







 本文介绍了高德在高精地图中地面标识自动化识别的技术发展历程,包括传统方法、深度学习时代的R-FCN、级联检测器、局部回归、角点检测、分割精修以及3D点云识别等,旨在解决识别种类繁多、磨损遮挡等问题,提高位置精度和召回率。目前技术已实现99%以上的定位精度和召回率,助力高精地图产线效率提升。
本文介绍了高德在高精地图中地面标识自动化识别的技术发展历程,包括传统方法、深度学习时代的R-FCN、级联检测器、局部回归、角点检测、分割精修以及3D点云识别等,旨在解决识别种类繁多、磨损遮挡等问题,提高位置精度和召回率。目前技术已实现99%以上的定位精度和召回率,助力高精地图产线效率提升。
思路
本文将主要介绍高德在高精地图地面标识识别上的技术演进,这些技术手段在不同时期服务了高精地图产线需求,为高德地图构建高精度地图提供了基础的技术保证。
1. 地面标识识别
地面标识识别,指在地图道路中识别出各种类型的地面标识元素,如地面箭头、地面文字、时间、地面数字、减速带、车距确认线、减速丘、人行横道、停止让行线、减速让行线等。这些自动化识别结果将作为生产数据交付给地图生产产线,经过制作后演变成服务于自动驾驶、车载导航、移动导航的地图。
高精地图一般对各个地图要素精度至少有着厘米级的要求,所以相对于普通地图来说需要更高的位置精度,这也是与普通地图识别的最大不同,所以探索如何将地面标识识别得又全又准是我们一直努力的方向。
地面标识识别有两大难点:一是地面标识本身的种类、大小繁多,二是地面标识易被磨损遮挡,清晰度参差不齐,这给高精度识别带来了巨大的挑战。
1)地面标识种类繁多:实际场景中地面标识种类繁多,在内容、颜色、形状、尺寸等方面均有不同分布。
颜色:比如黄色、红色、白色等
形状:箭头形、各种文字数字形状、条形、多条形、面状、丘状等
尺寸:国标定义的标准箭头长度为9m,但也存在1m~2m甚至1m以下的地面标识元素,尤其减速带以及人行道等尺寸差异会更大,反映到图像中像素个数以及长宽比均会有较大差异。
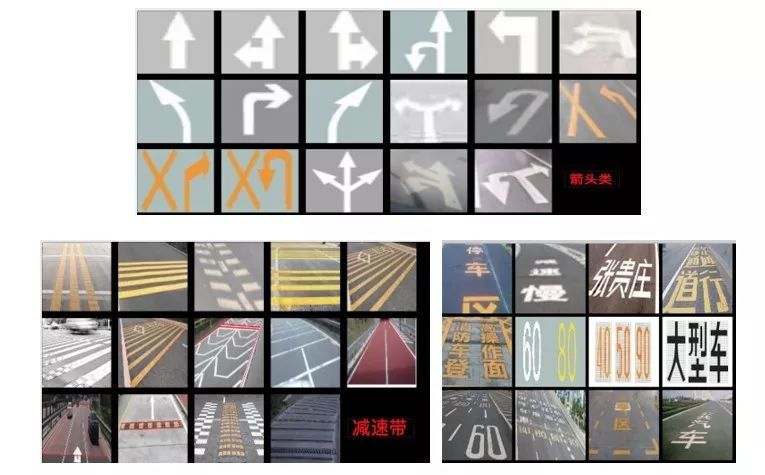
图1. 部分地面标识
2)磨损压盖多:地面元素长年累月受车辆、行人等碾压会造成磨损,以及经常存在的堵车等场景更是加大了地面要素被遮挡的可能。所以从激光雷达获取的点云数据和由相机获取的可见光图像数据的质量均参差不齐,对地面标志识别带来了极大的挑战。
常见的问题如下所示,示例如图2所示。
地面标识磨损:地面标志由于磨损褪色、掉漆导致不完整或者严重不清晰
采集环境问题:遮挡(施工、车辆)、由于环境改变引起的材料激光反射率差异以及可见光不清晰(雨天、逆光等)

图2. 自然场景下拍摄的地面标识
2. 识别起步
地面标识识别需要做的是将地面标识这部分区域提取出来,则最直观的是对其进行阈值分割、骨架提取、连通域分析等传统方法。首先获取点云中地面点集合,接着获取集合中高反射率部分的骨架集合,然后对每个局部骨架区域计算强度截断阈值,最后对区域进行连通区域搜索以及附加降噪措施等。
另外我们也尝试了GrabCut等算法在地面标志上的提取,GrabCut算法对前景和背景分别聚类,得到k组类似的像素集合,然后对前景和背景分别进行高斯混合模型(GMM)建模,判断像素属于地面标志还是背景。在提取疑似地面标识区域后,再经过机器学习模型(SVM等)进行细分类以获得更好的识别效果。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 858
858

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









