






无感FOC
基于DSP28335平台的无感FOC算法
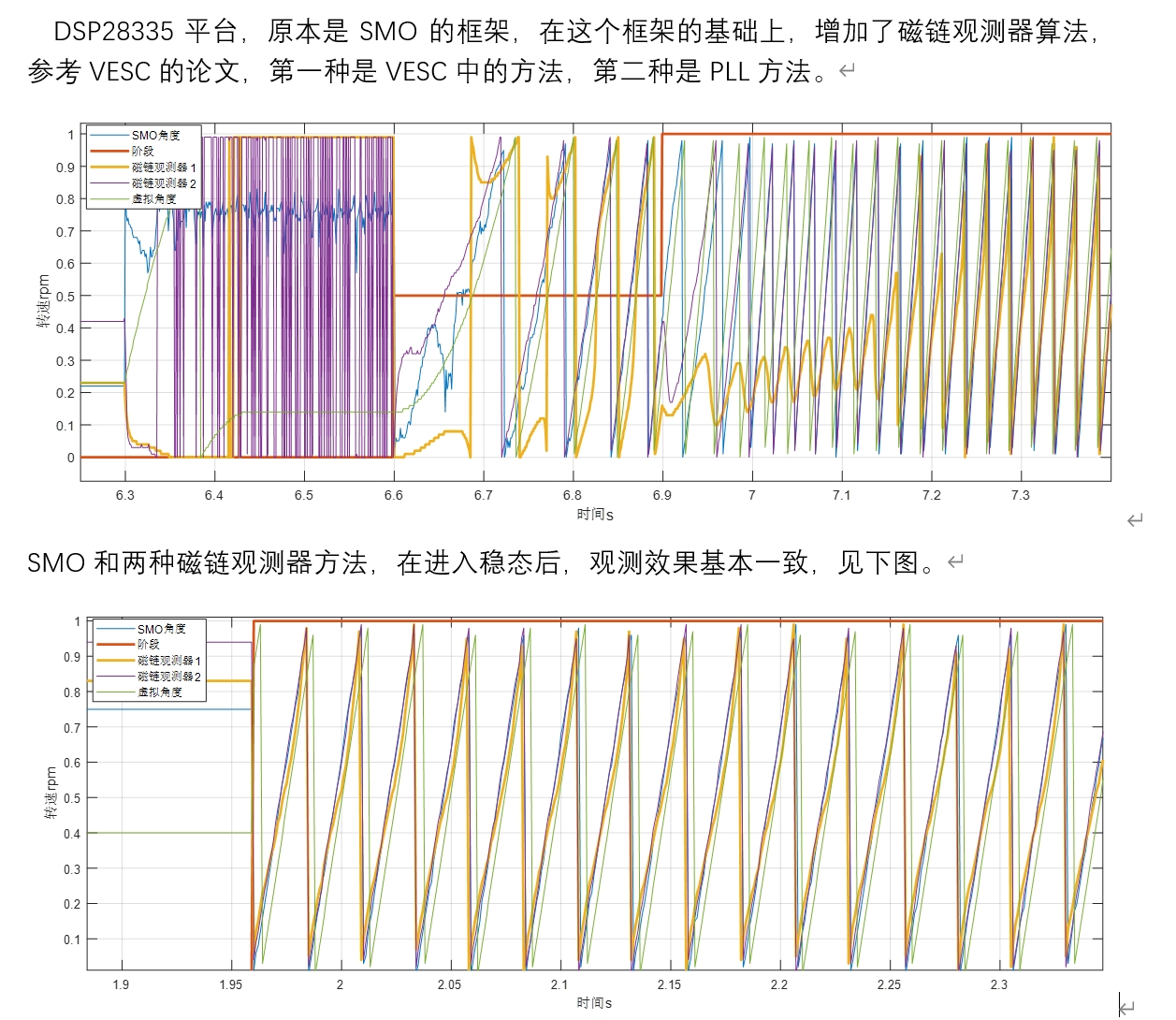
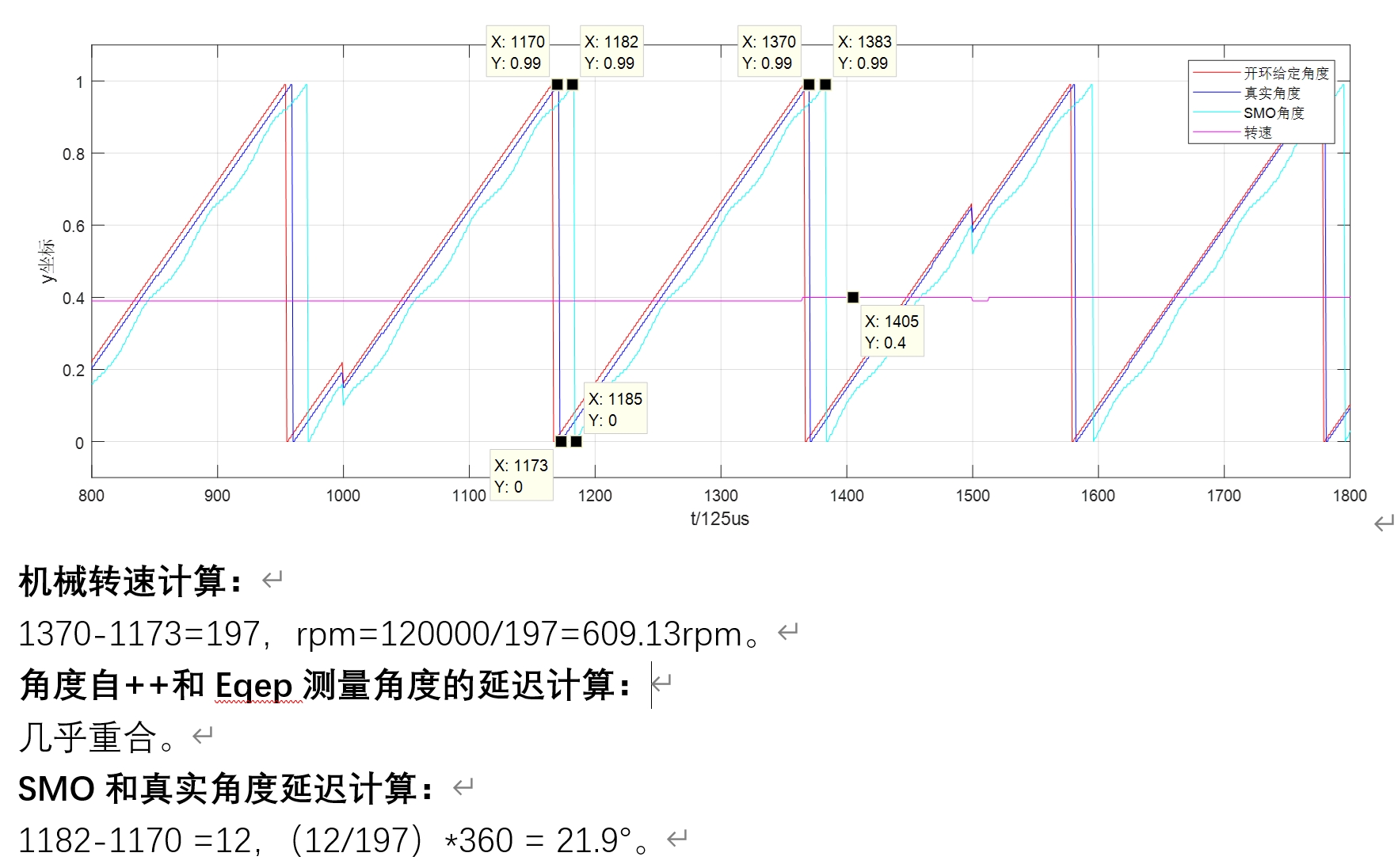
代码包括了完整的矢量控制算法,在smo的基础上,增加了VESC原始的磁链观测器,还增加了磁链观测器+PLL方案,还增加了增量编码器的接口代码,方便大家调试无感算法。
每个环节都是在实物上跑过的,转子位置角度通过全局变量设置进行任意的切换,算法之间相互独立的。
带算法对应的仿真模型。
带算法对应的详细的lunwen,为我本人亲自翻译,另外代码移植、调试不易
ID:63200678973388309
宸哥电子

无感FOC是一种基于DSP28335平台的无感觉矢量控制算法。该算法代码包括了完整的矢量控制算法,通过在SMO(Sliding Mode Observer)的基础上,增加了VESC(Vedder Electronic Speed Controller)原始的磁链观测器,并添加了磁链观测器+PLL(Phase-Locked Loop)方案。此外,还增加了增量编码器的接口代码,以方便开发人员调试无感算法。
在该算法中,各个环节都是在实物上进行了验证,转子位置角度通过全局变量设置进行任意的切换,保证了算法之间的相互独立性。同时,还提供了仿真模型,配套算法的详细论文。
需要注意的是,代码的移植和调试并不容易。在移植过程中,需要根据实际硬件平台进行相应的调整和优化。在调试过程中,还需要对各个参数进行适配和微调,以确保算法的稳定性和性能。
无感FOC算法的核心思想是通过磁链观测器来实现转子位置的估计,从而实现对电机的精确控制。通过磁链观测器+PLL方案,可以更准确地估计磁链的大小和相位。而增量编码器的接口代码,则提供了一种备选方案,可以在没有磁链观测器的情况下,通过增量编码器来获取转子位置信息。
在设计和实现无感FOC算法时,需要考虑到电机的特性、控制策略以及硬件平台的限制。在本次的开发中,我们选择了DSP28335平台作为开发环境,该平台具有高性能的处理能力和丰富的外设接口,可以满足无感FOC算法的实时性和精确性要求。
在论文中,我们详细描述了无感FOC算法的原理和实现细节,包括磁链观测器的设计原理、PLL方案的实现方法以及增量编码器接口代码的开发过程。同时,我们通过仿真模型进行了算法的验证和优化。
综上所述,无感FOC算法是一种基于DSP28335平台的高性能控制算法。通过引入磁链观测器和PLL方案,以及增量编码器的接口代码,可以实现对电机转子位置的精确估计和控制。我们在论文中详细介绍了算法的原理和实现细节,并提供了相应的代码和仿真模型,以帮助开发人员更好地理解和应用该算法。在实际的代码移植和调试过程中,需要根据实际硬件平台进行相应的优化和适配,以确保算法的稳定性和性能。
【相关代码 程序地址】: http://nodep.cn/678973388309.html















 1409
1409











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









