







0、介绍
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
步进电机相对于其它控制用途电机的最大区别是,它接收数字控制信号(电脉冲信号)并转化成与之相对应的角位移或直线位移,它本身就是一个完成数字模式转化的执行元件。而且它可开环位置控制,输入一个脉冲信号就得到一个规定的位置增量,这样的所谓增量位置控制系统与传统的直流控制系统相比,其成本明显减低,几乎不必进行系统调整。步进电机的角位移量与输入的脉冲个数严格成正比,而且在时间上与脉冲同步。因而只要控制脉冲的数量、频率和电机绕组的相序,即可获得所需的转角、速度和方向。
1、分类
步进电动机的结构形式和分类方法较多,一般按励磁方式分为磁阻式、永磁式和混磁式三种;按相数可分为单相、两相、三相和多相等形式。
在我国所采用的步进电机中以反应式步进电机为主。步进电机的运行性能与控制方式有密切的关系,步进电机控制系统从其控制方式来看,可以分为以下三类:开环控制系统、闭环控制系统、半闭环控制系统。半闭环控制系统在实际应用中一般归类于开环或闭环系统中。
2.、主要构造
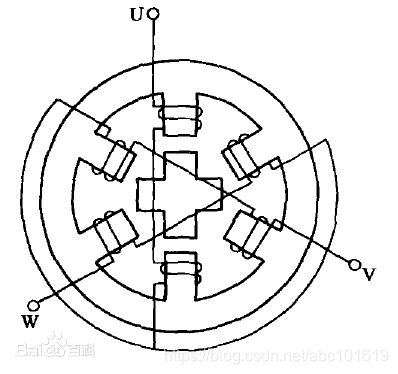
三相磁阻式步进电动机模型的结构示意图如图所示。它的定、转子铁心都由硅钢片叠成。定子上有六个磁极,每两个相对的磁极绕有同一相绕组,三相绕组接成星形作为控制绕组;转子铁心上没有绕组,只有四个齿,齿宽等于定子极靴宽。
3、步进电机加减速过程控制技术
正因为步进电机的广泛应用,对步进电机的控制的研究也越来越多,在启动或加速时如果步进脉冲变化太快,转子由于惯性而跟随不上电信号的变化,产生堵转或失步在停止或减速时由于同样原因则可能产生超步。为防止堵转、失步和超步,提高工作频率,要对步进电机进行升降速控制。
步进电机的转速取决于脉冲频率、转子齿数和拍数。其角速度与脉冲频率成正比,而且在时间上与脉冲同步。因而在转子齿数和运行拍数一定的情况下,只要控制脉冲频率即可获得所需速度。由于步进电机是借助它的同步力矩而启动的,为了不发生失步,启动频率是不高的。特别是随着功率的增加,转子直径增大,惯量增大,启动频率和最高运行频率可能相差十倍之多。
步进电机的起动频率特性使步进电机启动时不能直接达到运行频率,而要有一个启动过程,即从一个低的转速逐渐升速到运行转速。停止时运行频率不能立即降为零,而要有一个高速逐渐降速到零的过程。
步进电机的输出力矩随着脉冲频率的上升而下降,启动频率越高,启动力矩就越小,带动负载的能力越差,启动时会造成失步,而在停止时又会发生过冲。要使步进电机快速的达到所要求的速度又不失步或过冲,其关键在于使加速过程中,加速度所要求的力矩既能充分利用各个运行频率下步进电机所提供的力矩,又不能超过这个力矩。因此,步进电机的运行一般要经过加速、匀速、减速三个阶段,要求加减速过程时间尽量的短,恒速时间尽量长。特别是在要求快速响应的工作中,从起点到终点运行的时间要求最短,这就必须要求加速、减速的过程最短,而恒速时的速度最高。
国内外的科技工作者对步进电机的速度控制技术进行了大量的研究,建立了多种加减速控制数学模型,如指数模型、线性模型等,并在此基础上设计开发了多种控制电路,改善了步进电机的运动特性,推广了步进电机的应用范围指数加减速考虑了步进电机固有的矩频特性,既能保证步进电机在运动中不失步,又充分发挥了电机的固有特性,缩短了升降速时间,但因电机负载的变化,很难实现而线性加减速仅考虑电机在负载能力范围的角速度与脉冲成正比这一关系,不因电源电压、负载环境的波动而变化的特性,这种升速方法的加速度是恒定的,其缺点是未充分考虑步进电机输出力矩随速度变化的特性,步进电机在高速时会发生失步。
4、步进电机的细分驱动控制
步进电机由于受到自身制造工艺的限制,如步距角的大小由转子齿数和运行拍数决定,但转子齿数和运行拍数是有限的,因此步进电机的步距角一般较大并且是固定的,步进的分辨率低、缺乏灵活性、在低频运行时振动,噪音比其他微电机都高,使物理装置容易疲劳或损坏。这些缺点使步进电机只能应用在一些要求较低的场合,对要求较高的场合,只能采取闭环控制,增加了系统的复杂性,这些缺点严重限制了步进电机作为优良的开环控制组件的有效利用。细分驱动技术在一定程度上有效地克服了这些缺点。
步进电机细分驱动技术是年代中期发展起来的一种可以显著改善步进电机综合使用性能的驱动技术。年美国学者、首次在美国增量运动控制系统及器件年会上提出步进电机步距角细分的控制方法。在其后的二十多年里,步进电机细分驱动得到了很大的发展。逐步发展到上世纪九十年代完全成熟的。我国对细分驱动技术的研究,起步时间与国外相差无几。
在九十年代中期的到了较大的发展。主要应用在工业、航天、机器人、精密测量等领域,如跟踪卫星用光电经纬仪、军用仪器、通讯和雷达等设备,细分驱动技术的广泛应用,使得电机的相数不受步距角的限制,为产品设计带来了方便。目前在步进电机的细分驱动技术上,采用斩波恒流驱动,仪脉冲宽度调制驱动、电流矢量恒幅均匀旋转驱动控制止,大大提高步进电机运行运转精度,使步进电机在中、小功率应用领域向高速且精密化的方向发展。
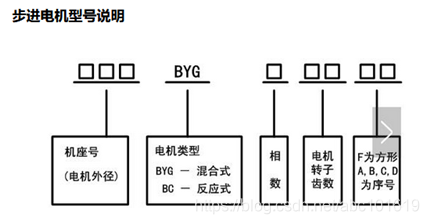
5、步进电机型号说明














 4431
4431











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









