






点积还有数学表现的形式,如下:数学形式:x*x' + y*y' +z*z'
i×j=k;
j×k=i ;
k×i=j ;
通过这些规则,两个向量的叉积的坐标可以方便地计算出来,不需要考虑任何角度:设
a= [a1, a2, a3] =a1i+ a2j+ a3k;
b= [b1,b2,b3]=b1i+ b2j+ b3k ;
则a × b= [a2b3-a3b2,a3b1-a1b3, a1b2-a2b1]。
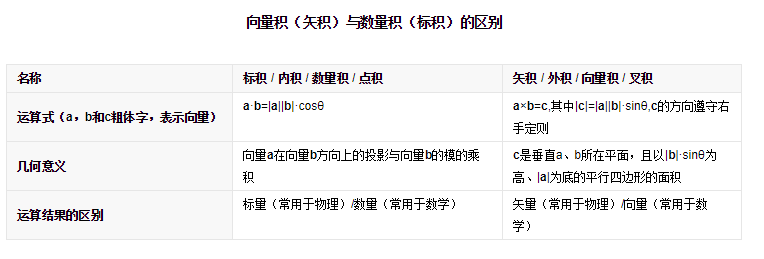
注:向量积 ≠向量的积(向量的积一般指点乘)
一定要清晰地区分开向量积(矢积)与数量积(标积)。见下表。


4、shader内置变量:
gl_Position: 用于vertex shader, 写顶点位置;被图元收集、裁剪等固定操作功能所使用;其内部声明是:highp vec4 gl_Position;
gl_PointSize: 用于vertex shader, 写光栅化后的点大小,像素个数;其内部声明是:mediump float gl_Position;
gl_FragColor: 用于Fragment shader,写fragment color;被后续的固定管线使用;mediump vec4 gl_FragColor;
gl_FragData: 用于Fragment shader,是个数组,写gl_FragData[n] 为data n;被后续的固定管线使用;mediump vec4 gl_FragData[gl_MaxDrawBuffers];
gl_FragColor和gl_FragData是互斥的,不会同时写入;
gl_FragCoord: 用于Fragment shader,只读, Fragment相对于窗口的坐标位置 x,y,z,1/w; 这个是固定管线图元差值后产生的;z 是深度值; mediump vec4 gl_FragCoord;
gl_FrontFacing: 用于判断 fragment是否属于 front-facing primitive;只读;bool gl_FrontFacing;
gl_PointCoord: 仅用于 point primitive; mediump vec2 gl_PointCoord;
5、shader内置常量:
const mediump int gl_MaxVertexAttribs = 8;
const mediump int gl_MaxVertexUniformVectors = 128;
const mediump int gl_MaxVaryingVectors = 8;
const mediump int gl_MaxVertexTextureImageUnits = 0;
const mediump int gl_MaxCombinedTextureImageUnits = 8;
const mediump int gl_MaxTextureImageUnits = 8;
const mediump int gl_MaxFragmentUnitformVectors = 16;
const mediump int gl_MaxDrawBuffers = 1;
6、shader内置函数:
一般默认都用弧度;
radians(degree) : 角度变弧度;
degrees(radian) : 弧度变角度;
sin(angle), cos(angle), tan(angle)
asin(x): arc sine, 返回弧度 [-PI/2, PI/2];
acos(x): arc cosine,返回弧度 [0, PI];
atan(y, x): arc tangent, 返回弧度 [-PI, PI];
atan(y/x): arc tangent, 返回弧度 [-PI/2, PI/2];
pow(x, y): x的y次方;
exp(x): 指数, log(x):
exp2(x): 2的x次方, log2(x):
sqrt(x): x的根号; inversesqrt(x): x根号的倒数
abs(x): 绝对值
sign(x): 符号, 1, 0 或 -1
floor(x): 底部取整
ceil(x): 顶部取整
fract(x): 取小数部分
mod(x, y): 取模, x - y*floor(x/y)
min(x, y): 取最小值
max(x, y): 取最大值
clamp(x, min, max): min(max(x, min), max);
mix(x, y, a): x, y的线性混叠, x(1-a) + y*a;
length(x): 向量长度
distance(p0, p1): 两点距离, length(p0-p1);
dot(x, y): 点积,各分量分别相乘 后 相加
cross(x, y): 差积,x[1]*y[2]-y[1]*x[2], x[2]*y[0] - y[2]*x[0], x[0]*y[1] - y[0]*x[1]
normalize(x): 归一化, length(x)=1;
faceforward(N, I, Nref): 如 dot(Nref, I)< 0则N, 否则 -N
reflect(I, N): I的反射方向, I -2*dot(N, I)*N, N必须先归一化
refract(I, N, eta): 折射,k=1.0-eta*eta*(1.0 - dot(N, I) * dot(N, I)); 如k<0.0 则0.0,否则 eta*I - (eta*dot(N, I)+sqrt(k))*N
matrixCompMult(matX, matY): 矩阵相乘, 每个分量 自行相乘, 即 r[i][j] = x[i][j]*y[i][j];矩阵线性相乘,直接用 *
lessThan(vecX, vecY): 向量 每个分量比较 x < y
lessThanEqual(vecX, vecY): 向量 每个分量比较 x<=y
greaterThan(vecX, vecY): 向量 每个分量比较 x>y
greaterThanEqual(vecX, vecY): 向量 每个分量比较 x>=y
equal(vecX, vecY): 向量 每个分量比较 x==y
notEqual(vecX, vexY): 向量 每个分量比较 x!=y
any(bvecX): 只要有一个分量是true, 则true
all(bvecX): 所有分量是true, 则true
not(bvecX): 所有分量取反
texture2D(sampler2D, coord): texture lookup
texture2D(sampler2D, coord, bias): LOD bias, mip-mapped texture
texture2DProj(sampler2D, coord):
texture2DProj(sampler2D, coord, bias):
texture2DLod(sampler2D, coord, lod):
texture2DProjLod(sampler2D, coord, lod):
textureCube(samplerCube, coord):
textureCube(samplerCube, coord, bias):
textureCubeLod(samplerCube, coord, lod):




- 错误做法:
- 按(10, 0, 0)平移船体。船体中心目前距离原点10个单位。
- 将船体放大2倍。以原点为参照,每个坐标都变成原来的2倍,就出问题了。最后您得到的是一艘放大的船,但其中心位于2*10=20。这并非您预期的结果。
- 正确做法:
- 将船体放大2倍,得到一艘中心位于原点的大船。
- 平移船体。船大小不变,移动距离也正确。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









