







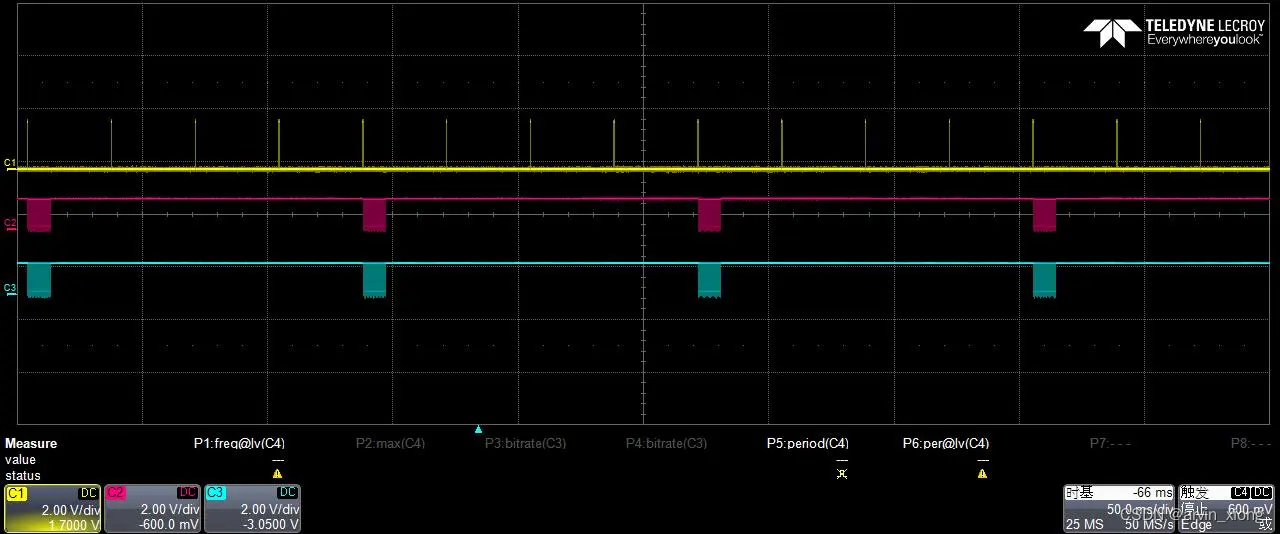
图5, 三个sensor硬件帧同步.jpg
黄色的线是主sensor发送的FSYNC帧同步信号,红色和绿色的线是辐sensor收到FSYNC信号后开始出帧。以主sensor为基准,调节两个副sensor和主sensor的同步。(FSYNC是camera之间的通信和芯片没有关系,同时主摄和辐摄的FSYNC是连在一起的)
注:
1). 主sensor先出帧的,所以副sensor想追上主sensor同步起来,一般需要比master sensor的帧率快一丢丢;
2). 对于硬件帧同步,主和副即使帧率不同,只要是整数倍,也能同步上。如图5,两个slave sensor无非是每4帧和主摄同步一次(主摄30fps, 副摄7.5fps)。
3). 对于软件帧同步,主摄和辐摄的帧率相同的前提下,主摄和副摄的匹配最多有半帧的差距。比如以主图时间为主,肯定是夹在副图时间戳中间的,那么只有两种情况,主图和副图m或m+1帧匹配。无论哪种情况,最多差半帧时间。当n恰好在m和m+1中间时,就刚好差半帧,此时和谁匹配都行。
4). 一般地,主摄和副摄的时间硬件帧同步时间相差控制在200us以内。
5). 要在sensor stream on之前去设置帧同步寄存器。类似地,调节mirror或者flip也是在sensor stream on之前去设置,不可能出帧之后再设置mirror或者flip。
6). 调硬件帧同步,一般需要飞主副摄的mipi data线&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6524
6524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









