






前言
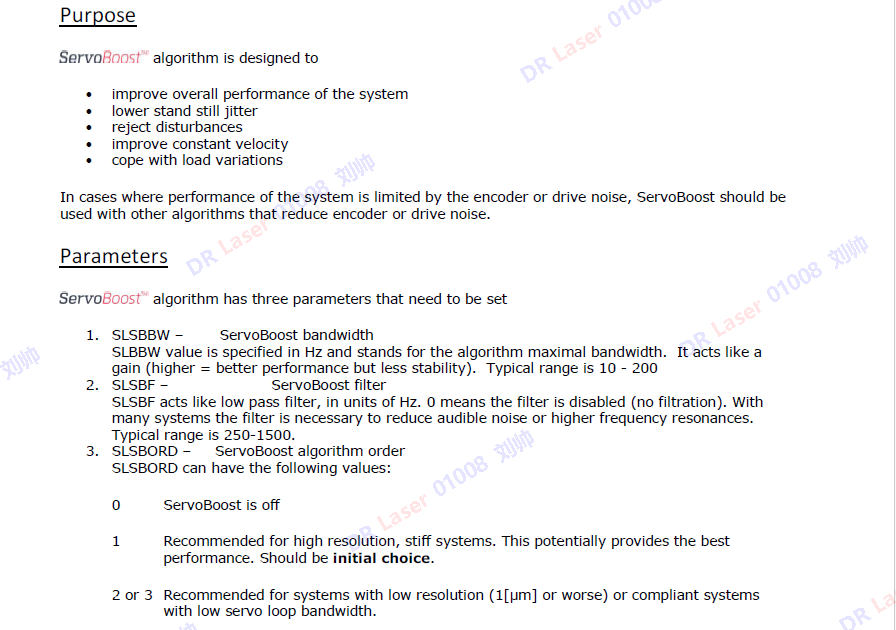
ServoBoost算法设计应用于:
1、提高系统的整体性能
2、轴静止时候较低的抖动
3、抵抗外界的干扰
4、稳定恒定速度
5、应对负载的变化
一、程序以及解读
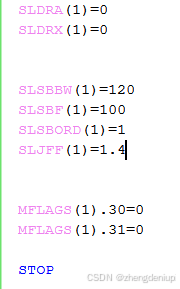
1.程序
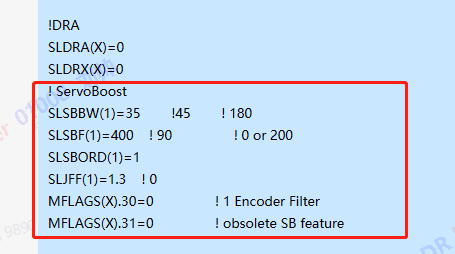
!DRA
SLDRA(X)=0
SLDRX(X)=0
!ServoBoost
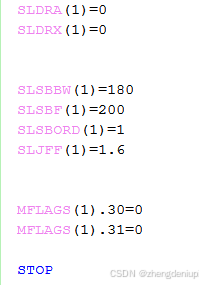
SLSBBW(1)=35 !45 !180
SLSBF(1)=400 !90 !0 or 200
SLSBORD(1)=1
SLJFF(1)=1.3 !0
MFLAGS(X).30=0
MFLAGS(X).31=0
!1 Encoder Filter
!obsolete SB feature
2.解读
SLDRA(X)=0
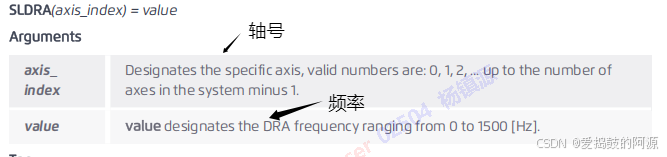
SLDRA是一个真实的数组,在系统中的每个轴上都有一个元素,用于定义给定轴的DRA频率,采用ACS专有的抗扰算法(DRA)来提高伺服系统的抗扰响应,有助于减小沉降阶段的位置误差,缩短沉降时间。
DRA:
DRA最常用的用途是改善安装在被动隔离平台上的系统的沉降。被动隔离通常用于隔离系统和来自地板的干扰。它们使用地震质量,由由橡胶、金属或空气制成的软弹簧支撑。弹簧的阻尼作用吸收了弹簧的共振以上的振动。因此,无源隔离制造商通常试图降低弹簧谐振频率,以增加有效的隔离范围。当施加伺服力产生运动时,它也作用于孤立的静止底座上,使其振动。由于频率很低(通常低于1 Hz,到10 Hz),而且阻尼非常轻,所以隔离系统在运动轮廓结束后很长时间内继续振动。这种振动对伺服系统产生了干扰,引入了位置误差,延长了沉降时间。DRA用于最小化后一种的影响,提高沉降过程中的位置误差。
SLDRX(X)=0
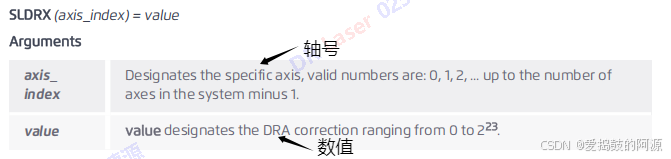
SLDRX是一个真实的数组,在系统中的每个轴上都有一个元素,用于定义给定轴的最大DRA校正。采用ACS专有的抗扰算法(DRA)来提高伺服系统的抗扰响应,有助于减小沉降阶段的位置误差,缩短沉降时间。
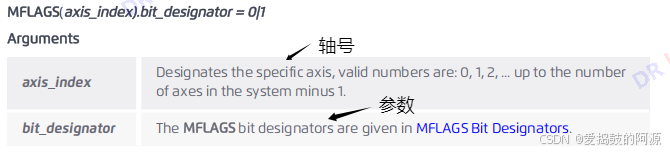
MFLAGS(X).30=0

SLSBORD(1)=1
是否开启ServoBoost算法
0关闭
1开启,系统要求:低分辨率系统,并且系统的刚性较强
2或3开启,系统要求:高分辨率系统(1um更小),并且兼容性强的系统并且刚性较低
SLSBBW(1)=35 !45 !180
ServoBoost算法的带宽
该项参数的单位是HZ,带宽越大性能越好,但是系统稳定性越差
通常设置的范围为:10-200
SLSBF(1)=400 !90 !0 or 200
低通滤波功能:能够降低系统的噪声以及高频振荡
0表示关闭滤波功能
通常设置的范围为:250-1500
SLJFF(1)=1.3 !0
该参数的作用主要是用于降低加速度段以及减速度段的位置误差
通常设置的范围为:0.5-2
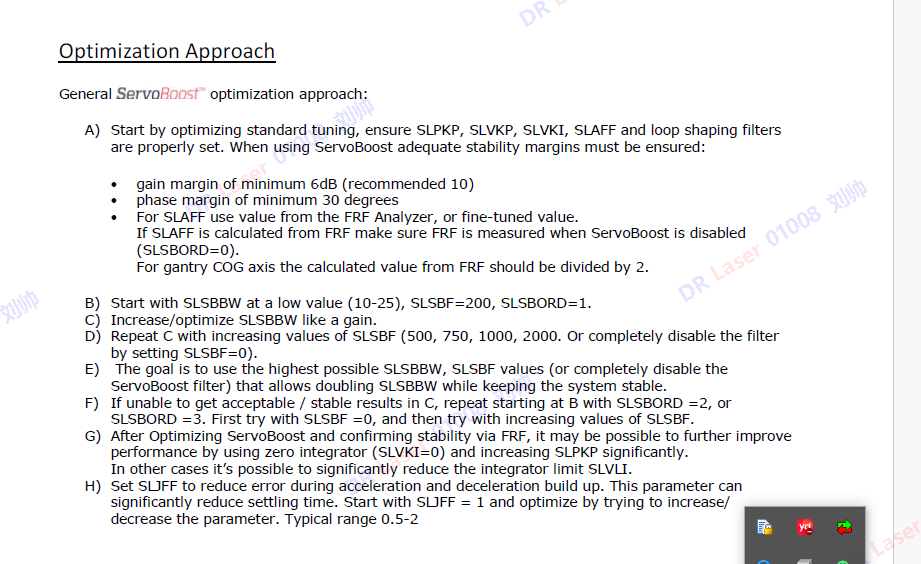
二、ServoBoost算法的使用优化方法
第一步:首先需要确保轴参数的正常配置:确保SLPKP、SLVKP、SLVKA、SLAFF、 loop shaping filters参数的正常配置,确保轴能够较为稳定正常的运行,因为调节ServoBoost算法的时候需要一个足够的稳定性(裕度)
注意:
1、最低需要6db的增益裕度建议能够到10db
2、最小30度的相位裕度
3、对于SLAFF,如果是使用FRF计算得出的值,需要先禁用ServoBoost算法,然后使用FRF来计算SLAFF的值,对于龙门控制来说,FRF计算完的值应当除以2
第二步:
首先调整的参数是 SLSBBW ,设定,SLSBF=200,SLSBORD=1,SLSBBW 参数(10-25)
第三步:
开始逐步增大SLSBBW 参数的值,就像是调节轴的带宽那样,配合示波器观察轴控制精度的变化
第四步:
逐步调节SLSBF参数的值,500、750、1000、2000,或者禁用,配合示波器观察轴控制精度的变化
第五步:
主要实现的目标是 SLSBBW 、SLSBF两个参数的值能够调节到尽可能高的状态,也可以不使用SLSBF=0,但是需要保证系统的稳定性
第六步:
如果前面几步都无法获得较为理想的控制状态,那么就需要调节SLSBORD的参数了,从SLSBORD=1、SLSBORD=2、SLSBORD=3每次该参数变化了就需要重复第二步到第五步的步骤,首先可以将SLSBF的值设定为0然后再逐步增加
第七步
可以调节SLJFF(1)参数该参数的作用主要是用于降低加速度段以及减速度段的位置误差
通常设置的范围为:0.5-2
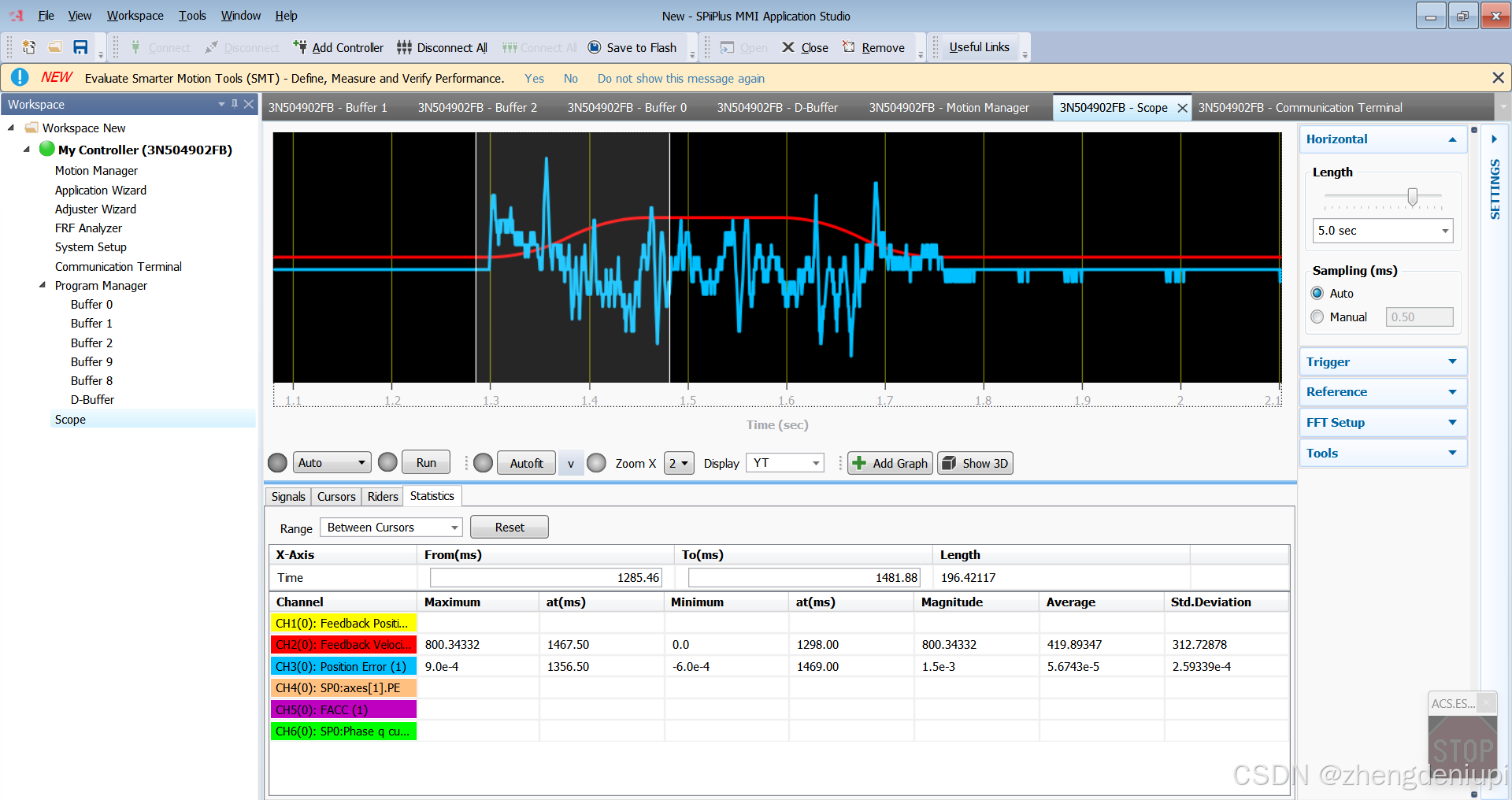
三、算法效果待验证
数据结果
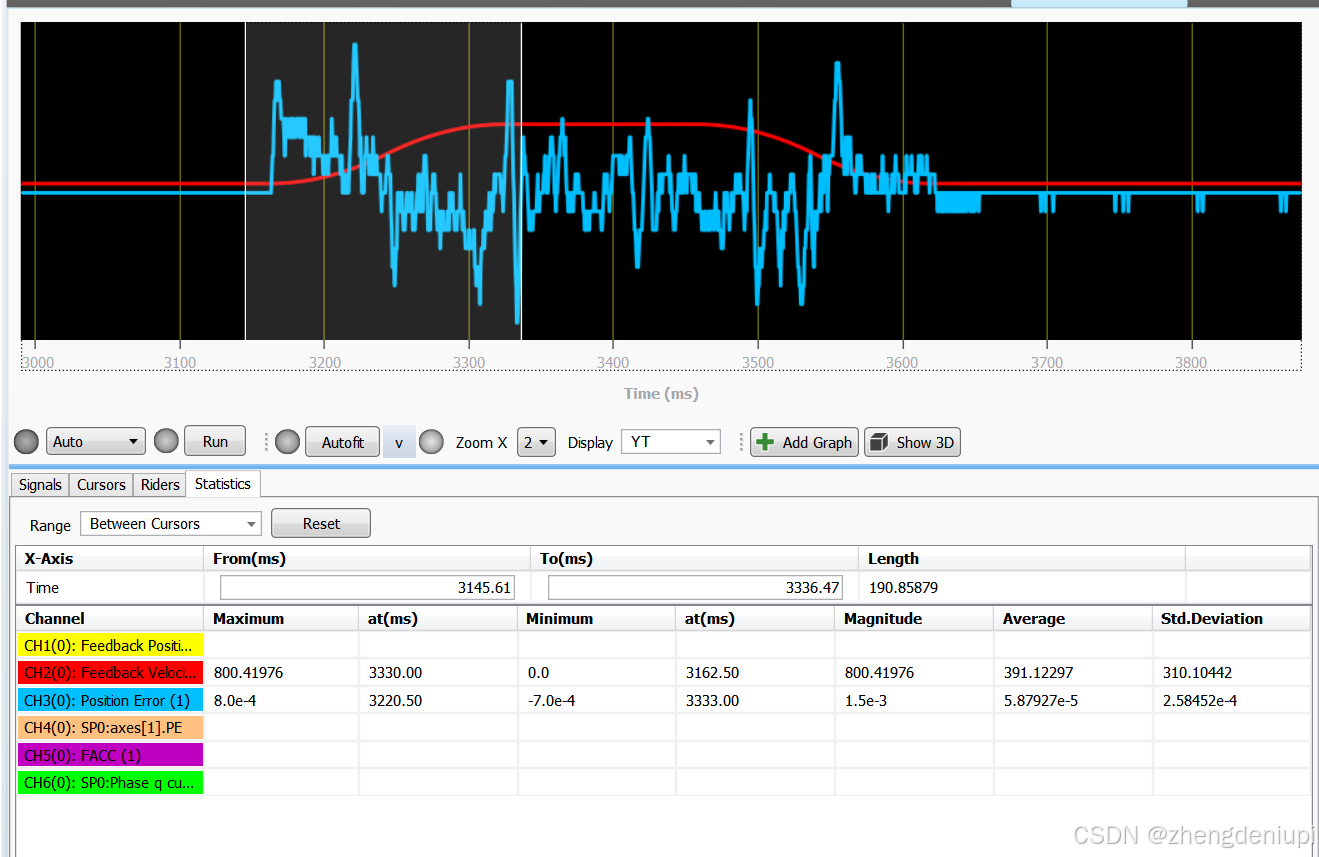
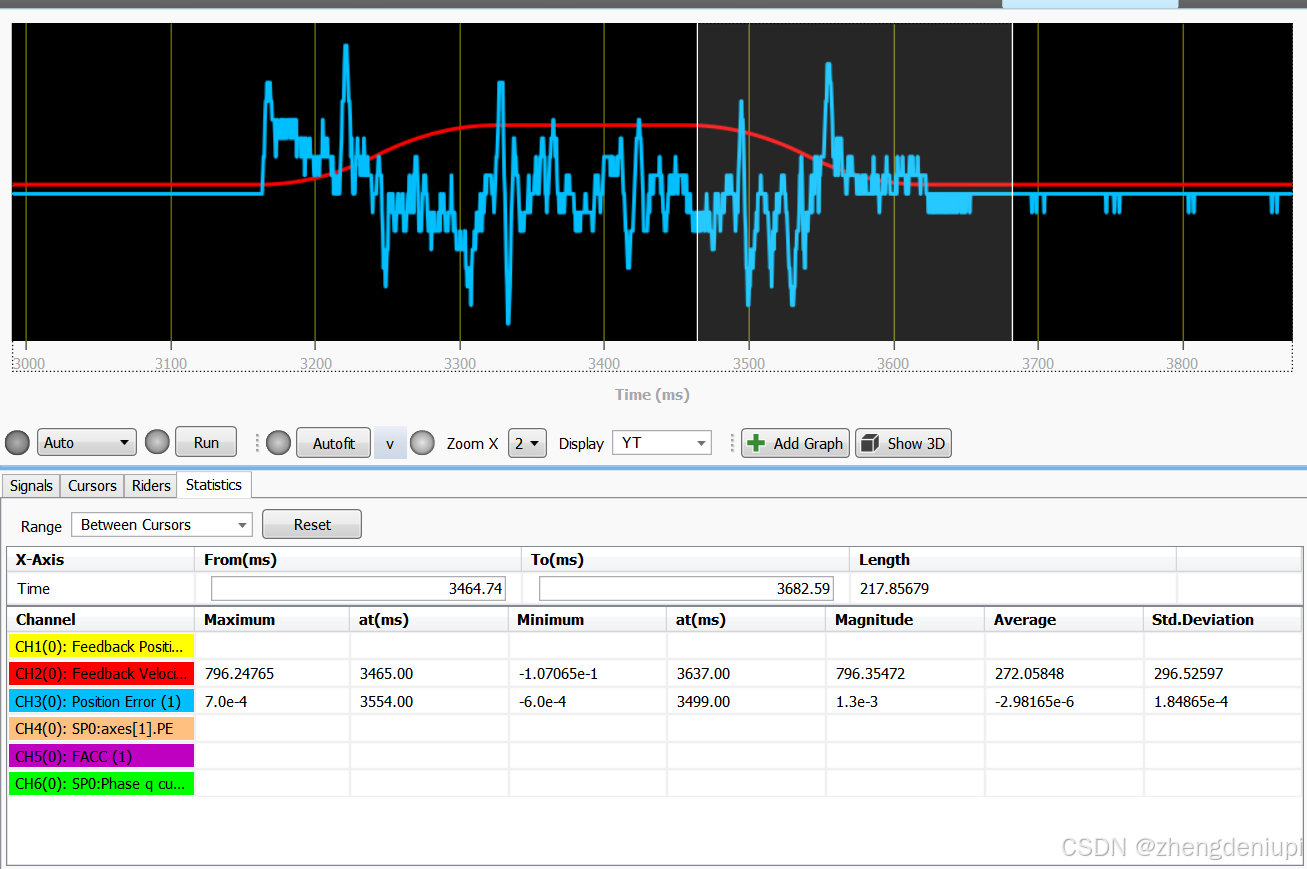
不加算法前:800速度1个G加速度
匀速段
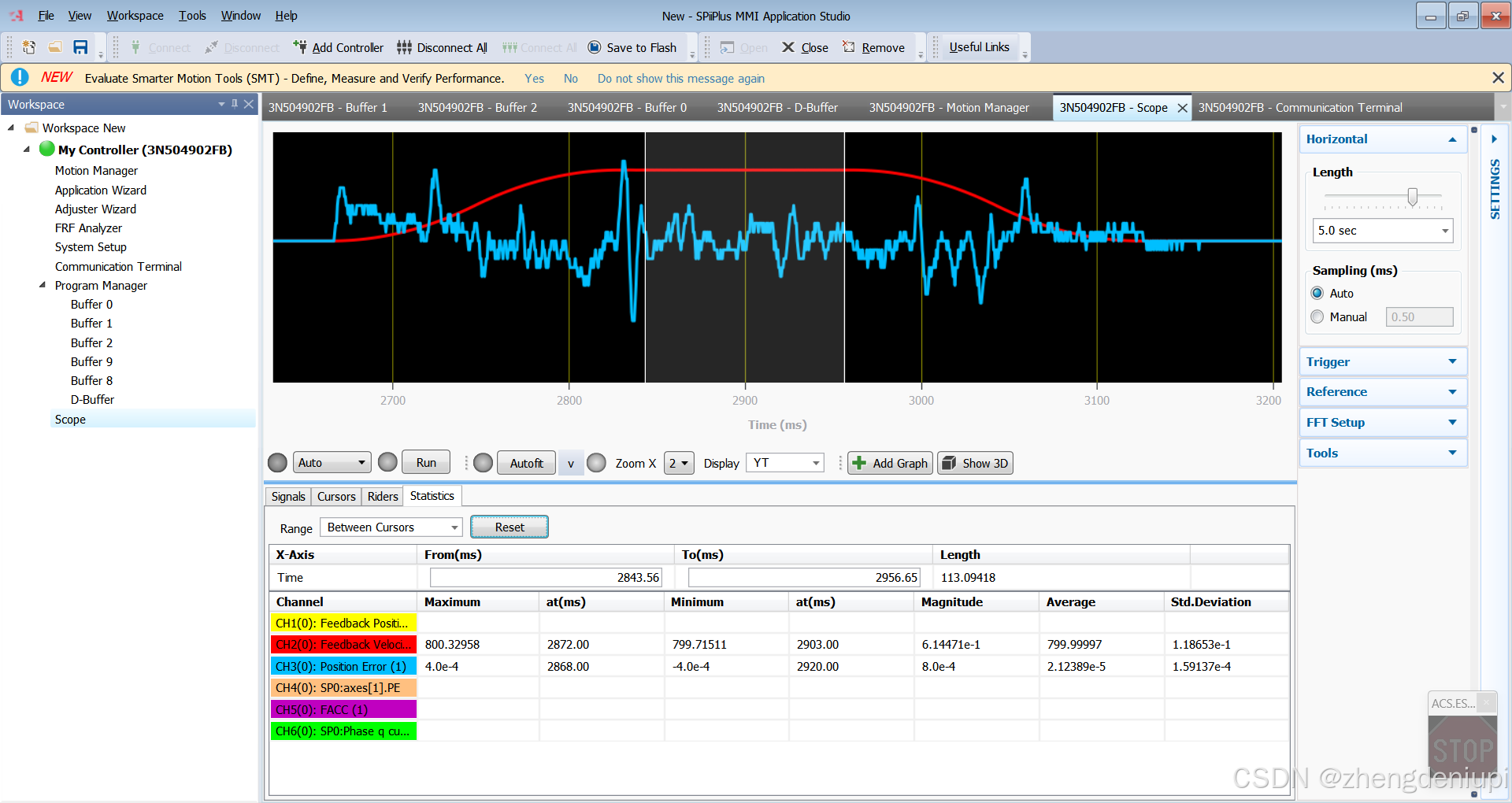
加速段
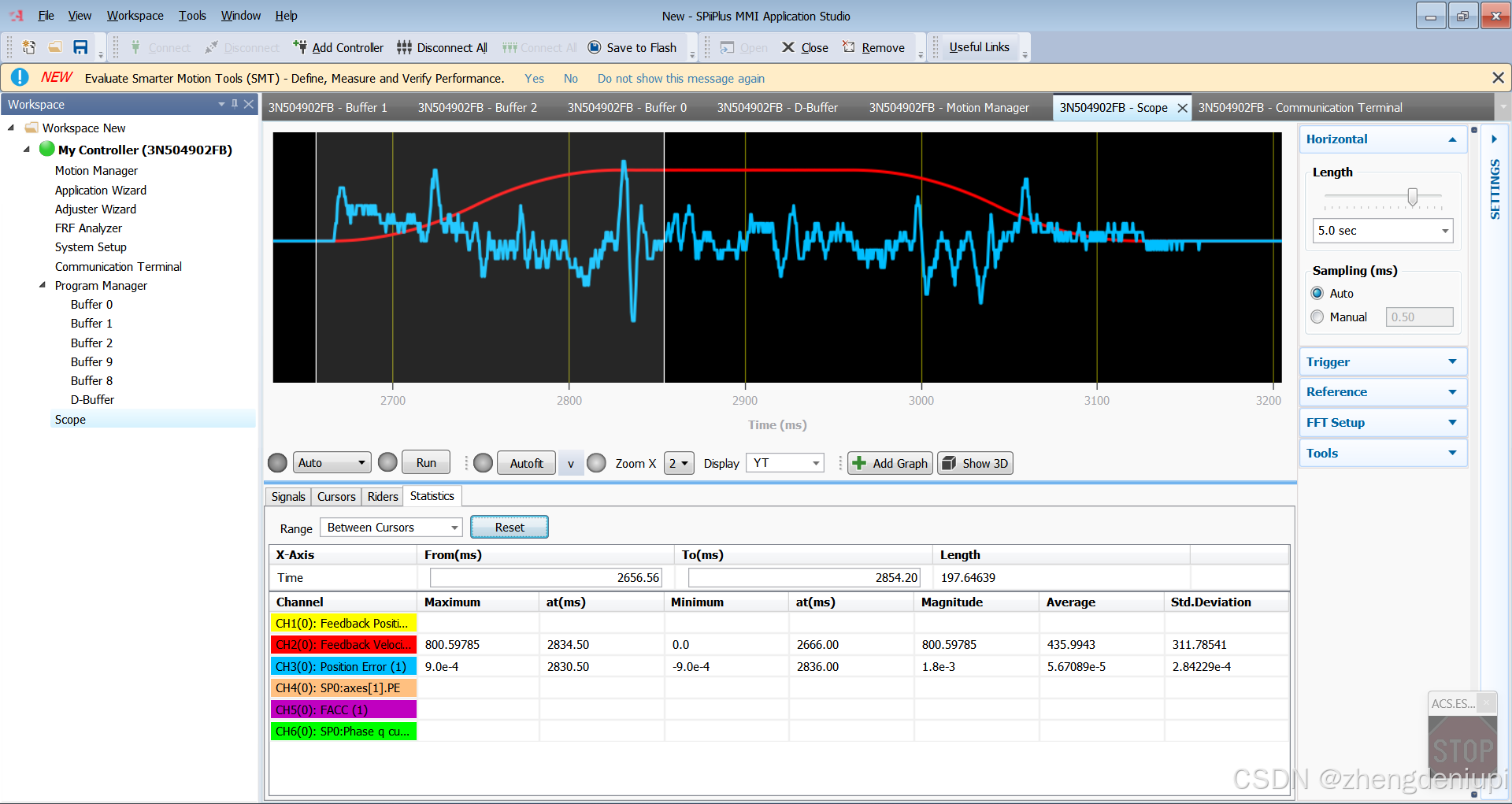
减速段
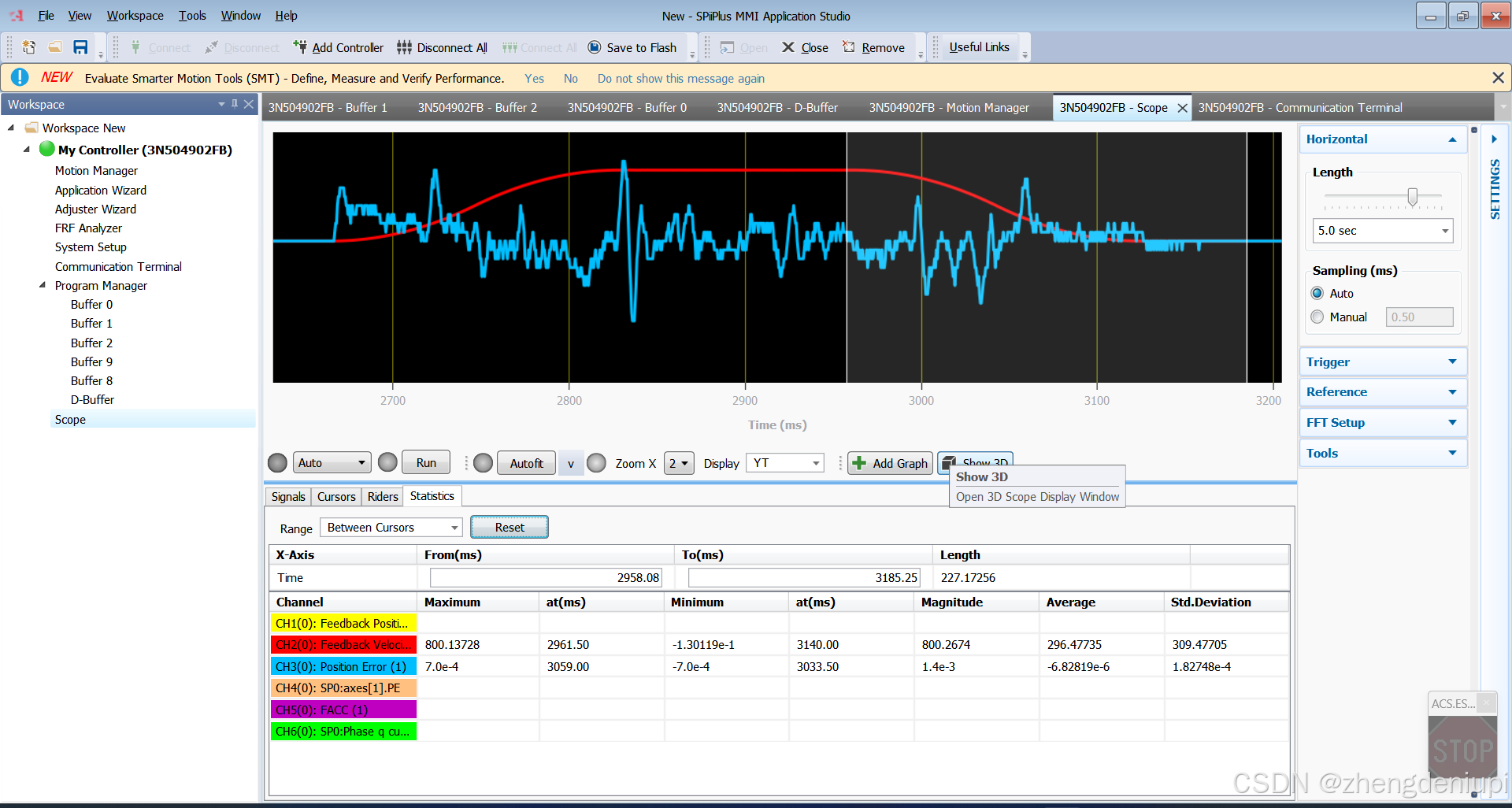
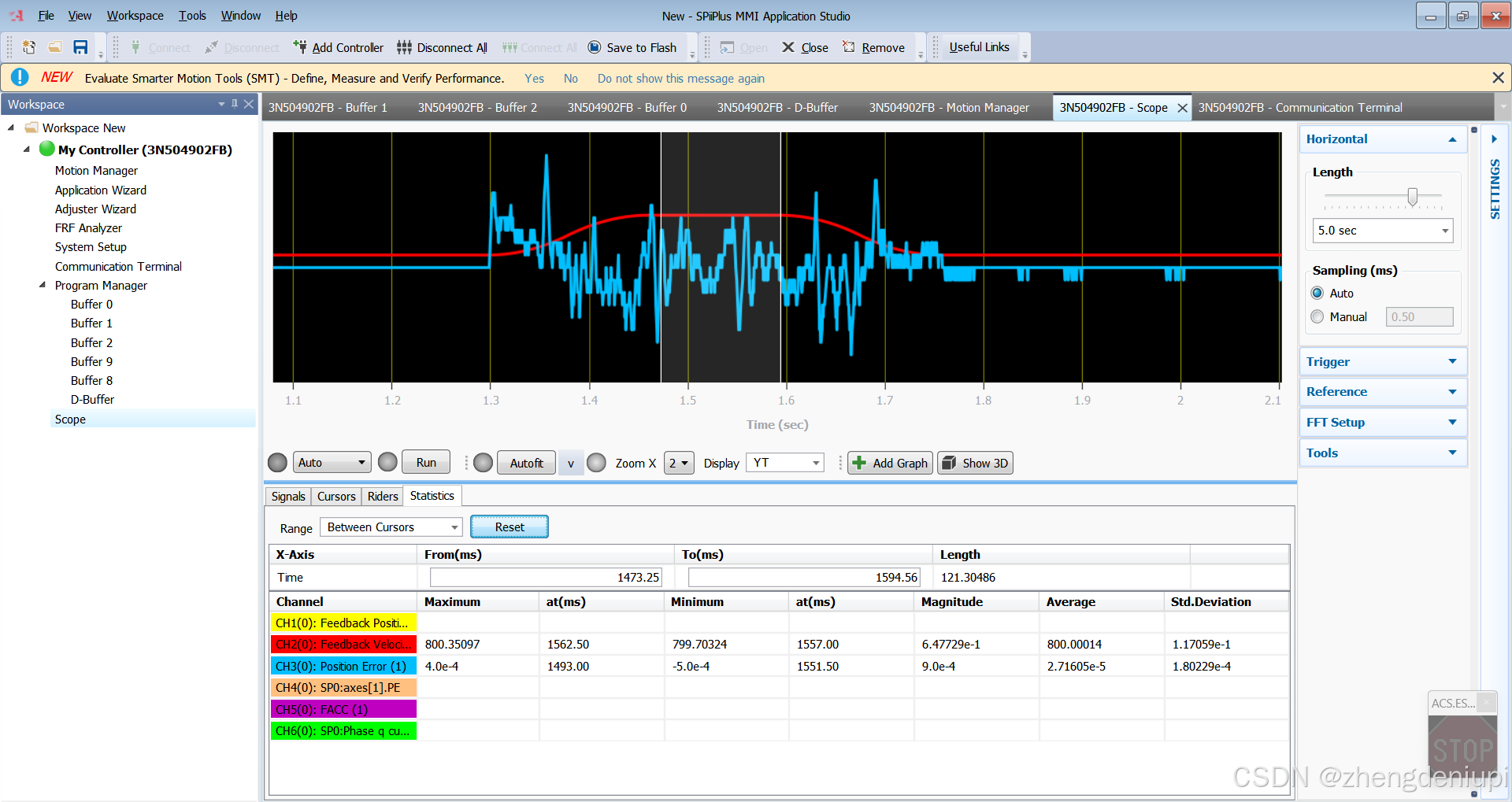
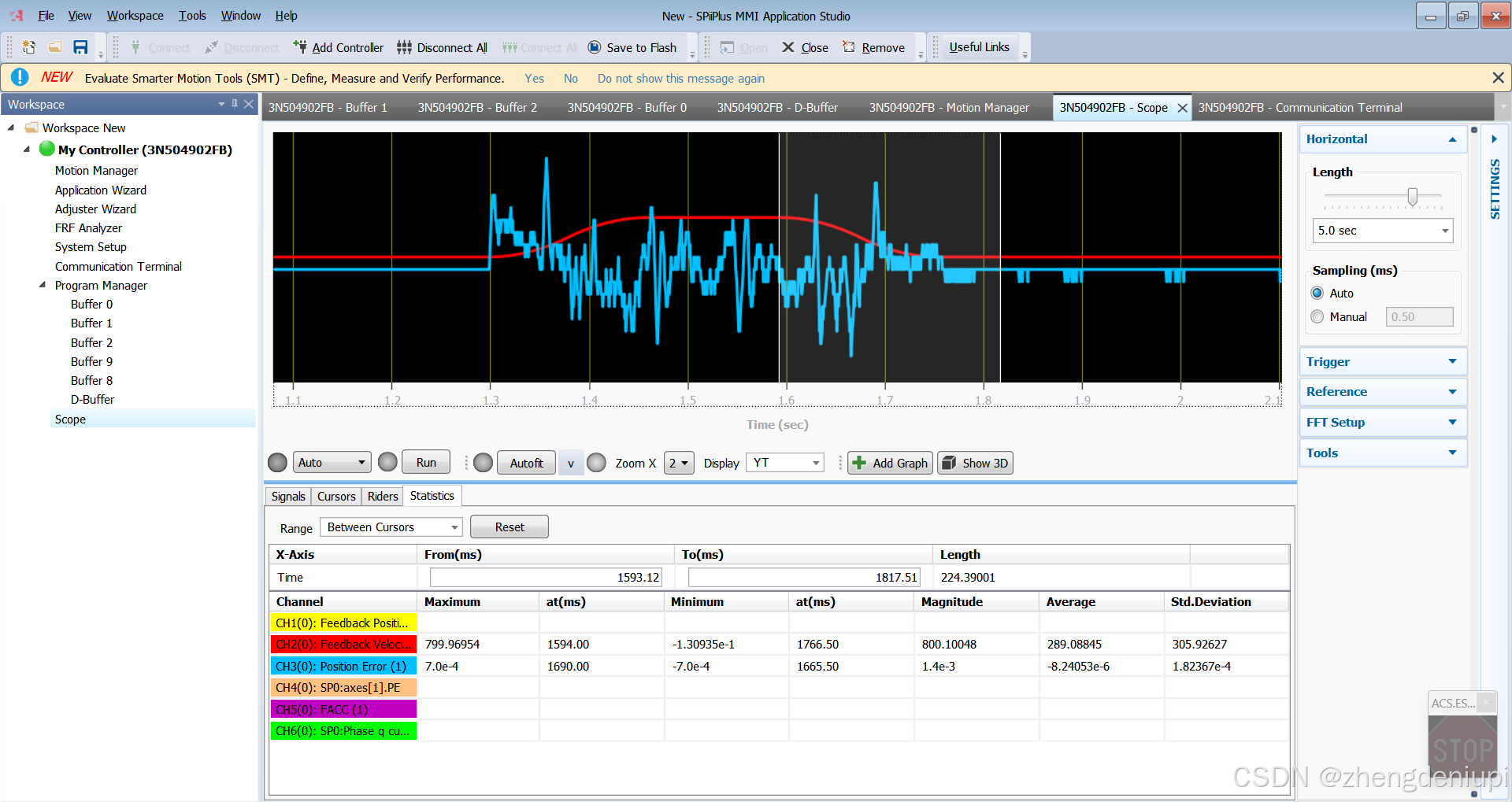
启用算法后:800速度1个G加速度
匀速段
加速段
减速段
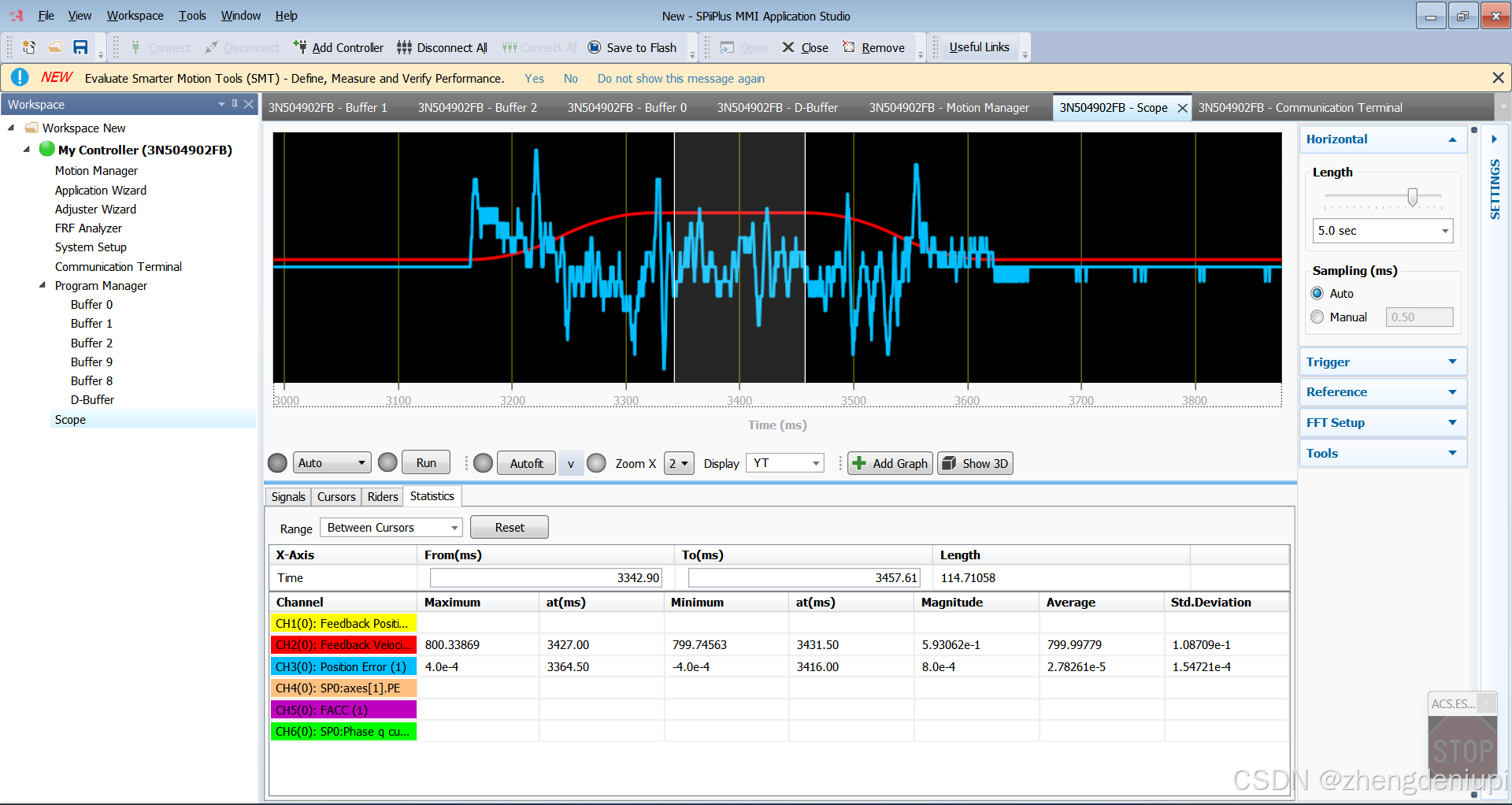
启用算法后:800速度1个G加速度
匀速段
加速段:
减速段:
总结
该ServoBoost算法功能是ACS控制器内部的可选项,能够优化控制器对轴控制精度(包括加速减速段的位置误差、匀速段的位置误差、以及匀速段的速度波动等),需要根据轴的应用场景(控制精度)来进行选择是否使用该算法。


















 546
546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









