






点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
第三届“反无人机跟踪”挑战赛(3rd Anti-UAV Workshop & Challenge)近日公布了比赛结果,来自北京航空航天大学的Colalab与军事科学院的Y-Zheng Wang团队从国内外近60支参赛队伍中脱颖而出,分别获得挑战赛两个赛道的冠军。
商用小型无人机飞速发展,其相比于载人机而言,具有体积小、成本低、机动性强等优势,可完成一些载人机无法完成的任务,已被广泛应用于航拍、监控、遥测、勘探、救援、物流等诸多领域。然而,也有不法分子利用无人机对敏感区域进行侦查/监视或携带危险物品/武器对重要人物进行毁伤。近来国内外多次发生无人机非法入侵事件,不仅对公民的个人隐私与生命财产安全造成了严重危害,而且对机场、军事基地、大型集会现场、核电站、政府机部门驻地等敏感区域的安防造成了极大威胁。因此,开展复杂环境下低慢小(无人机)目标智能感知的研究,从而对无人机进行有效的探测和监管,具有重要意义。
传统的无人机检测与跟踪计算机视觉研究缺乏动态环境下的高质量基准。为了缩小这一差距,我们依托CVPR 2020组织了首届“反无人机”研讨会&挑战赛,发布了由160个视频序列(包括RGB和红外)组成的数据集。这次研讨会吸引了全世界研究人员的注意。许多提交的解决方案优于基线方法,为解决反无人机问题做出了巨大贡献。第二届“反无人机”挑战赛(ICCV 2021)将基准数据集扩展到250个高质量、全高清热红外视频序列,涵盖多尺度(即大、小和微小)无人机的多次出现。鼓励参与团队开发能够在热红外视频中高精度检测和跟踪无人机的自动化方法。特别是,可以在复杂环境(例如,被云/建筑/树木遮挡,以及风筝、气球、鸟类等假目标)中检测和跟踪快速移动的无人机的算法。
图1. 不同尺寸无人机展示
今年的赛事与前两届有许多不同,首先,我们扩充了现有数据集规模,并首次放出训练集,以方便参赛者可以更专注于针对模型进行改进。其次,我们首次设置了两个赛道,具体设置如下:
● Track1: 反无人机跟踪。已知第一帧无人机目标的边界框,该挑战赛道需要算法通过预测边界框来跟踪每一帧视频中的给定目标。当目标消失时,需要给出一个不可见的标记(没有包围框)。
● Track2: 反无人机探测与跟踪。无人机目标是否在第一帧存在是未知的。该挑战赛道需要算法来检测并跟踪无人机目标,目标出现则预测其边界框。当目标不存在或消失时,需要给出一个不可见的标记(无包围框)。

CVPR 2023 Workshop 第三届"反无人机"挑战赛由魔搭ModelScope社区,阿里巴巴达摩院,蚂蚁集团,中科迪宏等联合推出,赛事发布了高质量、全高清热红外的无人机视频序列,目标推动在复杂环境下低慢小(无人机)目标智能感知的研究,包括反无人机跟踪,反无人机探测与跟踪两个赛道。
挑战赛Track1冠军方法介绍
红外无人机跟踪在现实需求和应用意义方面具有重要性。然而,在复杂背景、小目标和运动模糊等视频数据中,准确识别和定位无人机仍然是一项极具挑战性的任务。当前的计算机视觉算法在无人机目标识别定位能力、抗干扰能力和虚警抑制能力等方面与实际需求相比仍有很大的提升空间。为此,本文提出了一种基于检测跟踪联合的方法。我们的整个过程包括生成检测候选框,通过视频分类调整候选框分数,通过简单的跟踪器连接不同帧之间的候选框,并通过背景建模确定视频中的运动目标。最后,我们额外采用单目标跟踪方法作为后处理来调整结果,以提高无人机目标的识别和跟踪精度。
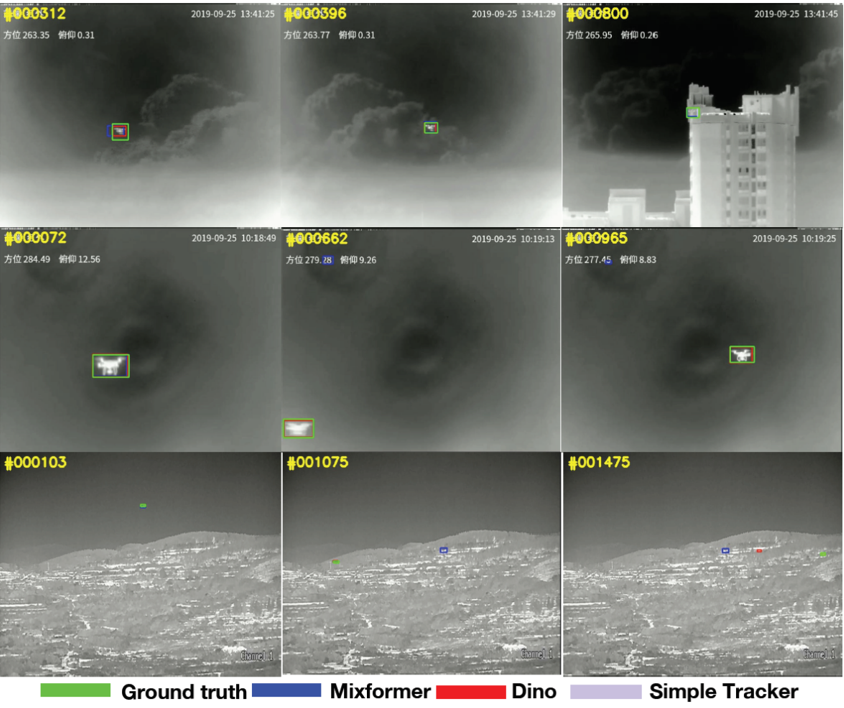
图1跟踪效果

图2跟踪效果
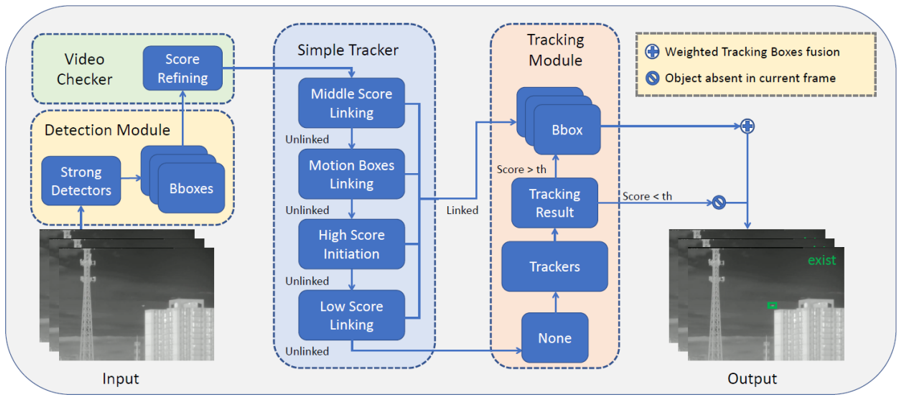
图3 方法框架
冠军团队简介
冠军队成员包含汤宗衡、孙奕帆、刘偲、李波等人。所属单位包括北京航空航天大学与百度科技。其中北航团队来自数字媒体北京市重点实验。该实验室长期从事智能感知、人工智能应用等领域的研究,有多项研究成果的性能明显优于国内外同类系统,并投入实际应用。
挑战赛track2冠军方法介绍
视频红外小目标感知具有重要的现实需求和应用意义。然而,在包含城市、山地或树林等复杂背景的视频数据中准确识别定位小目标仍然是一项极具挑战性的任务。当前以深度神经网络为代表的计算机视觉算法在小目标识别定位能力、抗干扰能力和虚警抑制能力等方面与实用要求相比还有很大提升空间。围绕该问题,通过神经科学与智能科学交叉研究,借鉴生物视觉系统并行加工视觉运动与视觉表观信息的特性,提出了前端视觉运动信息引导的视频小目标检测方法(MG-VTOD)。基于视网膜运动信息提取算法在多帧画面中估计目标运动强度,并将其用于引导图像小目标检测过程;在运动与外观信息融合阶段引入空间注意力机制,有效抑制复杂背景干扰,降低目标检测虚警率。图1展示了MG-VTOD算法在复杂背景下视频小目标检测的性能。



图1 MG-VTOD算法在红外视频小目标检测任务中的输出结果示例(绿色框为真实标注框,红色为算法检测框)
冠军团队简介
冠军队成员Xin Yang、Gang Wang等人来自军事科学院的Yi-zheng Wang团队。该团队长期从事类脑视觉感知和智能光电探测等领域的研究,建立了“神经科学×智能科学”交叉研究范式和全链条研究体系,在生物前端视觉通路计算建模和脑启发目标检测识别等方面取得了一系列创新性研究成果,其中多项已转化实际应用,多次获得省部级以上奖励。
最新CVPR 2023论文和代码下载
后台回复:CVPR2023,即可下载CVPR 2023论文和代码开源的论文合集
后台回复:Transformer综述,即可下载最新的3篇Transformer综述PDF
目标跟踪和Transformer交流群成立
扫描下方二维码,或者添加微信:CVer333,即可添加CVer小助手微信,便可申请加入CVer-目标跟踪或者Transformer 微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer等。
一定要备注:研究方向+地点+学校/公司+昵称(如目标跟踪或者Transformer+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
▲扫码或加微信号: CVer333,进交流群
CVer计算机视觉(知识星球)来了!想要了解最新最快最好的CV/DL/AI论文速递、优质实战项目、AI行业前沿、从入门到精通学习教程等资料,欢迎扫描下方二维码,加入CVer计算机视觉,已汇集数千人!
▲扫码进星球
▲点击上方卡片,关注CVer公众号整理不易,请点赞和在看![]()

















 1378
1378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









