






到目前为止,在世界范围内还没有一个统一的智能机器人定义。大多数专家认为智能机器人至少要具备以下三个要素:一是感觉要素,用来认识周围环境状态;二是运动要素,对外界做出反应性动作;三是思考要素,根据感觉要素所得到的信息,思考出采用什么样的动作。智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”。在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系。最主要的是,这样的计算机可以进行按目的安排的动作。正因为这样,我们才说这种机器人才是真正的机器人,尽管它们的外表可能有所不同。本文就是介绍如何基于qualcomm的Dragonboard410c借助kinect实现智能自动跟随机器人。
一.硬件环境:Dragboard410c+Kobuki底座+kinect传感器

图1 Dragonboard410c

图2 Kobuki底座
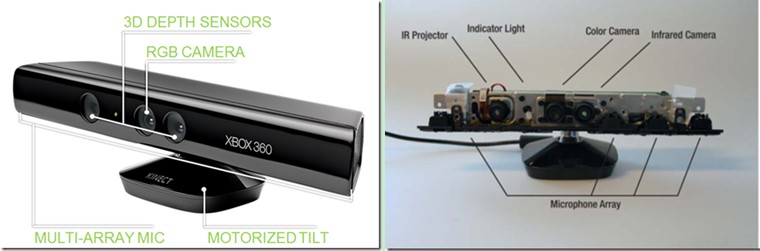
图3 kinect传感器
二.软件环境:Linaro+ROS
此处我们介绍如何快速搭建本设计的运行环境,大家可以先在Dragonboard410c中安装Debian系统,再通过网络下载以下三个关键的安装文件到根目录下。
下载地址:
http://builds.96boards.org/releases/dragonboard410c/linaro/rescue/latest/dragonboard410c_bootloader_emmc_linux-*.zip
http://builds.96boards.org/releases/dragonboard410c/linaro/debian/latest/boot-linaro-jessie-qcom-snapdragon-arm64-*.img.gz
http://builds.96boards.org/releases/dragonboard410c/linaro/debian/latest/linaro-jessie-developer-qcom-snapdragon-arm64-*.img.gz
在根目录下解压这三个文件,并通过fastboot将这几个镜像安装到系统中,安装完成后重启,接键盘到Dragonboard410c中,通过linaro的终端控制台登陆系统,默认的用户及密码都为:linaro。
再运行我们上传的install_ros_410c.sh脚本即可(在本文末尾附录)。
三.整体实物图

图4 turtlebot整体实物图
四.在北京创客盛会的展示过程

图5 单独跟随

图6 队列跟随
















 5245
5245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









