







边缘检测虽然能够检测出边缘,但边缘是不连续的,检测到的边缘并不是一个整体。图像轮廓是指将边缘连接起来形成的一个整体,用于后续的计算。
OpenCV提供了查找图像轮廓的函数cv2.findContours(),该函数能够查找图像内的轮廓信息,而函数cv2.drawContours()能够将轮廓绘制出来。图像轮廓是图像中非常重要的一个特征信息,通过对图像轮廓的操作,我们能够获取目标图像的大小、位置、方向等信息。一个轮廓对应着一系列的点,这些点以某种方式表示图像中的一条曲线。
1)查找并绘制轮廓
-
查找轮廓函数:cv2.findContours
-
语法格式:image,contours,hierarchy=cv2.findContours(image,mode,method)
-
返回值
- image:与函数参数中的原始图像image一致
- contours:返回的轮廓。该返回值返回的是一组轮廓信息,每个轮廓都是由若干个点所构成的(每个轮廓为一个list表示)。例如,contours[i]是第i个轮廓(下标从0开始),contours[i][j]是第i个轮廓内的第j个点
- hierarchy:图像的拓扑信息(反映轮廓层次)。图像内的轮廓可能位于不同的位置。比如,一个轮廓在另一个轮廓的内部。在这种情况下,我们将外部的轮廓称为父轮廓,内部的轮廓称为子轮廓。按照上述关系分类,一幅图像中所有轮廓之间就建立了父子关系。每个轮廓contours[i]对应4个元素来说明当前轮廓的层次关系。其形式为:[Next,Previous,First_Child,Parent],分别表示后一个轮廓的索引编号、前一个轮廓的索引编号、第1个子轮廓的索引编号、父轮廓的索引编号
-
参数
- image:原始图像。灰度图像会被自动处理为二值图像。在实际操作时,可以根据需要,预先使用阈值处理等函数将待查找轮廓的图像处理为二值图像。
- mode:轮廓检索模式,有以下取值和含义:
取值 含义 cv2.RETR_EXTERNAL 只检测外轮廓 cv2.RETR_LIST 对检测到的轮廓不建立等级关系 cv2.RETR_CCOMP 检索所有轮廓并将它们组织成两级层次结构,上面的一层为外边界,下面的一层为内孔的边界 cv2.RETR_TREE 建立一个等级树结构的轮廓 - method:轮廓的近似方法,主要有如下取值:
取值 含义 cv2.CHAIN_APPROX_NONE 存储所有的轮廓点,相邻两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))=1 cv2.CHAIN_APPROX_SIMPLE 压缩水平方向、垂直方向、对角线方向的元素,只保留该方向的终点坐标 cv2.CHAIN_APPROX_TC89_L1 使用teh-Chinl chain近似算法的一种风格 cv2.CHAIN_APPROX_TC89_KCOS 使用teh-Chinl chain近似算法的一种风格 -
注意事项
- 待处理的源图像必须是灰度二值图
- 都是从黑色背景中查找白色对象。因此,对象必须是白色的,背景必须是黑色的
- 在OpenCV 4.x中,函数cv2.findContours()仅有两个返回值
-
-
绘制轮廓:drawContours函数
- 语法格式:image=cv2.drawContours(image, contours,contourIdx, color)
- 参数
- image:待绘制轮廓的图像
- contours:需要绘制的轮廓,该参数的类型与函数 cv2.findContours()的输出 contours 相同,都是list类型
- contourIdx:需要绘制的边缘索引,告诉函数cv2.drawContours()要绘制某一条轮廓还是全部轮廓。如果该参数是一个整数或者为零,则表示绘制对应索引号的轮廓;如果该值为负数(通常为“-1”),则表示绘制全部轮廓。
- color:绘制的颜色,用BGR格式表示
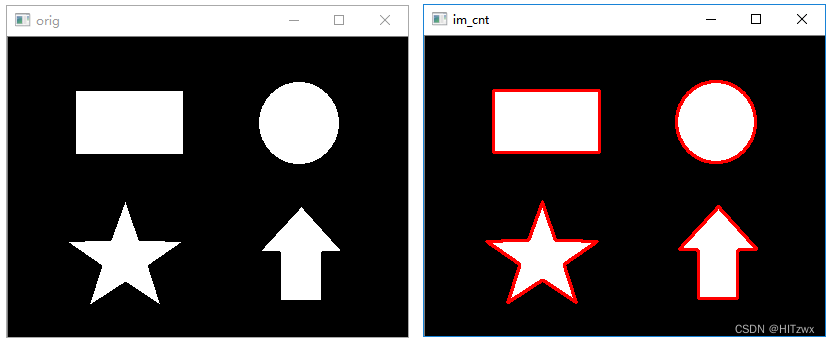
# 查找图像轮廓
import cv2
import numpy as np
im = cv2.imread("../data/3.png")
cv2.imshow("orig", im)
gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
# 图像二值化处理,将大于阈值的设置为最大值,其它设置为0
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 查找图像边沿:cv2.findContours
img, contours, hierarchy = cv2.findContours(binary, # 二值化处理后的图像
cv2.RETR_EXTERNAL, # 只检测外轮廓
cv2.CHAIN_APPROX_NONE) # 存储所有的轮廓点
# 打印所有轮廓值
arr_cnt = np.array(contours)
print(arr_cnt[0].shape)
print(arr_cnt[1].shape)
print(arr_cnt[2].shape)
print(arr_cnt[3].shape)
# print(arr_cnt[0])
# 绘制边沿
im_cnt = cv2.drawContours(im, # 绘制图像
contours, # 轮廓点列表
-1, # 绘制全部轮廓
(0, 0, 255), # 轮廓颜色:红色
2) # 轮廓粗细
cv2.imshow("im_cnt", im_cnt)
cv2.waitKey()
cv2.destroyAllWindows()
执行结果:
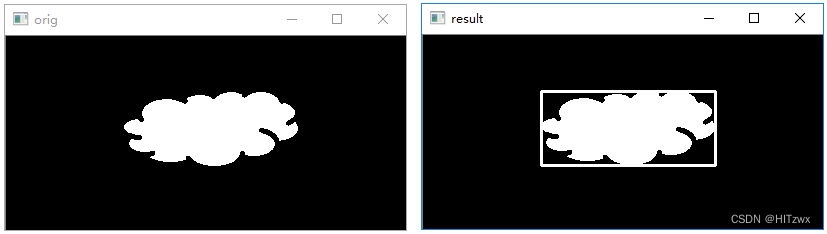
2)绘制矩形包围框
函数cv2.boundingRect()能够绘制轮廓的矩形边界。该函数的语法格式为:
retval = cv2.boundingRect(array) # 格式一
x,y,w,h = cv2.boundingRect(array) # 格式二
"""
参数:
array:是灰度图像或轮廓
返回值:
retval:表示返回的矩形边界的左上角顶点的坐标值及矩形边界的宽度和高度
x, y, w, h: 矩形边界左上角顶点的x坐标、y坐标、宽度、高度
"""
代码:
# 绘制图像矩形轮廓
import cv2
import numpy as np
im = cv2.imread("../data/cloud.png", 0)
cv2.imshow("orig", im)
# 提取图像轮廓
ret, binary = cv2.threshold(im, 127, 255, cv2.THRESH_BINARY)
img, contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST, # 不建立等级关系
cv2.CHAIN_APPROX_NONE) # 存储所有的轮廓点
print("contours[0].shape:", contours[0].shape)
# 返回轮廓定点及边长
x, y, w, h = cv2.boundingRect(contours[0]) # 计算矩形包围框的x,y,w,h
print("x:", x, "y:", y, "w:", w, "h:", h)
# 绘制矩形包围框
brcnt = np.array([[[x, y]], [[x + w, y]], [[x + w, y + h]], [[x, y + h]]])
cv2.drawContours(im, # 绘制图像
[brcnt], # 轮廓点列表
-1, # 绘制全部轮廓
(255, 255, 255), # 轮廓颜色:白色
2) # 轮廓粗细
cv2.imshow("result", im) # 显示绘制后的图像
cv2.waitKey()
cv2.destroyAllWindows()
执行结果:
3)绘制圆形包围圈
函数 cv2.minEnclosingCircle()通过迭代算法构造一个对象的面积最小包围圆形。该函数的语法格式为:
center,radius=cv2.minEnclosingCircle(points)
"""
参数:
points: 轮廓数组
返回值:
center: 最小包围圆形的中心
radius: 最小包围圆形的半径
"""
代码:
# 绘制最小圆形
import cv2
import numpy as np
im = cv2.imread("../data/cloud.png", 0)
cv2.imshow("orig", im)
# 提取图像轮廓
ret, binary = cv2.threshold(im, 127, 255, cv2.THRESH_BINARY)
img, contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE)
(x, y), radius = cv2.minEnclosingCircle(contours[0])
center = (int(x), int(y))
radius = int(radius)
cv2.circle(im, center, radius, (255, 255, 255), 2) # 绘制圆
cv2.imshow("result", im) # 显示绘制后的图像
cv2.waitKey()
cv2.destroyAllWindows()
执行结果:

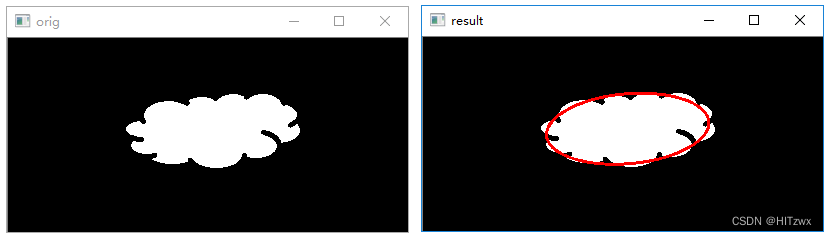
4)绘制最佳拟合椭圆
函数cv2.fitEllipse()可以用来构造最优拟合椭圆。该函数的语法格式是:
retval=cv2.fitEllipse(points)
"""
参数:
points: 轮廓
返回值:
retval: 为RotatedRect类型的值,包含外接矩形的质心、宽、高、旋转角度等参数信息,这些信息正好与椭圆的中心点、轴长度、旋转角度等信息吻合
"""
代码:
# 绘制最优拟合椭圆
import cv2
import numpy as np
im = cv2.imread("../data/cloud.png")
gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
cv2.imshow("orig", gray)
# 提取图像轮廓
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
img, contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_NONE)
ellipse = cv2.fitEllipse(contours[0]) # 拟合最优椭圆
print("ellipse:", ellipse)
cv2.ellipse(im, ellipse, (0, 0, 255), 2) # 绘制椭圆
cv2.imshow("result", im) # 显示绘制后的图像
cv2.waitKey()
cv2.destroyAllWindows()
执行结果:
5)逼近多边形
函数cv2.approxPolyDP()用来构造指定精度的逼近多边形曲线。该函数的语法格式为:
approxCurve = cv2.approxPolyDP(curve,epsilon,closed)
"""
参数:
curve: 轮廓
epsilon: 精度,原始轮廓的边界点与逼近多边形边界之间的最大距离
closed: 布尔类型,该值为True时,逼近多边形是封闭的;否则,逼近多边形是不封闭的
返回值:
approxCurve: 逼近多边形的点集
"""
代码:
# 构建多边形,逼近轮廓
import cv2
import numpy as np
im = cv2.imread("../data/cloud.png")
cv2.imshow("im", im)
gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
# 提取图像轮廓
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
img, contours, hierarchy = cv2.findContours(binary,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_NONE)
# 精度一
adp = im.copy()
epsilon = 0.005 * cv2.arcLength(contours[0], True) # 精度,根据周长计算
approx = cv2.approxPolyDP(contours[0], epsilon, True) # 构造多边形
adp = cv2.drawContours(adp, [approx], 0, (0, 0, 255), 2) # 绘制多边形
cv2.imshow("result_0.005", adp)
# 精度二
adp2 = im.copy()
epsilon = 0.01 * cv2.arcLength(contours[0], True) # 精度,根据周长计算
approx = cv2.approxPolyDP(contours[0], epsilon, True) # 构造多边形
adp = cv2.drawContours(adp2, [approx], 0, (0, 0, 255), 2) # 绘制多边形
cv2.imshow("result_0.01", adp2)
cv2.waitKey()
cv2.destroyAllWindows()
执行结果:

















 1685
1685











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











