






AEB全解析
附赠自动驾驶最全的学习资料和量产经验:链接
1 什么是AEB
汽车AEB从2002年奔驰、本田、丰田等车企提出理念至今落地量产已经有20来年的历史。
AEB,Autonomous Emergency Braking,其实属于SAE LEVEL 0,为驾驶员提供强制辅助。AEB在检测到潜在碰撞时,主动刹车;如果司机已经踩了刹车,但刹车力度还不足以防止碰撞,它也可以增加制动力。
AEB属于汽车主动安全的一部分,也是辅助驾驶功能中的一项。如果说L3以上的自动驾驶辅助的功能是帮助用户开车的话,AEB是在用户马上要碰撞的时候辅助刹车,这是救命用的。

AEB能提高安全性吗
根据欧洲新车评价规程和澳大利亚新车评价规程于2015年共同发表的《配备AEB系统的车辆在现实中的有效性研究报告》,安装AEB的车辆,在车速小于50km/h时,可减少38%的追尾意外事故。
另一项由美国高速公路安全保险协会和美国公路交通安全管理局联合进行的研究也显示,AEB系统可以将前向碰撞事故的发生率降低50%,并将严重伤害事故的发生率降低56%。
2014年起欧盟新车安全评鉴协会(Euro NCAP)将AEB自动紧急刹车系统列为新车评鉴项目,搭配FCW前车防撞警示系统,经美国高速公路安全保险协会(IIHS)研究,能大幅降低50%以上追撞事故。透过车前雷达及辨识摄影机,当前方有突然冲出或大幅减速的车辆时,除预先警示驾驶外还能加压刹车避免或降低损伤。
乘联会统计数据显示,2023年上市的16万以上新车中,配置AEB功能的占比为67%。

AEB的速度范围
目前,市场上大多数在售车型能在60km/h的车速下实现车对车的刹停。
目前市场上销售的绝大部分车型,都宣称能够做到80km/h以下AEB避撞,与E-NCP、C-NCAP的要求保持了一致。而超过80km/h,目前市场上销售的绝大部分车型车型都不支持AEB避撞,少数一些车型AEB宣传的也是功能上支持,但性能上不保证。至于低速场景AEB,现在的行业标准是触发AEB最低车速大于15km/h就行,主要是因为低速场景的碰撞也不会造成严重的经济损失。
那么决定AEB工作车速的核心是什么呢?是传感器,传感器的感知距离,和系统响应的时间以及制动系统的刹车距离,决定了AEB可以工作的最大速度。
理论上以单目摄像头为核心传感器的AEB系统的工作极限速度为40km/h,单目摄像头+毫米波雷达的AEB工作极限速度为70km/h,双目摄像头AEB的工作极限为90km/h。


AEB原理
通过雷达、摄像头共同监测前方车辆以及行人情况,若探测到潜在碰撞风险,系统将采取相应预警及制动措施,从而避免发生碰撞或减轻碰撞损害程度。
AEB 系统采用雷达测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB 系统也会启动,使汽车自动制动,从而为安全出行保驾护航。
AEB通过车载传感器获取环境点云数据。点云数据是由大量离散的三维点组成的集合,表示了周围物体的位置和形状。
基于点云数据,AEB算法对车辆周围的障碍物,如其他车辆、行人或静止物体进行识别。
一旦检测到障碍物,AEB算法会评估车辆与障碍物之间的碰撞风险,包括计算车辆与障碍物之间的相对速度、相对及速度及相对位置等参数。通过这些参数的分析,估算碰撞风险。
基于评估的碰撞风险,AEB在必要的时候向车辆制动系统发送紧急制动指令,减少碰撞的严重成都或完全避免碰撞。


AEB难点
信息采集
因为传感器在不同环境下的工作效率会有较大出入,比如在雨雪天气、雾霾天气等极端天气状况下,信息采集装置甚至可能会完全停摆;信息采集的不准确性就会导致AEB系统可能会出现误差与误判,一是该启动时不启动,二是不该启动时却启动。
算法
AEB系统难以识别静态物体。
在识别到静态物体后,系统一般会直接过滤,以此来减少没有实际意义的预警,也就是误报。因为每一次的误报可能带来的就是一次突然的刹停,影响驾驶体验。
每家车企在AEB上面的表现不同,与算法识别的阈值有着直接关系,算法阈值如果设置过低,就会出现草木皆兵的情况,如果阈值设置太高,又会出现后知后觉的情况。
早期AEB测试,主要集中在前方静止车辆、横穿马路的假人和两轮车。



即便现在智驾方案不断升级,感知从单目到双目,再到摄像头+雷达的融合方案,现实中仍会遇到各种问题。
大部分是出在感知层面,
例如低端车型仅靠摄像头,在暗光、强光、炫光、雨雪天都会受影响,像护栏、自行车这种反射面小的障碍物,可能会被漏掉;
而毫米波雷达虽能避开天气干扰,但又缺乏垂直视场感知,仅能提供平面化的扫描,知道范围内有东西,但不知道是个什么东西,所以对故障车辆也有可能撞上去;
激光雷达兼顾“视觉”和“空间”参数,但它对雨雪、尘土等恶劣环境的抗干扰性依然较差。
这就会造成某些特殊环境下的感知失灵,例如雨雪天、障碍物是静止的、障碍物体积太小,反射面太小等等。
这种情况就需要加强感知系统,所以现在的中高端车型基本都是采用融合感知的策略,摄像头+毫米波雷达是主流方案,少数高端车型才会启用激光雷达组合。
AEB系统组成
自动紧急制动AEB(Autonomous Emergency Braking)是一种汽车主动安全技术,主要由 3 大模块构成,其中测距模块的核心包括微波雷达、激光雷达和视频系统等,它可以提供前方道路安全、准确、实时的图像和路况信息。
AEB方案 硬件主要由传感器、控制器与执行器三部分组成。
传感器
目前AEB主流方案采用的环境感知传感器为毫米波雷达和摄像头。
毫米波雷达通过对目标物发送电磁波并接收回波来获得目标物体的距离、速度和角度;
摄像头需要先进行目标识别,然后再根据目标在图像中的像素大小来估算目标距离。


摄像头和雷达是目前应用最多的ADAS传感器,通常用V(video)和R(Radar)来代指摄像头和毫米波雷达,用数字来表明配置的数量。
比如1R1V就是由一个雷达和一个摄像头组成的ADAS系统。通常的配置会有1V、1R、1R1V、3R1V、5R1V以及5R多V。
更多的传感器会带来更多的成本,但肯定对感知的准确率和漏报率指标上有所增益。所以可以初步认为更多传感器的ADAS系统表现会更好。
在摄像头方案里,Mobileye 的摄像头芯片>其他摄像头芯片,Mobileye Q4 > Mobileye Q3,多目摄像头>单目摄像头。
纵向功能ACC、AEB功能的实现,有通过毫米波雷达完成,有通过前视摄像头雷达完成,也有摄像头和雷达融合的方案。
毫米波雷达对于非金属和静态物体识别并不好,单毫米波雷达方案的AEB功能可能对行人,较低车速下的表现欠佳。
而摄像头的方案对于距离判定准确性要差一些。
二者的融合方案能够取长补短,相对更好一些。

控制器
AEB控制器目前多集成在传感器内部(多为毫米波雷达),随着智能驾驶技术的不断发展,AEB控制功能将逐步由域控制器承担。
执行器
目前AEB的执行器均为电子稳定系统(有的主机厂叫ESC,Electronic Stability Control,有的主机厂叫Electronic Stability Program,简称ESP)。
2.1 什么是ESC
ESC系统由传感器、电子控制单元(ECU)和执行器三大部分组成。
典型的汽车电子稳定控制系统在传感器上主要包括4个轮速传感器、方向盘转角传感器、侧向加速度传感器、横摆角速度传感器、制动主缸压力传感器等。
通过电子控制单元监控汽车运行状态,对车辆的发动机及制动系统进行干预控制。电子控制单元与发动机管理系统联动,可对发动机动力输出进行干预和调整。
执行器则包括传统制动系统(真空助力器、管路和制动器)、液压调节器等。
在汽车高速行驶或者快速转向的时候,汽车在向心力的作用下会发生横向的偏移,这种偏移如果过大的话,汽车就会出现打滑,从而可能酿成车祸。

除了ESC外,还有以下功能为制动系统所支持,
牵引力控制系统(Traction Control System,TCS)
定速巡航系统(Cruise Control System,CCS)
自适应巡航控制系统(Adaptive Cruise Control,ACC)
电动助力转向系统(Electric Power Steering,EPS)
防抱死制动控制系统(Anti-lock Braking System,ABS)
电子制动力分配系统(Electronic Brakeforce Distribution,EBD)
电子控制制动辅助系统(Electronic Brake Assist,EBA)
自动紧急制动系统(Autonomous Emergency Braking,AEB)
2.3 AEB相关法规
乘用车AEB有一份推荐性国家标准GB/T 39901,推荐意味着厂家生产的车型是可以没有AEB功能的。
虽然国家标准没做强制要求,但是中汽中心会定期对新车的安全性进行评价,就是C-NCAP。C-NCAP评价内容中除了各种正碰、侧碰、后碰过程中对乘员和弱势道路使用者(Vunerable Road User,VRU)的保护能力,还包括对主动安全功能的评价,其中就包括AEB。
对一些主打智能、中高端的车型来说,激烈的市场竞争中,已经不能满足于获得C-NCAP“五星”,而开始追求“五星”里的更高分。在此背景下,AEB不俗的分数占比,也就自然而然成为兵家必争之地。
GB/T 39901
首先给出了一些性能要求,随后针对性能够要求给出了一些测试要求,主要性能要求可以归纳如图。
对于静止的物体,要求车辆以30km/h的速度行驶,不发生碰撞即为合格;移动目标则要求车辆在50km/h的速度行驶时,不发生碰撞即为合格。
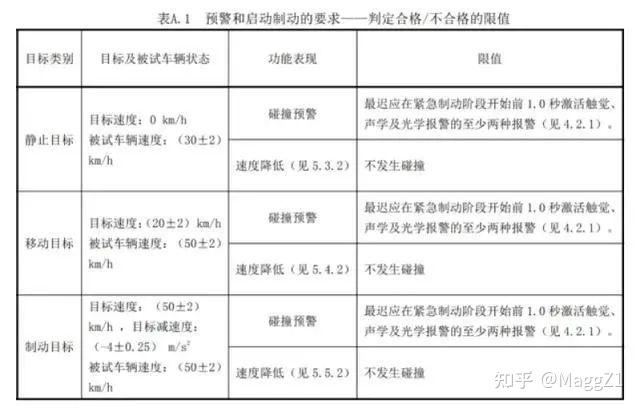

可以看出,GB/T 39901将AEB拆分为两个子功能:碰撞预警和紧急制动,每个子功能的主要性能要求如下:
(1)对于静止/移动/制动的车辆目标,碰撞预警最迟应在紧急制动开始前1s发出,且应采用声学、触觉及光学中的两种方式预警,这个过程速度下降不应超过15km/h或被试车辆速度的30%中的较高者
(2)对于静止/移动/制动的车辆目标,紧急制动不应在预计碰撞时间3s前开始,此过程制动减速度不应小于4m/s2。
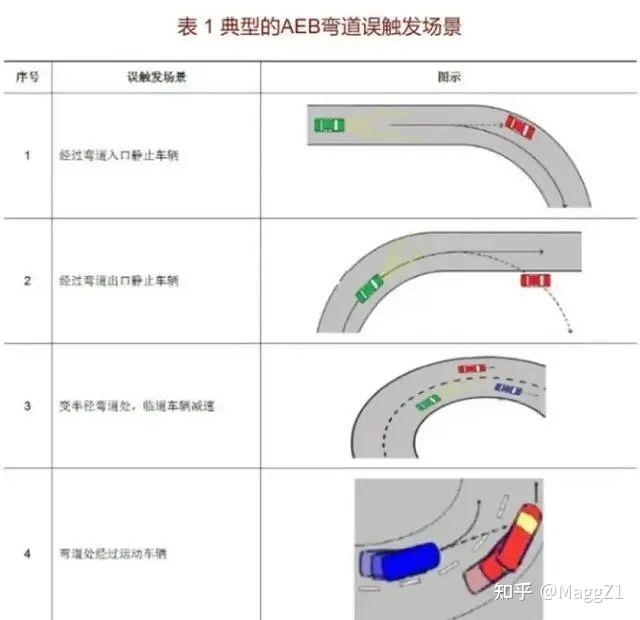
针对性能要求,GB/T 39901中给出了两类测试内容:一类是正响应测试,一类是误响应测试。
(1)正响应试验内容见图3,对于静止、运动和制动的目标车辆,自车分别以设定的速度及距离开始测试,测试过程预警方式,速度减小量,预警及碰撞开始时间及最终避免碰撞,视为测试通过。
(2)误响应试验内容包括两个试验项,一个如图4,自车以50km/h的恒定速度从两辆静止的目标车辆中间通过,另一个自车以50km/h的恒定速度从一块厚度10m的铁板上方通过,试验过程自车不发出碰撞预警,不进行紧急自动,试验通过。
C-NCAP
C-NCAP的评价内容和GB/T 39901中一样,都包含正响应测试和误响应测试两类。
正响应测试包含对车辆目标,行人目标和两轮车目标的测试。
(1)针对车辆目标的正响应测试内容如表1,包括目标车静止CCRs(Car to Car Rear Stationary)场景、高速追尾(High Speed Car to Car Rear)、交叉路口直行C2C SCP(Car to Car Straight Crossing Path)场景、有遮挡交叉路口直行C2C SCPO(Car to Car Straight Crossing Path with Obstruction)场景、交叉路口转向CCFT(Car to Car Front Turn Across Path)场景。在所有场景里,紧急碰撞(AEB)测试速度最高只有40km/h,碰撞预警最高测试速度达到了120km/h。
(2)针对行人目标的正响应测试内容如表2,包含车辆碰撞中心行走的行人CPLA-25(Car to Pedestrian Longitudinal Adult)场景、有遮挡情况下车辆碰撞远端成年行人CPFAO-25(Car to Pedestrian Farside Adult with Obstruction)场景、有遮挡情况下车辆碰撞近端儿童行人CPNCO-25(Car to Pedestrian Nearside Child with Obstruction)场景、车辆左转碰撞近端成年行人CPTA-LN-25(Car to Pedestrian Left Turning Nearside Adult)场景、车辆左转碰撞远端成年行人CPTA-LF-25(Car to Pedestrian Left Turning Farside Adult)场景、车辆右转碰撞远端成年行人CPTA-RF-25(Car to Pedestrian Right Turning Farside Adult)场景。在此系列场景中,包含了一个夜晚无路灯场景下只开近光灯的碰撞中心行走的行人场景,这比2021版C-NCAP要严苛许多。
(3)针对二轮车目标的正响应测试内容如表3,包含有遮挡情形下车辆碰撞近端电动自行车CBNAO-50(Car to Electric Bicyclist Nearside Adult with Obstruction)场景、有遮挡情形下车辆碰撞远端踏板式摩托车CSFAO-50(Car to Scooter Farside Adult with Obstruction)场景、车辆碰撞纵向行驶电动自行车CSFAO-50(Car to Electric Bcyclist Longitudinal Adult)场景、车辆碰撞纵向行驶电动自行车CBLA-25(Car to Electric BicyclistLongitudinal Adult)场景、车辆左转碰撞近端踏板式摩托车CSTA-LN-50(Car to Scooter Left Turning Nearside Adult)场景、车辆右转碰撞近端踏板式摩托车CSTA-RN(Car to Scooter Right Turning Nearside Adult)场景。
针对二轮车目标的正响应试验内容误响应试验包含10个测试场景,如表4所示,此部分相比C-NCAP 2021也是新增的内容。


















 4162
4162











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









