







导读
本文将主要介绍BEV+Transformer端到端感知与建模技术在高德各项业务中的应用,如高精地图中地面要素(包含线要素和地面标识)自动化上的具体方案及其演化过程。该方案使用BEV+Transformer技术来实现采集车上不同传感器(包含激光和相机)所得数据在空间和时间层面上信息的融合,以及对采集道路上各地面要素的感知与建模。这些技术手段很好地服务于地图中地面要素的产线需求,为高德地图提高地图制作效率,降低制作成本提供了坚实的技术保证。
一、业务分析
本文将以高精地图为例,分析其核心应用及其存在的挑战。高精地图作为自动驾驶技术发展的重要支撑和基础,可以提高自动驾驶车辆的感知能力、决策能力和控制能力,从而提升自动驾驶的安全性、可靠性和舒适性。目前高精地图中的地面要素主要包含线要素和地面标识两个大类,其中线要素包含车道线和道路边界,而地面标识则包含道路上的各类交通标识,如引导线,斑马线等。对于自动驾驶而言,线要素和地面标识均可用于自动驾驶车辆的定位,而线要素同时也可用于自动驾驶车辆的路径规划。在高精地图各地面要素的制作过程中主要面临两大挑战:更高的位置精度要求和地面要素本身的识别难点。下面本文将针对这两个挑战分别展开叙述。
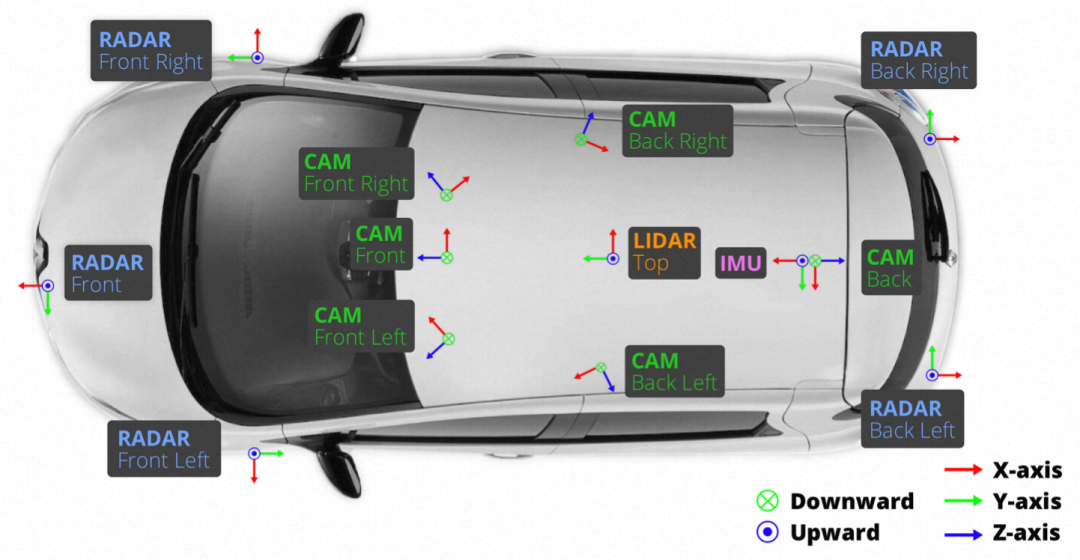
首先是高精地图自身所带来的位置精度挑战。近年来,随着自动驾驶技术从L2往L4方向的推进,对其安全性和可靠性的诉求也逐渐升高。高精地图作为自动驾驶中重要的一环,自动驾驶厂商对高精地图中各要素的位置精度均提出了极高的标准,各地面要素的精度都至少有着厘米级的要求。这种更高的位置精度要求,是高精地图相较于普通地图最大的区别,同时也使得其制作过程有着更大的困难和挑战。为了应对这一挑战,高精采集车配备了多种传感器,其中激光传感器用于采集道路上的点云数据,相机传感器用于采集道路上的图像数据。下图展示了Nuscenes数据集采集车设备安装方式以供参考,并非高精车设备实际安装方式:
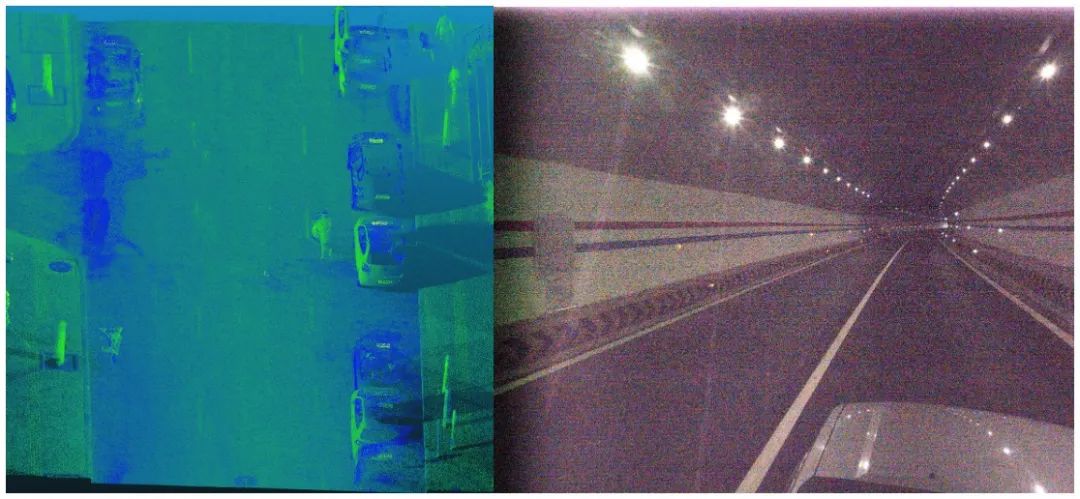
其次是高精地图中地面要素本身的识别难点。正如上文所述,地面要素包含线要素和地面标识,它们自身种类繁多,且在内容,形状和尺寸上均存在较大差异,这为感知模型得到全而准的结果带来了识别难度。此外,采集所得数据中包含的地面要素往往存在较多磨损和遮挡的情形,主要原因有两个:一个是地面要素因长年未修,本身存在磨损,另一个是采集过程中,由于遮挡,环境改变等因素会导致激光的反射率存在差异或可见光不清晰等情形,进而导致采集得到的点云数据和图像数据的质量参差不齐。下图分别展示了激光采集过程中点云磨损的情形,以及相机在隧道里采集时图像不清晰的情形:
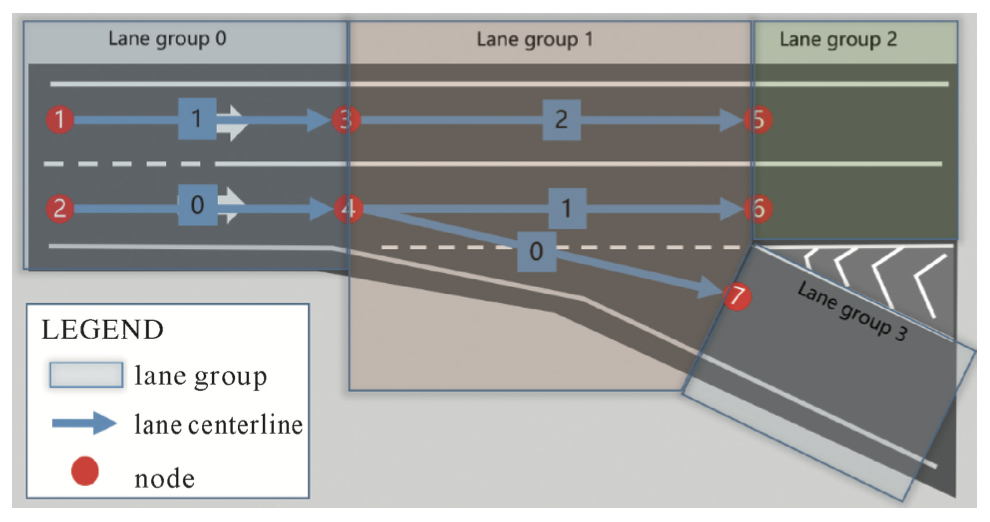
此外,不同于地面标识在局部区域内独立存在,线要素在跨局部区域之间还存在关联关系,高精地图需要构建线要素的全局拓扑,并对线要素属性变化以及几何变化处进行打断,如下图所示。因此如何保证线要素在跨局部区域之间的平滑性并获取线要素精确的属性变化位置是更好的构建全局拓扑的重要一环。
为了应对这些挑战,本文引入BEV+Transformer技术来融合多传感器的数据并实现采集道路上各地面要素更鲁棒的感知和建模,具体细节将在下文给出。
二、BEV+Transformer技术概述
高精地图中地面要素的制作需要准确的感知和建
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 93
93

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









