






四旋翼PID控制仿真模型
matlab仿真程序,支持姿态单独控制,阶跃信号,方波,正弦波直接输入姿态环,波形完美,可以选择接入位置环,定点控制,轨迹跟踪,一键切换轨迹等功能。
带公式推导文档
ID:3150682697298838
yuchongzhangyuan
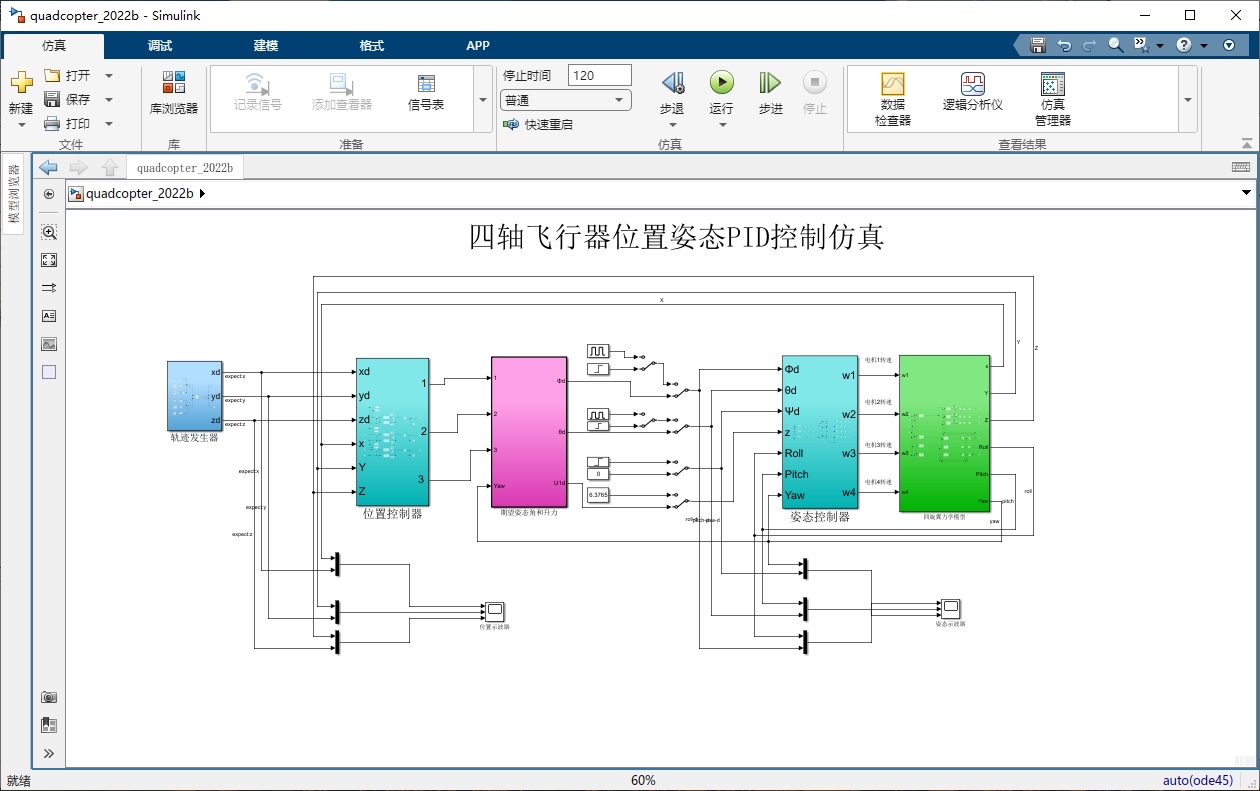
四旋翼PID控制仿真模型是一种基于matlab仿真程序的控制技术,具备支持姿态单独控制、阶跃信号、方波和正弦波直接输入姿态环等功能。该模型能够实现波形完美、选择接入位置环、定点控制、轨迹跟踪以及一键切换轨迹等功能。本文将对该仿真模型进行详细的技术分析。
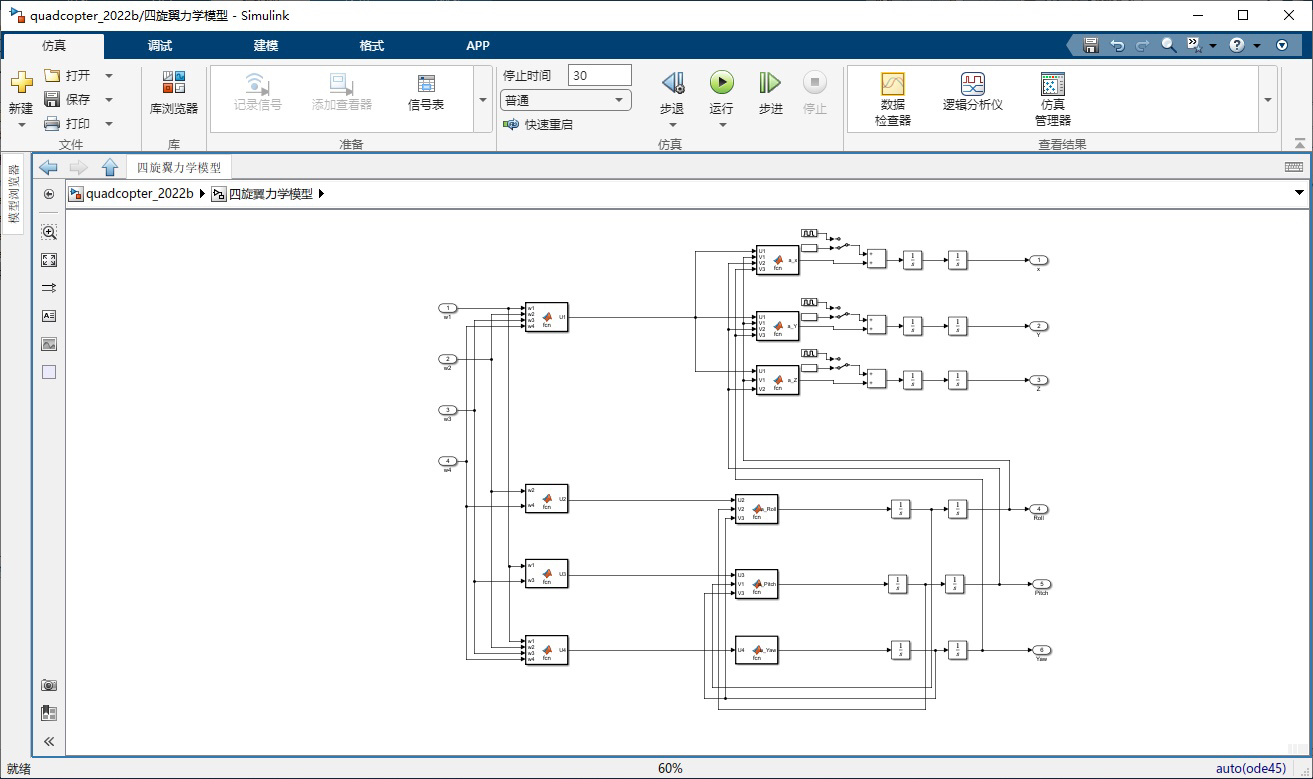
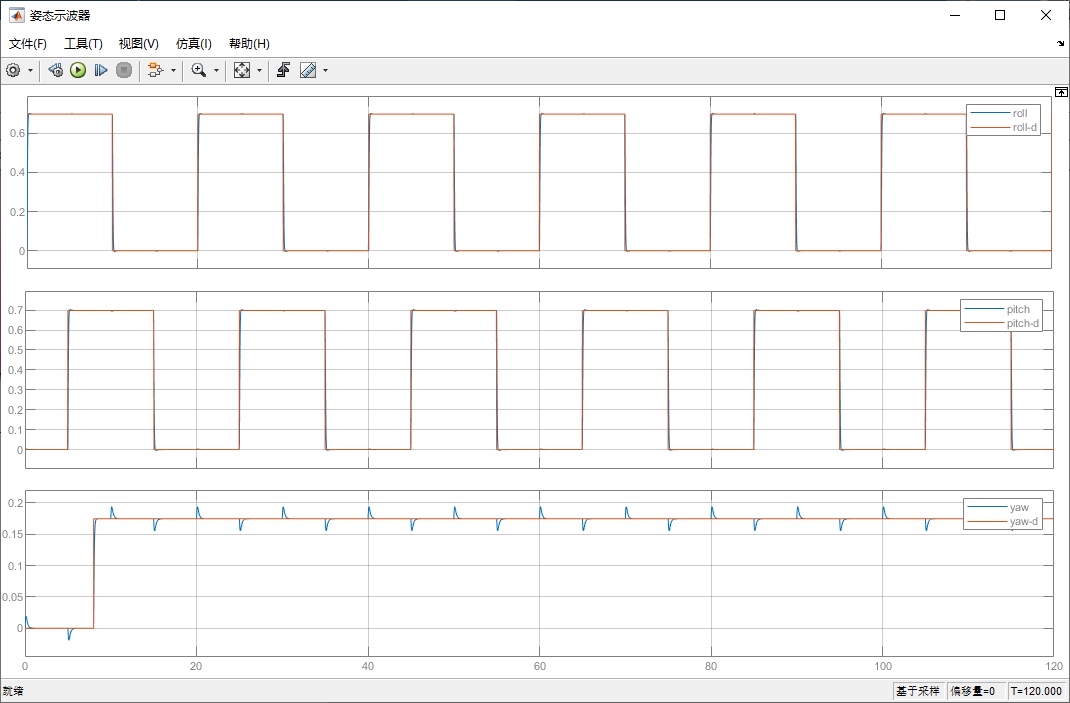
在四旋翼飞行器中,PID控制是一种常见且重要的控制算法。通过对四旋翼的姿态进行监测和调节,PID控制可以实现对飞行器的稳定和精确操控。在该仿真模型中,PID控制算法被应用于四旋翼的姿态控制中。
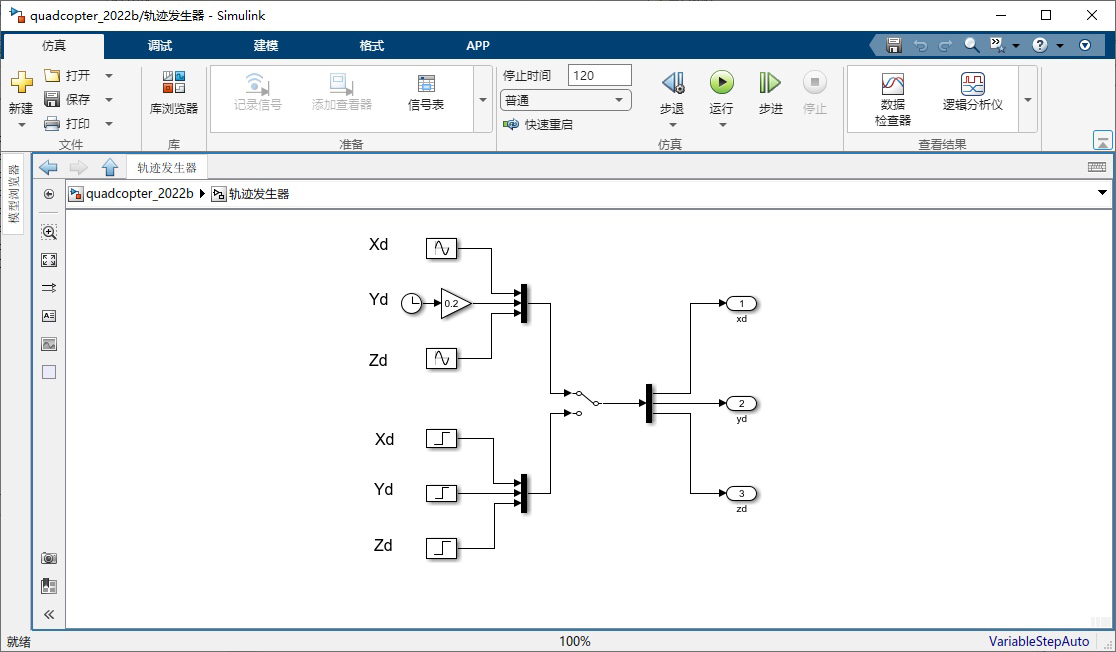
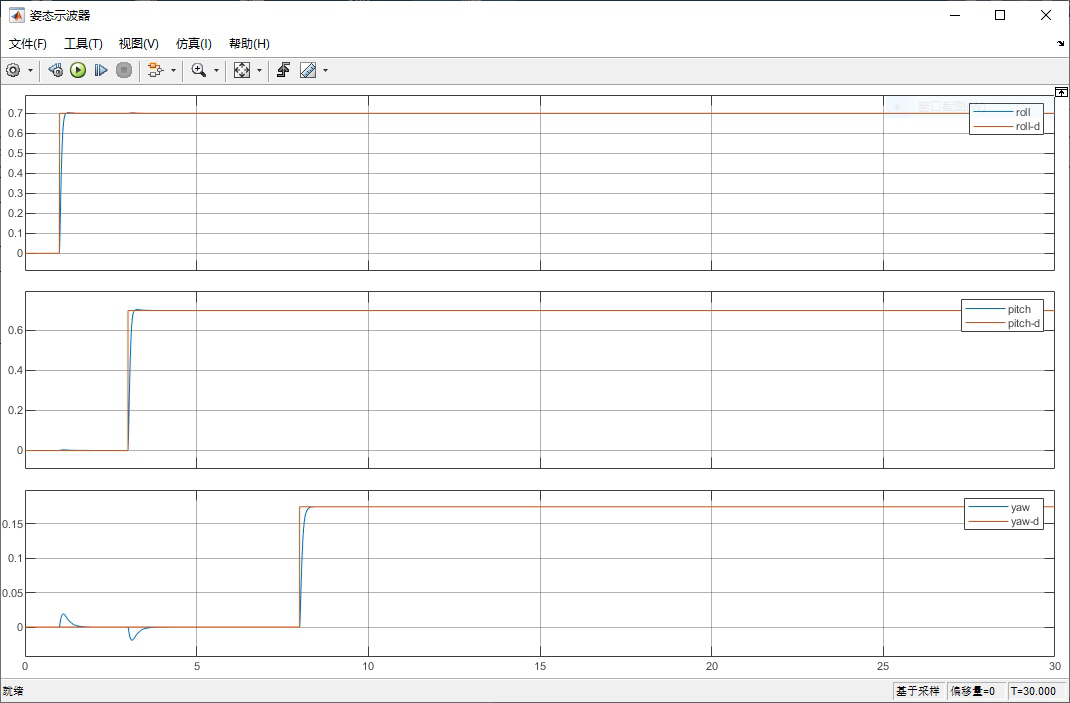
首先,我们来看一下该仿真程序的主要功能。该程序支持姿态单独控制,这意味着可以通过控制四旋翼的姿态来实现对飞行器的稳定控制。同时,该程序还支持输入不同的信号类型,如阶跃信号、方波和正弦波,以模拟不同的控制情况和应对不同的飞行任务。此外,该程序还具备一键切换轨迹的功能,这意味着可以根据实际需求灵活切换飞行器的轨迹。
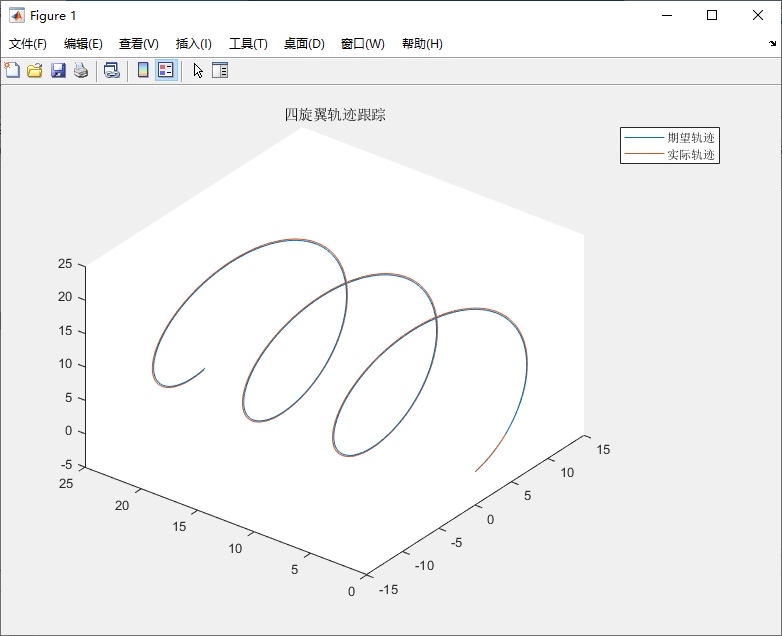
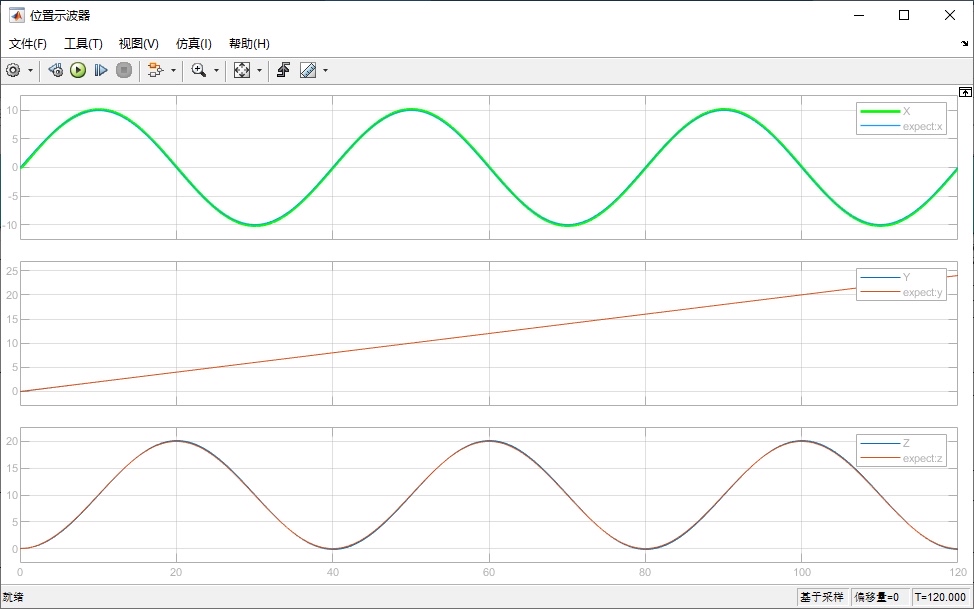
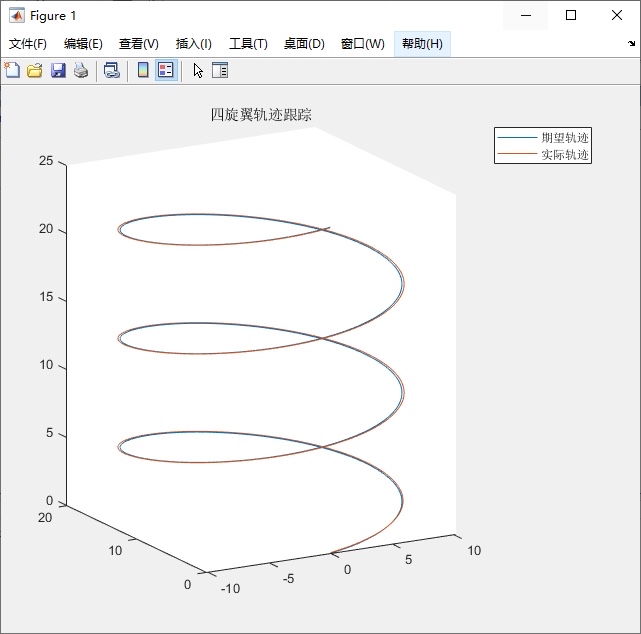
在该仿真模型中,位置环的接入是可选的。通过接入位置环,可以实现对飞行器的定点控制。定点控制是指使飞行器在空中固定某一位置的控制方式。通过控制位置环的输出信号,可以实现飞行器在空中悬停或在指定位置上下、左右移动的功能。除了定点控制外,该程序还支持轨迹跟踪功能。轨迹跟踪是指使飞行器按照预设轨迹进行飞行的控制方式。通过该功能,飞行器可以按照指定的轨迹进行自动飞行,如沿着直线、圆形或其他曲线路径飞行。
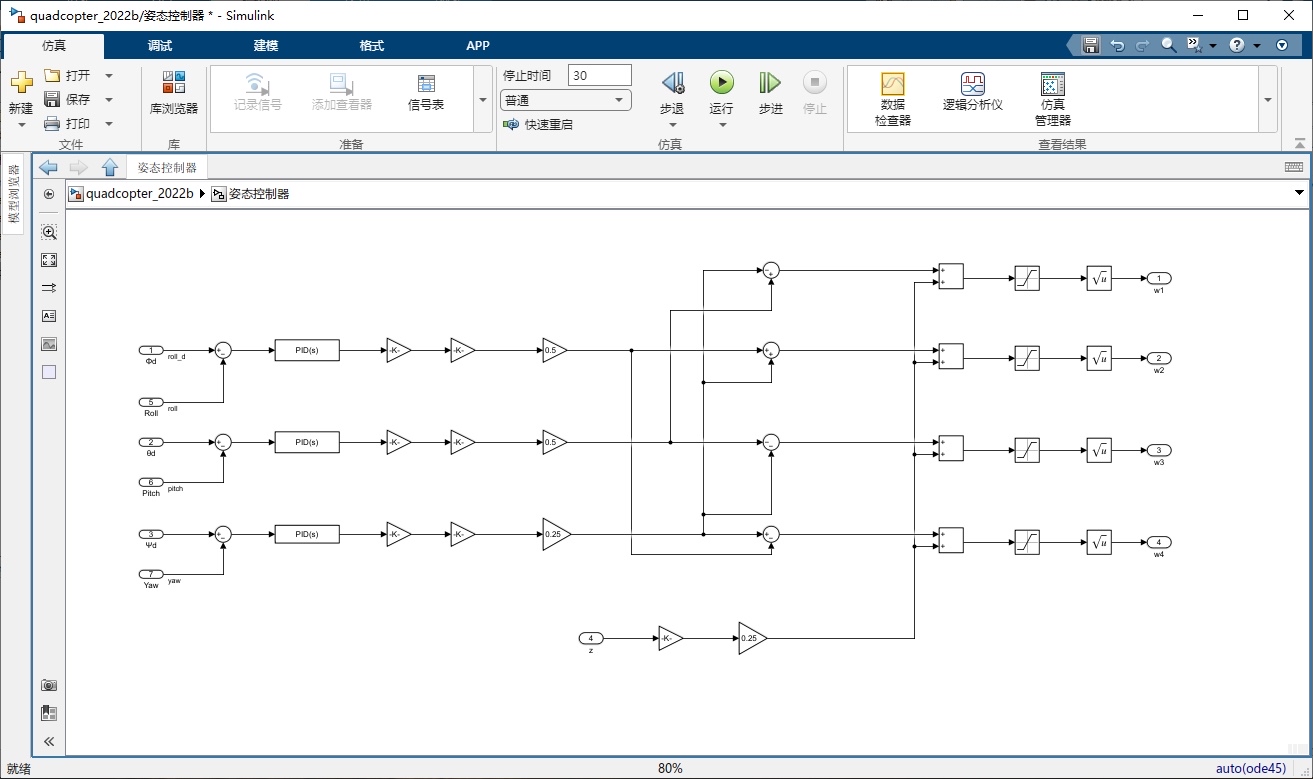
该仿真模型的核心是PID控制算法,其基本原理是通过对四旋翼姿态的误差进行监测和调整,实现对飞行器的稳定控制。PID控制器由三个部分组成,分别是比例(P)、积分(I)和微分(D)控制器。比例控制器根据当前姿态误差的大小进行调整,积分控制器根据姿态误差的累积进行调整,微分控制器根据姿态误差的变化率进行调整。通过调整PID控制器的参数,可以实现对飞行器的精确控制。
在该仿真模型中,还提供了带公式推导的文档,方便用户了解PID控制算法的原理和实现过程。该文档详细介绍了PID控制算法的推导过程,并给出了相应的数学公式。通过对这些公式的理解和应用,用户可以深入了解PID控制算法的工作原理,并在实际应用中进行相应的参数调整和优化。
综上所述,四旋翼PID控制仿真模型是一款功能强大且灵活多变的控制技术。通过该模型,用户可以实现对四旋翼飞行器的姿态控制、定点控制和轨迹跟踪等功能。同时,该模型还提供了详细的文档和公式推导,方便用户深入理解和应用PID控制算法。通过合理调整和优化PID控制器的参数,可以实现对飞行器的精确操控。相信这款仿真模型将为飞行器控制领域的研究和应用带来更多的可能性。
【相关代码 程序地址】: http://nodep.cn/682697298838.html















 7042
7042

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









