






 本文详细介绍了相位超前滞后判断、三相坐标系到两相静止坐标系的推导过程,包括Clarke、Park变换,以及它们在功率和幅值变换中的应用,重点讲解了等幅值和等功率变换的原理与矩阵表达。
本文详细介绍了相位超前滞后判断、三相坐标系到两相静止坐标系的推导过程,包括Clarke、Park变换,以及它们在功率和幅值变换中的应用,重点讲解了等幅值和等功率变换的原理与矩阵表达。
相量法基础知识铺垫
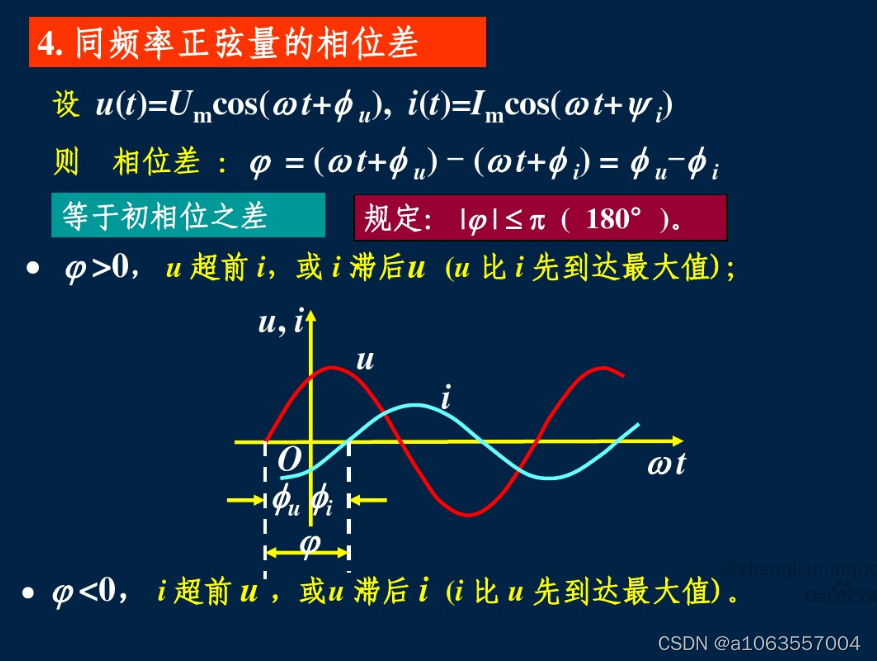
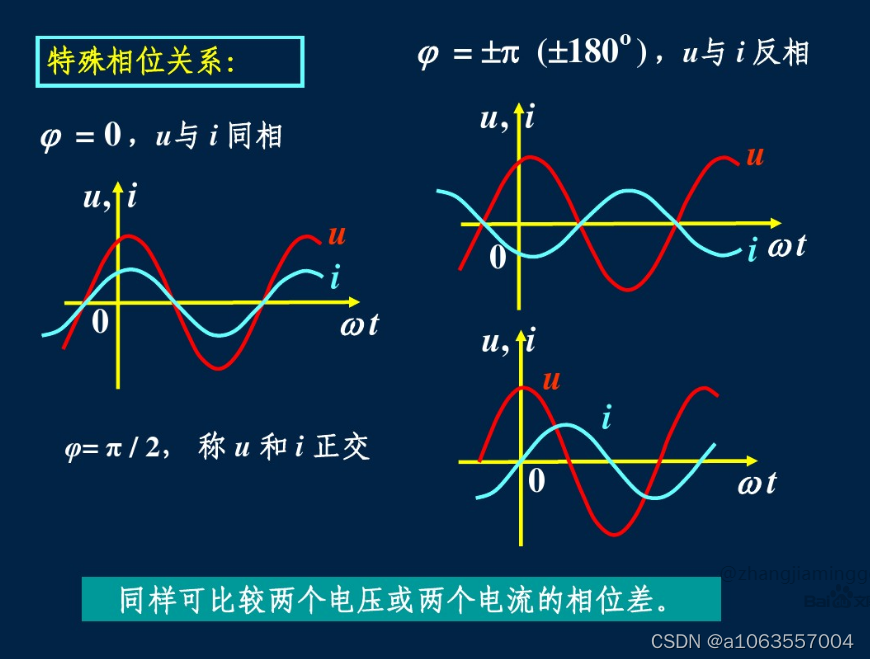
相位超前或滞后的判断1.坐标轴上在左边的是超前,在右边是滞后
2.函数式sin(ω+φ)为超前 sin(ω-φ)为滞后
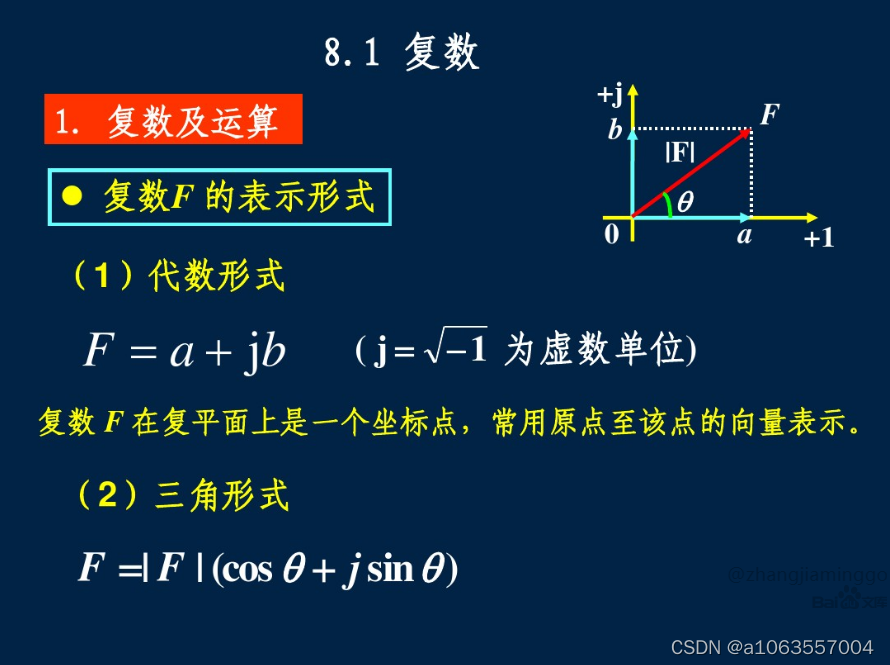
将三相坐标系上的三相电在Im Re坐标轴上表示所需要的基本知识
三相坐标系到两相静止坐标系推导:
以三相电压为例进行说明:
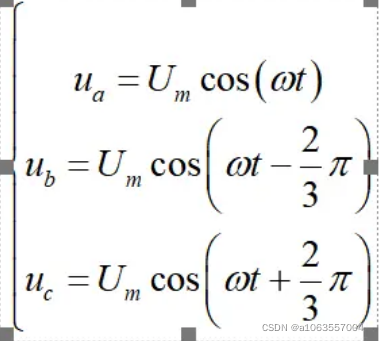
三相对称电压公式
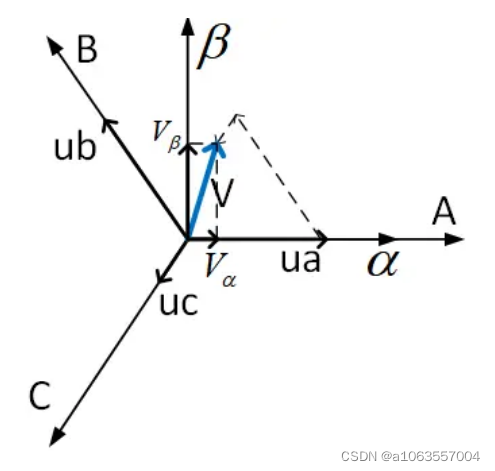
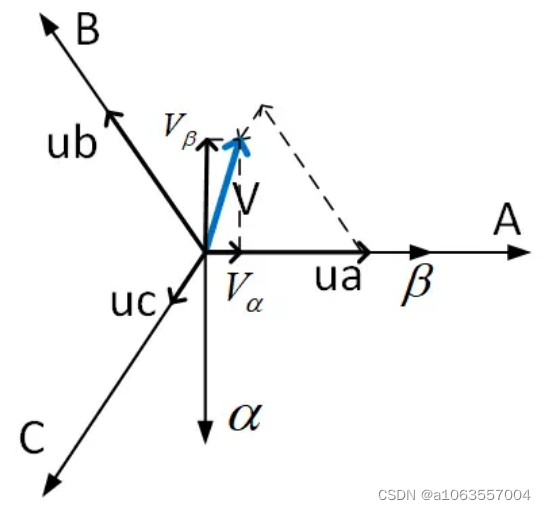
加到三相坐标系上就会合成相应的电压矢量,随着时间的变化该矢量逆时针旋转且幅值不变
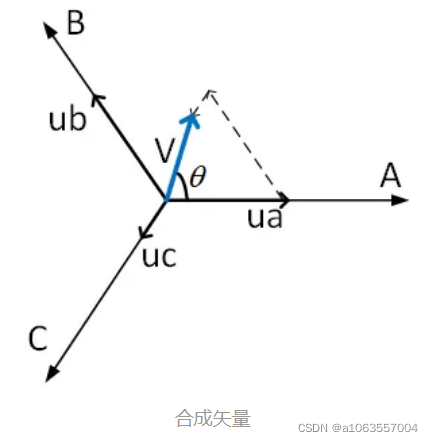
ABC是固定的三相坐标系,这里是按照逆时针模式,ABC三个坐标轴上的量在时间上差了120,且A轴上的量超前B轴上的量超前C轴上的量,正弦量随着时间的变化,合成矢量也在不断变换。这里的坐标系起源于电机的定转子位置。
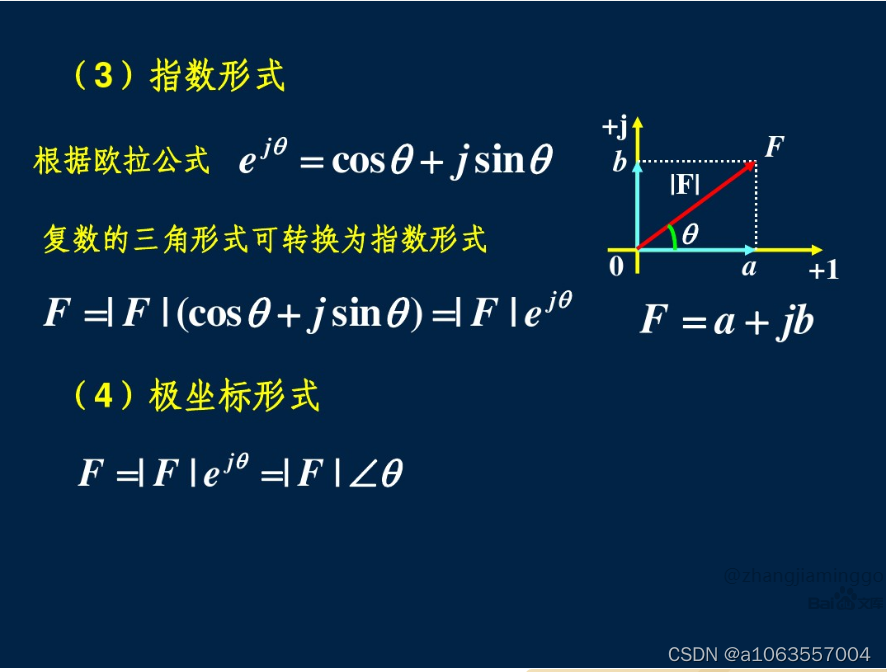
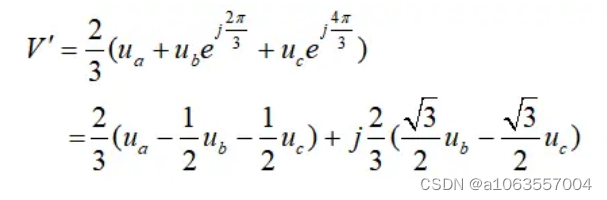
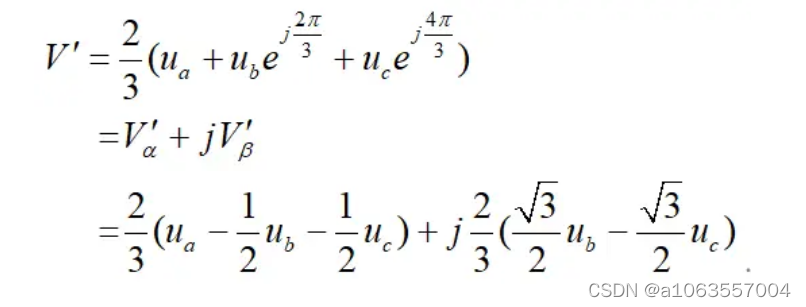
上式各相电压表示空间坐标系三个轴上的瞬时值,由欧拉公式:

则a,b,c三相坐标系合成矢量表达式如下:
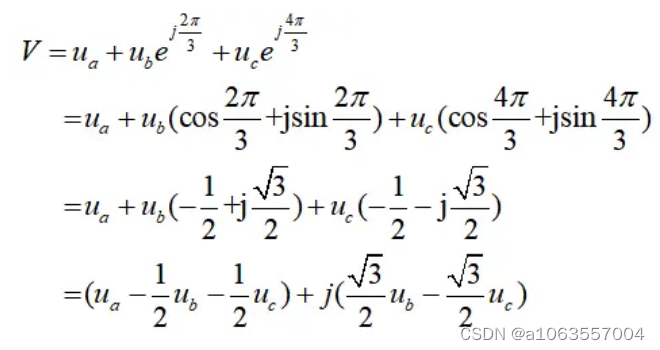
上面最后式子相当于一个在实轴上,一个在虚轴上
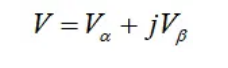
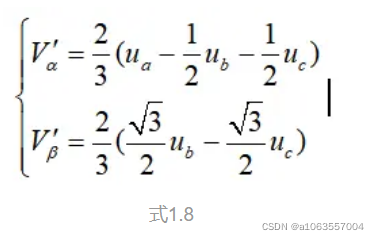
则有:
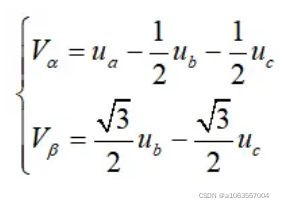
Valpha,Vbeta即为两相静止坐标系下的分量,对应坐标系如下图所示:
将三相电压代入经过运算可得:
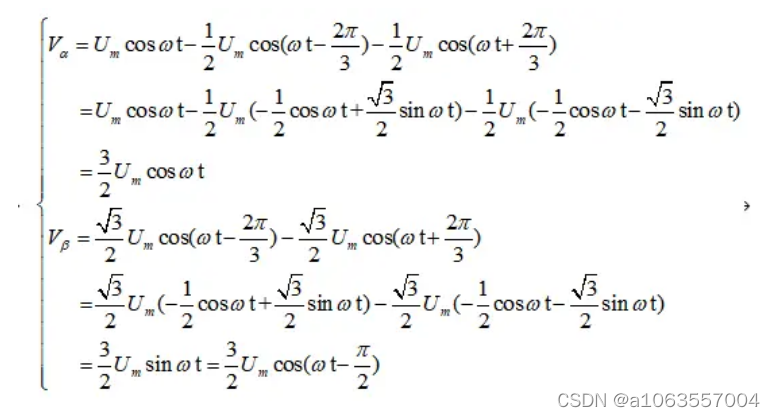
Valpha超前于Vbeta90度,两者幅值相等。但幅值为原来三相的电压的3/2倍,
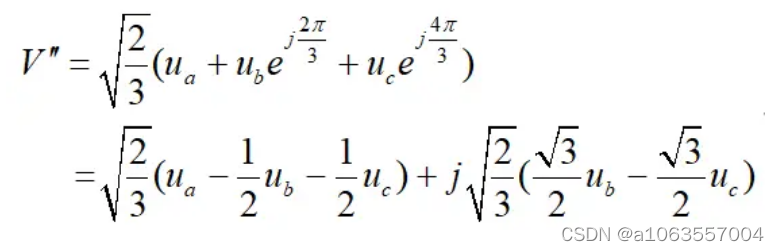
若采用等幅值变换,那么需要对原矢量表达式再乘以2/3,来抵消掉前面的3/2,如下所示:
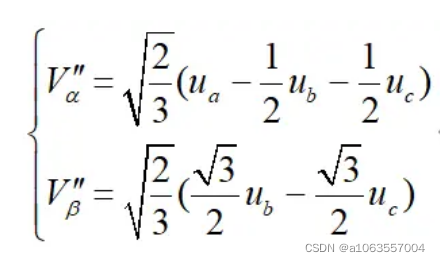
那么此时得到的新的alpha轴,beta轴分量的表达式如下
再将三相电压代入可得:
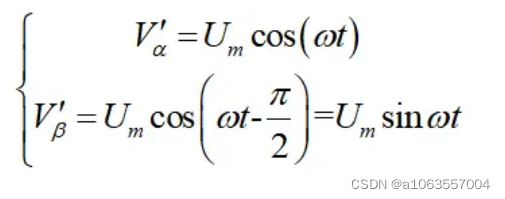
经过等幅值变换后的合成矢量的幅值为:
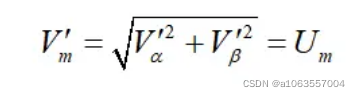
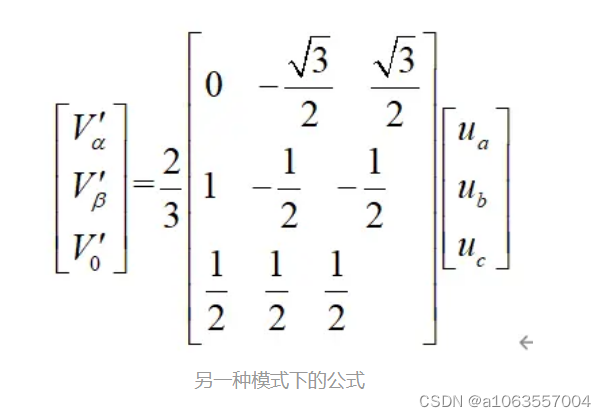
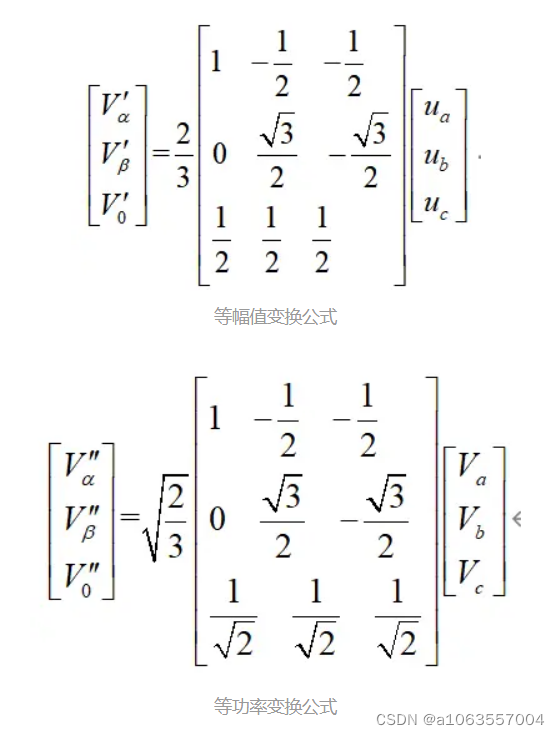
经过等幅值变换后合成矢量的幅值就是原来给定三相电压的幅值,这样变化前后,三相坐标系和两相静止坐标系上的正弦量幅值均相等,式1.8就是等幅值变化的方程,写成矩阵的形式如下:Clarke变换
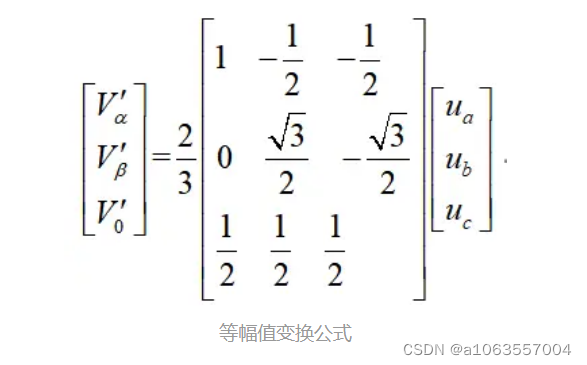
其中最后一行均为1/2,是因为它包含了不对称三相正弦量的情况:
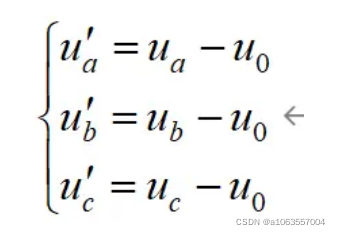
对于三相三线制电路是流不出零序分量的,三相四线制电路时,当三相电压不对称时,中线会通过零序分量,如果ua,ub,uc,为不对称的三相正弦量,那么它们的幅值不同,但角度还是相差120度的,当幅值不相等式,即ua,ub,uc,不对称时,那么总存在三相对称电压:ua’ ub’ uc’,使得:
由对称三相电的性质得:
可得:
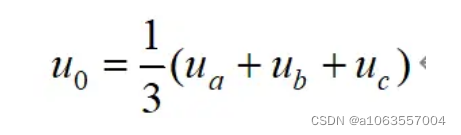
然后提取2/3后,由变化后幅值相等就变成了上面矩阵那一行的1/2了。U0为零轴电流分量,如果电压本来对称的话,它的值为0。因为我们主要研究的是三相对称电路,所以u0不必过度纠结,如果不对称的话往往用正负序分离的方法解决,这也不会用到U0。所以最后一行系数不必过度纠结。
上面的坐标系是a轴与alpha轴重合的情况,这是我们常用的情况,但有些书上是按照alpha轴滞后于a轴90度来推导的
首先这样的坐标轴如下:
上式推导的结果重写如下:
这个式子是和alpha beta轴的位置无关的,因为它是在三相坐标系下得到的结果,他只是将最后得到的量映射到了对应的坐标轴上。如果对应到上面的坐标轴上,beta轴上的量是原来的Valpha, 现在的alpha轴在下面,那么它上面的量就相当于,原来的-Vbeta,因为之前的beta轴就在现在的alpha方向上,但是方向相反,所以加个负号。那么这样变化后的两静止坐标系上的分量就变为:
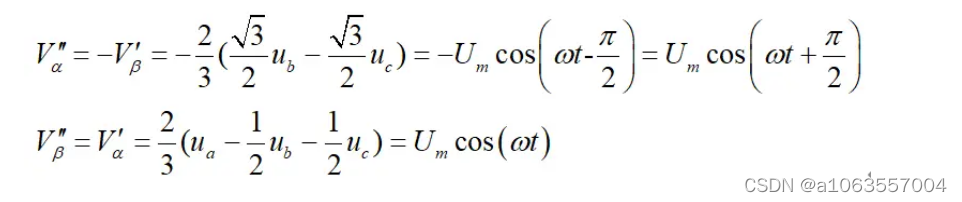
依然是alpha分量超前于beta轴分量90度。但是此时beta轴上的量为原来a轴的量,这也很好理解,因为beta轴和a轴重合嘛。
这样坐标变换矩阵就如下所示:
再说一下等功率变换:
由上面可知,经过运算后三相坐标系上的正弦量,变换成两相坐标系上的正弦量如下 作者:

如果设三相电压与电流的夹角为 theta,那么变换到两相坐标系后电压电流的夹角依然不变,
则三相平均有功功率可表示为

除以根号2代表有效值,×3代表三相,cos theta代表有功功率
两相有功功率可表示为:

1/2是两个根号2相乘,3/2是变换成两相静止坐标系所带的系数
假设原来变换时,乘以个系数k,使得前后功率相等,则有:

解得:
则最终的变换为:
则有:
写成矩阵的形式如下:
最最后一行一般不用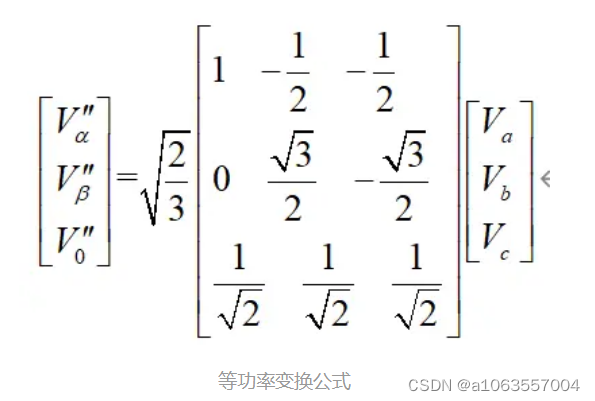
我们通常用到的主要是alpha轴和beta轴上的量,通过上面对比,除最后一行零序分量外,等功率变换和等幅值变换只是相差了个系数问题
Park变换,旋转变换,由两相静止坐标系到两相旋转坐标系上的转化,旋转角度与三相正弦量的角度一致。从a轴开始,以wt的角速度旋转,这样合成的电压矢量会和坐标轴同步旋转,所以坐标轴上的分量就是直流量了,这样就把三相交流量转化成了两相直流量,方便我们用比例积分去控制。
首先说明一下,如果前面是恒功率变换,那这里变换后的结果就是恒功率,如果前面是恒幅值变换,那么这里变换后的结果就是恒幅值。
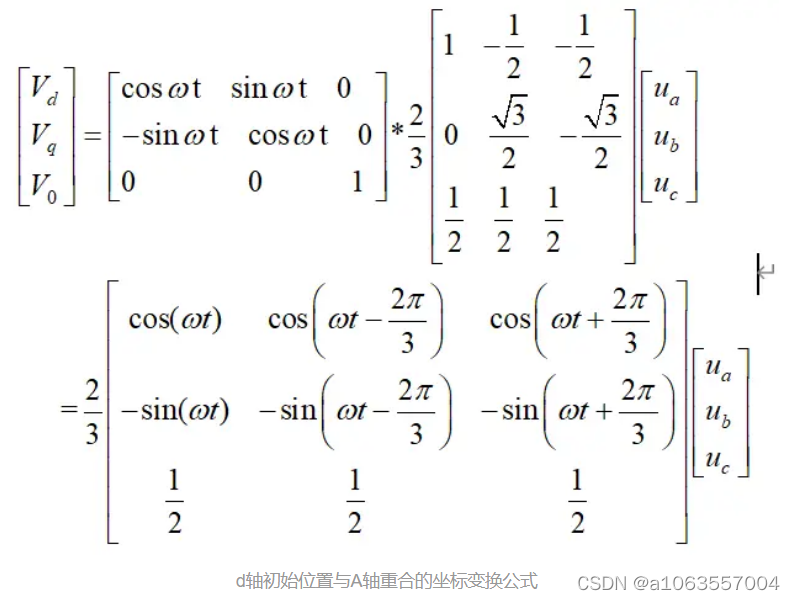
先分析d轴起始位置与a轴重合的情况:基于cos的park变换
坐标系如下:
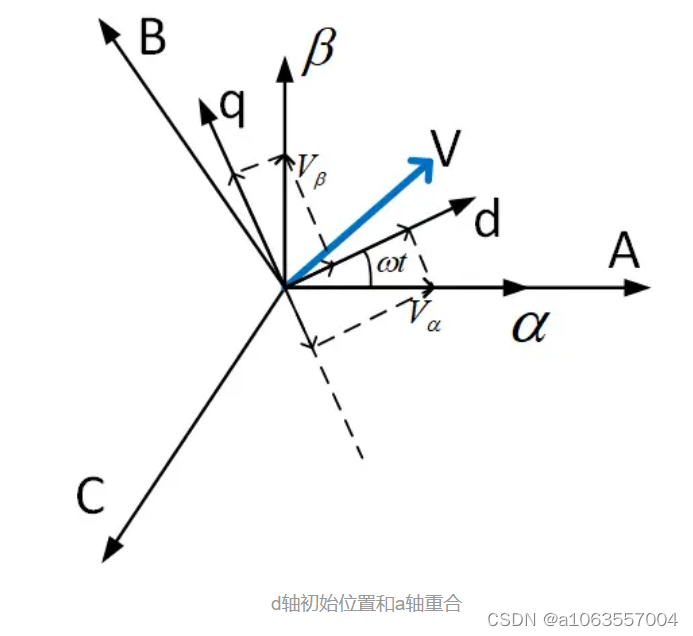
通过坐标分解可得:
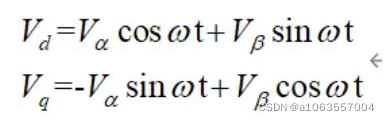
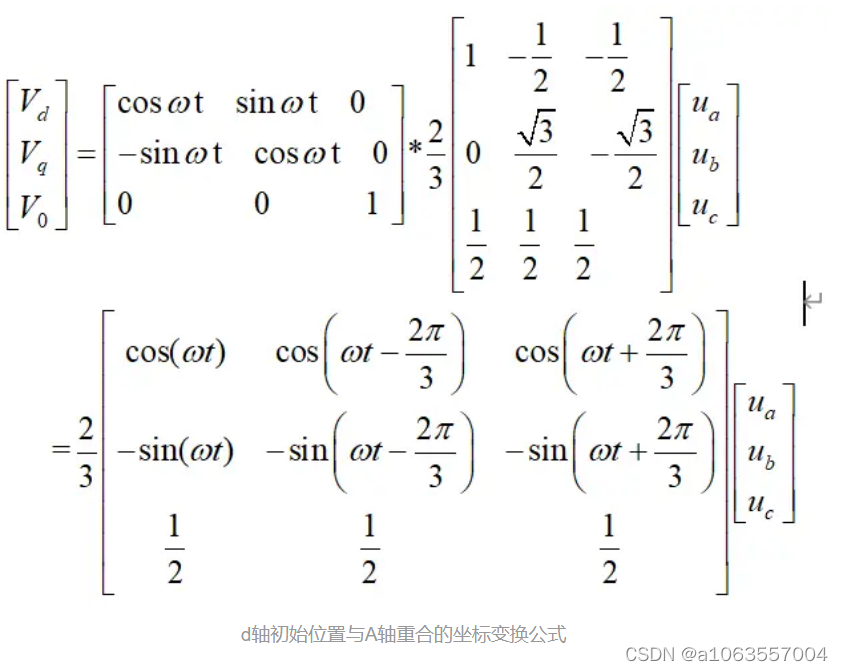
将clarke变换的公式代入上式就可以得到abc到dq0的坐标变换矩阵,以等幅值为例,如下:
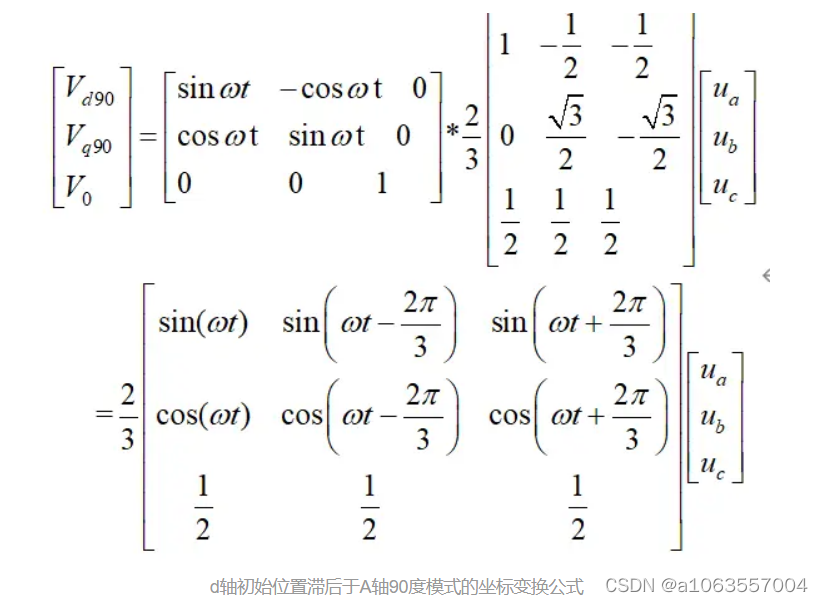
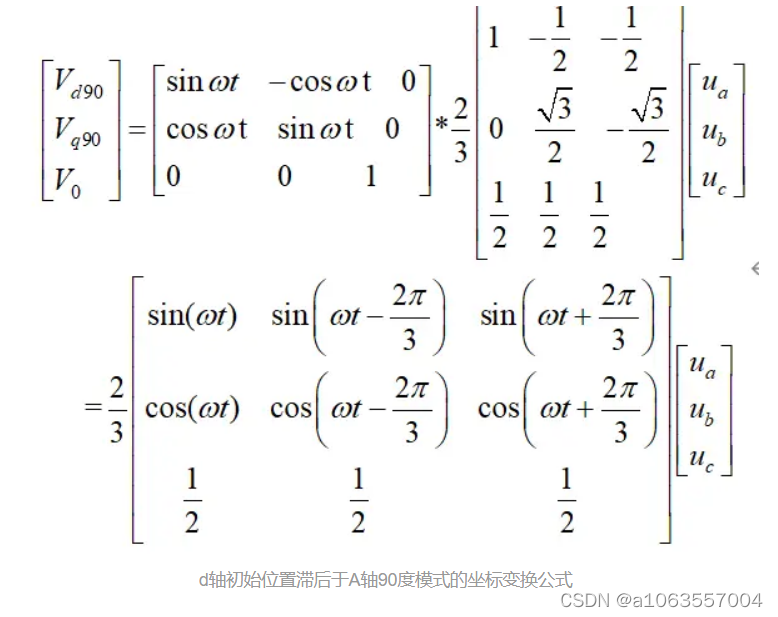
如果d轴起始位置滞后于a轴90度:基于sin的park变换
坐标系如下,注意,旋转角度依然从A轴开始旋转,q轴为参考轴:
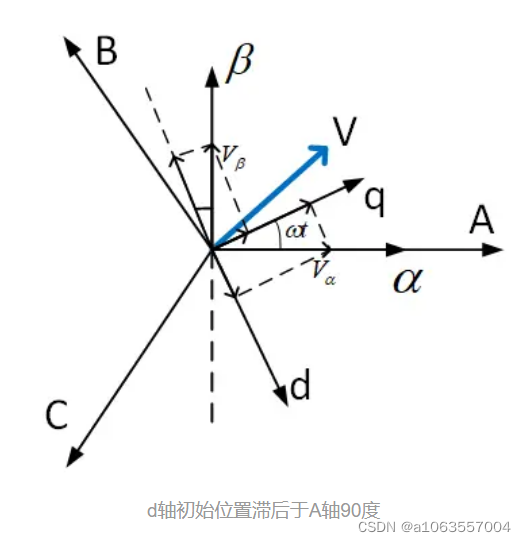
通过坐标分解可得:
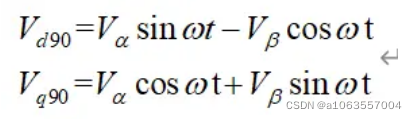
写成矩阵的形式为:
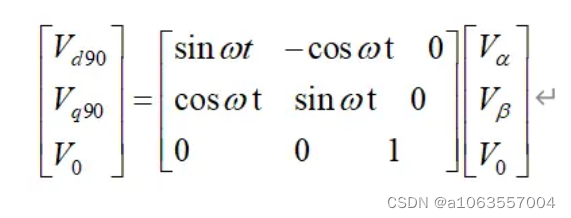
将clarke变换的公式代入上式就可以得到abc到dq0的坐标变换矩阵,以等幅值为例:
下面来看个现象:
现在进行归一化处理,给定电压幅值为1的正弦量,分别用sin cos的形式表示
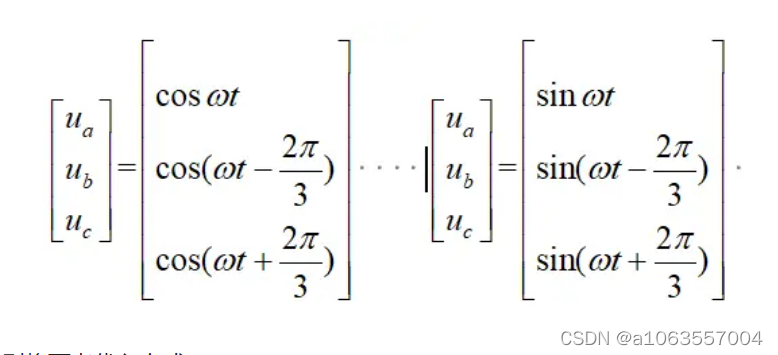
然后分别将两者代入上式:
将cos形式电压的代入a轴与d轴起始位置重合的情况:
电压表达式也用了角速度ωt、dq轴也按角速度ωt进行旋转,说明合成矢量是和dq坐标系的d轴重合

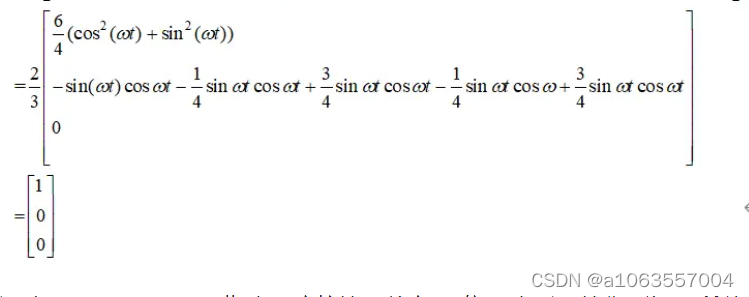
可以得到:Vd==1, Vq == 0; 此时d是主控轴, 给定cos信号时使得d轴分量为1,所以是基于cos型的坐标系。
同理:将cos的形式代入d初始时滞后a轴90度的情况得:
将sin的形式代入d初始时与a轴重合的情况得:
将sin的形式代入d初始时滞后a轴90度的情况得:
我们习惯把d轴当做主轴来控制,就是通过变换后最好让d轴分量为1,所以当系统所使用的电压为cos形式时,那么用a轴与d轴重合的形式比较方便,此时d轴为1,对应simulink中的Rotating frame aligned with A axis at t = 0模式;如果系统使用的三相为sin的形式,那么使用d初始时刻滞后于a轴90度时比较方便,此时d轴为1,对应simulink中的Rotating frame aligned 90 degrees behind A axis模式;上面的结果也正对应了simulink 模块help中的一段话
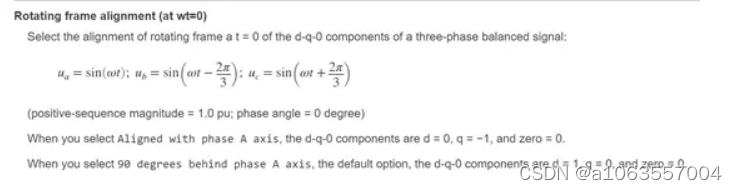
如果经常仿真的话会发现,我们通常都是用它默认的Rotating frame aligned 90 degrees behind A axis模式,这也是因为我们给定的通常都是sin的形式,这样直接把d轴作为主轴控制就不会有问题。
最后将上面的公式总结一下:
坐标模式为alpha轴和A轴重合,另一种模式不常用,这里不再给出。
clarke变换公式:
park变换(以等幅值变换为例)
d轴起始位置与A轴重合:
d轴起始位置滞后于A轴90度:

















 3683
3683

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









