



 本文详细介绍了如何在ROS环境中创建并配置程序包。通过具体的步骤指导读者如何使用catkin工具集来建立自己的ROS程序包,并解释了依赖包的管理方式。
本文详细介绍了如何在ROS环境中创建并配置程序包。通过具体的步骤指导读者如何使用catkin工具集来建立自己的ROS程序包,并解释了依赖包的管理方式。
你的 ROS 程序包都放到下面这个目录里, 切换到这个目录:
$ cd ~/catkin_ws/src
使用下面的命令: 创建一个 ROS 程序包 名字就叫:beginner_tutorials
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp //程序包后面是依赖的程序包。(类似于添加的头文件和链接文件)

进入 beginner_tutorials路径里看看:
打开 CMakeLists.txt 文件---gedit CMakeLists.txt,看看:

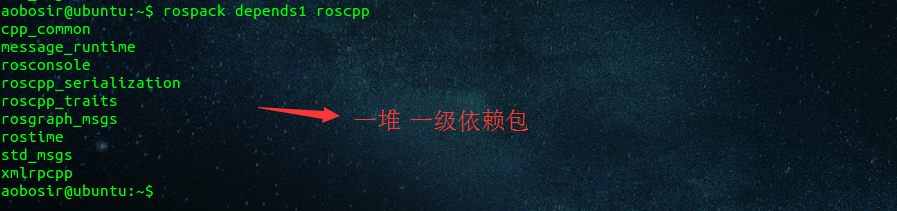
rospack 这个命令不但可以查找软件包的所在目录,还可以查看一个软件包的依赖包都有哪些:

罗列出来的这 3 个软件包中,比如 roscpp 这个软件包的依赖包又有哪些:
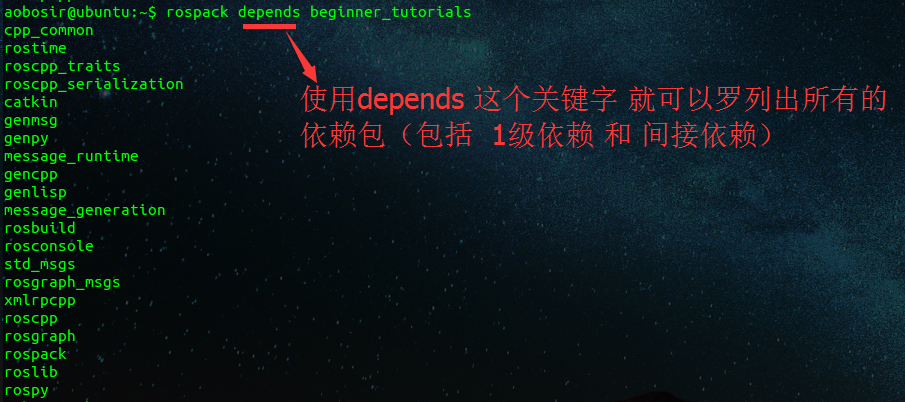
对有 beginner_tutorials 包来说,它的依赖包(roscpp、rospy、std_msgs)的依赖包,就是 beginner_tutorials 包的间接依赖包:
总结:
catkin_create_pkg 是用来创建 ROS 程序包的。 catkin_make :是用来编译程序包的。 (catkin_make 相当于执行了cmake.. 然后再执行 make)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









