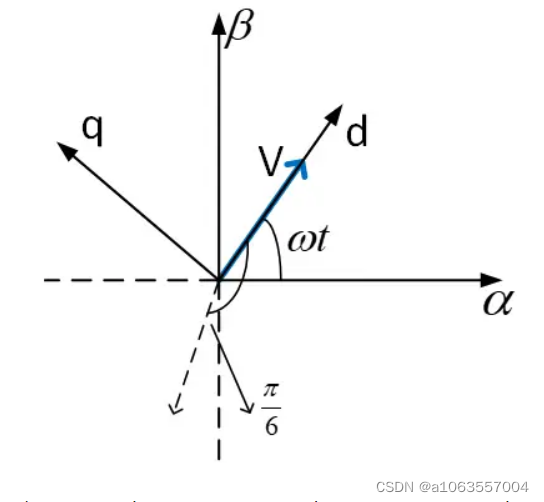
输入是cos信号,d初始时刻与a轴重合,正常情况下d = 1,q = 0; 但是有了角度差后,初始时刻位置如下:
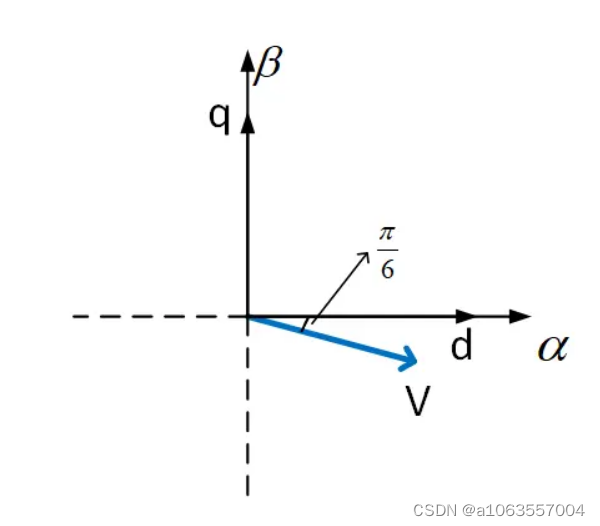
上图V就代表要锁的合成矢量,经过上面分析,未滞后30度时,初始矢量d轴分量为1,q轴分量为0,所以V应该和d轴重合,但是并网时角度初始值滞后30度,所以初始时在我们看来V在d轴后面30度,如果不进行锁相就会把这个初始位置当做电网的过零点时刻,这样会和实际电网始终差这么一个角度, 需要通过锁相控制来抵消掉这初始的30度相位差,使得V和d轴重合,这样旋转坐标系旋转的角度就和原来电网的相角重合了,即输出角度就和给定电压角度一致了。 由模型图和向量图得初始时q为-sin30=-0.5,通过PI控制后经过基准频率输出角频率会小于314rad/s,所以旋转坐标系转的慢,但合成矢量的旋转速度一直是314rad/s, 所以矢量会慢慢的追上旋转坐标系,直到和d轴重合,如果控制不好,合成矢量会超过d轴,此时q轴分量为正,经比例积分调节后是输出频率增加,dq旋转加快,再追上d轴,震荡过后会稳定在d轴,锁相成功,假设稳定时的位置如下:
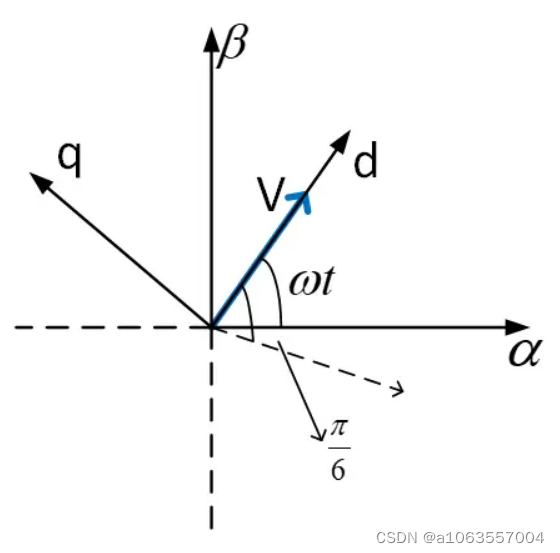
那么此时V旋转的角度和d轴旋转的角度的差值就是锁相作用的角度,可以看到d轴分量正好比V矢量慢了30度角,相当于在原来wt旋转角度的基础上滞后了30度,然后两者同步运行。d轴锁到的角度后的输出就是a轴正弦量对应的角度wt-pi/6,一般我们锁相的目的就是锁a相的角度。
上图蓝色dq坐标轴旋转的角度(累加出来的),红色的实际电网
模式二:
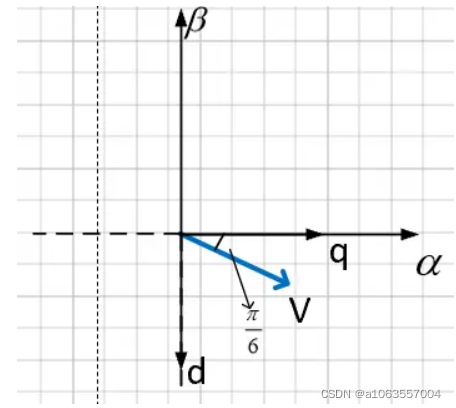
输入是sin信号,d初始时刻与a轴重合,正常情况下d = 0,q =-1;
可以看到此时,正常情况下d轴为0,如果锁相强制按照d轴定向,d=1, q=0, 这样即使锁相成功,这个相角也不会和正常情况一致,这样就会出现问题,但我们又习惯上按照d轴定向,所以仍然使用d轴定向,只不过最后的锁相角度要进一步处理,下面进行分析。
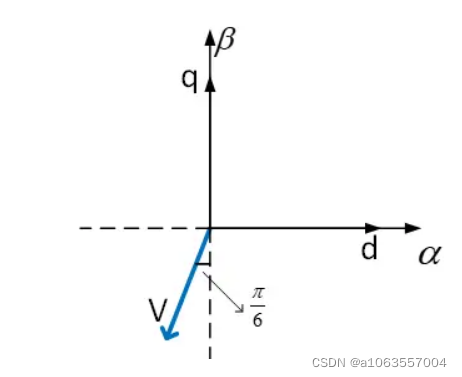
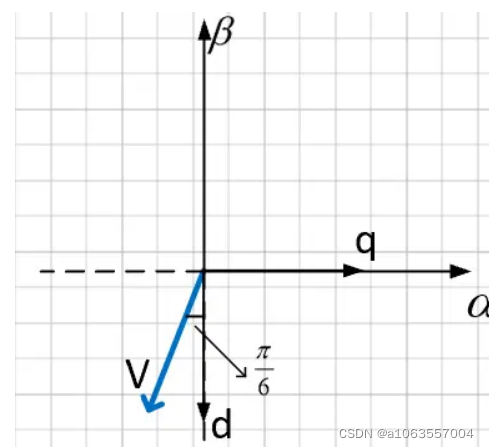
经过上面分析,未滞后30度时,初始矢量d轴分量为0,q轴分量为-1,所以应该和q轴负半轴重合,但是设置时滞后30度,所以应该在q轴负半轴后面30度, 但是dq坐标轴的位置还是不变的,d轴初始时和alpha轴以及a轴重合,初始角度还是代表wt, 然后进行锁相控制,由模型图和向量图得初始时q轴分量为-cos30=-0.866,进入积分环节后使得输出角频率会小于314rad/s,所以旋转坐标系转的慢,等着转速为314rad/s的矢量追上来,矢量V中间肯定会经过q轴的负半轴,所以中间q轴分量先从-0.866到-1再到0,直到和d轴重合,如果控制不好, 和上面类似,会震荡,过后会稳定在d轴,
锁相成功稳定后,假设稳定时的位置如下图
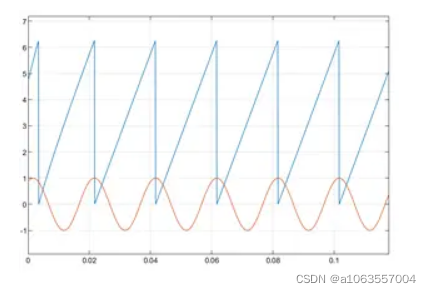
从图中可以看到V矢量转过的角度减去d轴转过的角度就是锁相作用的角度,可以看到,V矢量相对d轴,要比d轴快90+30度的角度,也就是说d轴在wt的基础上慢了120度,本来应该慢30度的,所以现在锁相输出为wt-pi/2-pi/6。虽然d轴和V矢量同步,但锁相结果滞后a相90度,所以为了达到原来的要求,要在原输出上加上90度,来抵消掉这个滞后,仿真结果也验证了这一点。
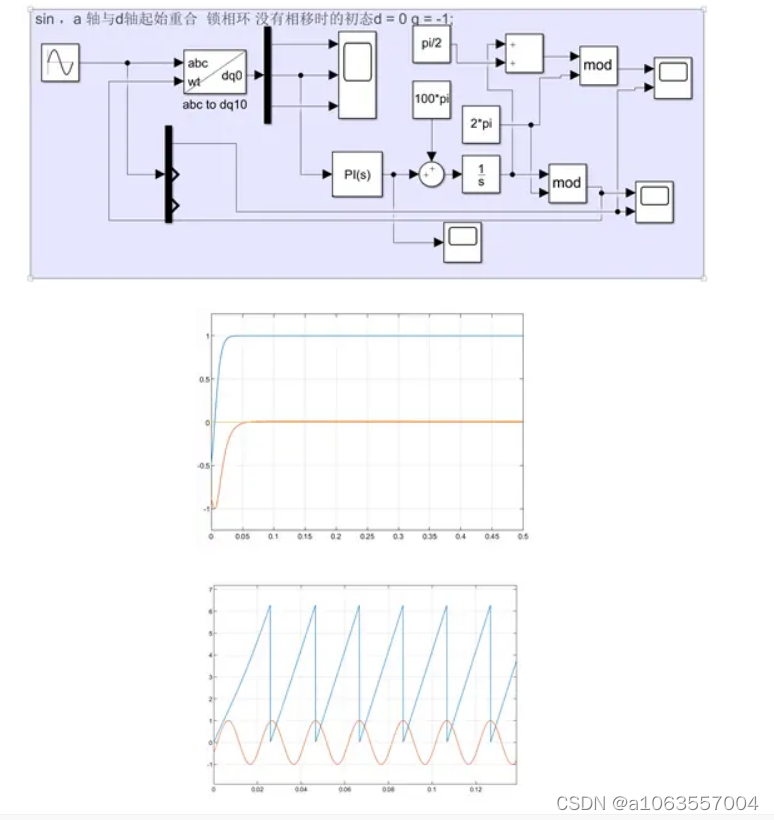
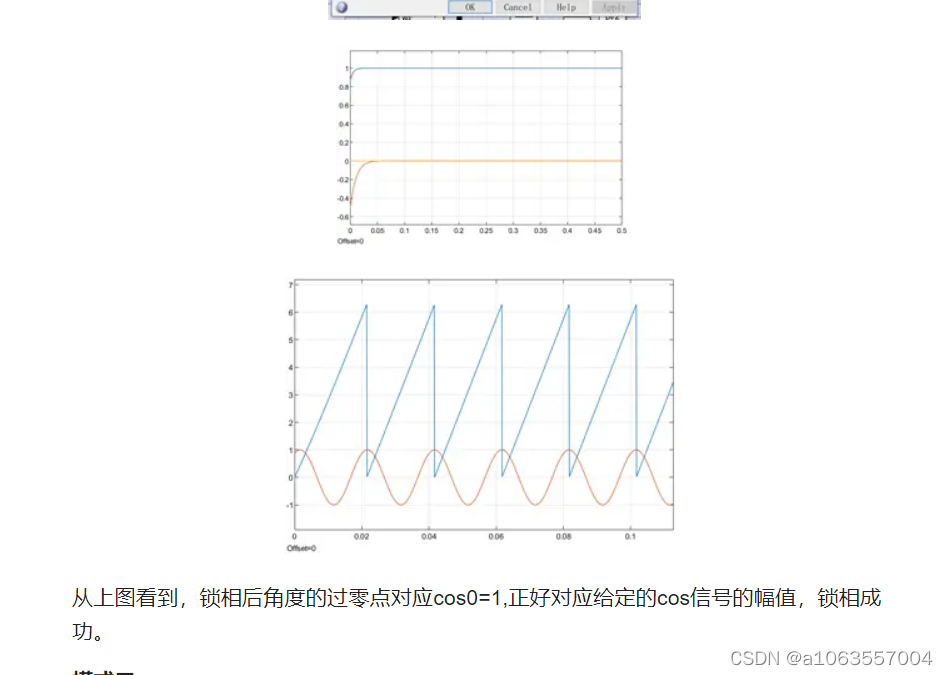
第二张图,d轴分量最后为1,和旋转矢量重合,q轴分量为0,而且q轴分量从-0.866到-1再到0,和原理分析一致,右边锁相过零点时正弦量为1,正确的结果应该是sin0=0,(个人感觉第三张图红色应该有问题,图中是超前而不是滞后)所以滞后了90度,加上90度的输出结果如下:
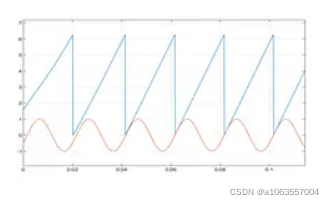
稳定后过零点时正弦量大小为0,正好对应sin0=0,和a相电压同步,锁相成功。由此对比也更能看出a轴与d轴重合的坐标系是cos型坐标系,即使给的是sin型电压,经过锁相后也会输出cos型相位。
除此之外,如果此时输出角度,不加90度,但通过cos输出,相当于cos(wt-90-30)=sin(wt-30),输出信号仍然是正确的,通过此就可以得到,不论给定信号是什么类型,如果采用d轴初始位置和a轴重合的模式进行变换,然后锁相,得到锁相角度后都通过cos输出,那么输出信号就是正确的,这也可以再次借助理解,此旋转坐标系模式为cos型的。
那么其他两种模式与此类似,这两种模式的参考输出角度是按q轴的旋转角度看的,
模式三:
输入是sin信号,d初始时刻滞后a轴90度,正常情况下d = 1,q =0;
初始位置如下:
稳定后如下:
稳定后q轴转过的角度,为坐标系的旋转角度,也是输出角度,可以看到,V转过的角度除了q轴转的以外,还多转了pi/6,弥补了初始时刻滞后的pi/6, 通过sin输出后锁相成功。 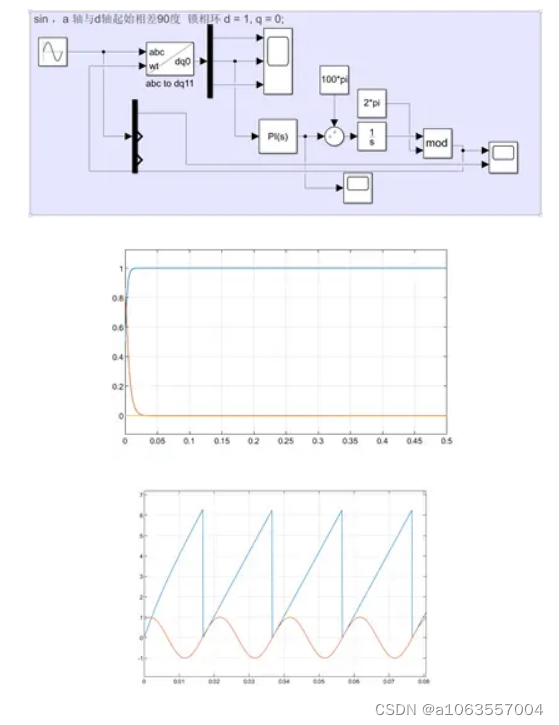
模式四:
输入是cos信号,d初始时刻滞后a轴90度,正常情况下d = 0,q =1;
初始位置,V滞后q轴pi/6:
稳定后,V按d轴定向,所以此时旋转角度要比V矢量快90度,要么减90度,然后通过cos输出,要么直接通过sin输出:
仿真如下:
可以看到,锁相后的角度过0点,对应的正弦信号值并不是cos0,而是0,相当于超前了90度(红色的正弦波我觉得其实是错的,图里是滞后了90度)。在这基础上减去90度输出如下:
通过输出结果可以看到锁相成功,如果只要输出正弦信号的话通过sin输出也可以,相当于sin(wt+pi/2-pi/6)=cos(wt-pi/6),和给定a轴 信号相同。
总结:
从上面的结果可以得到,之前分析的给定sin、cos信号的不同,d、q值就不同,但采用统一的锁相环后电压矢量会统一按照d轴定向,所以这样d轴始终是主轴,归一化后它上面的分量始终是1,q轴上的分量始终是零,所以有时即使采用不同的坐标系模式,只要把d轴作为主轴控制,最后结果也是正确,就是因为用了锁相环的原因;但角度还是要注意的。有可能相差90度角。 解决相差90度的方法有两种,一是在输出的角度上减去或加上90度,给它抵消掉,其次是,如果采用d轴和A轴重合的模式,可以均采用cos输出,如果采用d轴滞后于a轴90度的形式,可均采用sin输出,这样也是正确的。
所以为了方便,建议如果给定是cos信号(电网电压是cos型的),就用a与d同向的坐标系模式。如果给定是sin就用d初始时刻滞后于a轴90度的模式。这两种情况d轴本来就是主轴。

















 4262
4262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









