






// 介绍 //
车道变换行为是日常行车中最常见的驾驶行为之一,车辆换道轨迹的规划是自主车辆能否安全而又高效地完成换道任务的关键,因此对换道轨迹规划的研究逐渐成为自主车辆技术研究的重点。基于几何的轨迹规划通常采用参数化的曲线来描述轨迹,这种方法较为直观、精确,且运算量较小,因此是目前采用的较为广泛的轨迹规划方法。文中根据换道过程中对换道轨迹平稳性和效率性的要求,基于五次多项式轨迹采样提出了一种考虑驾驶风格的换道轨迹规划方法。
五次多项式轨迹采样
假设车辆沿着车道方向匀速换道,车辆横向位置图片关于时间t的五次多项式为:
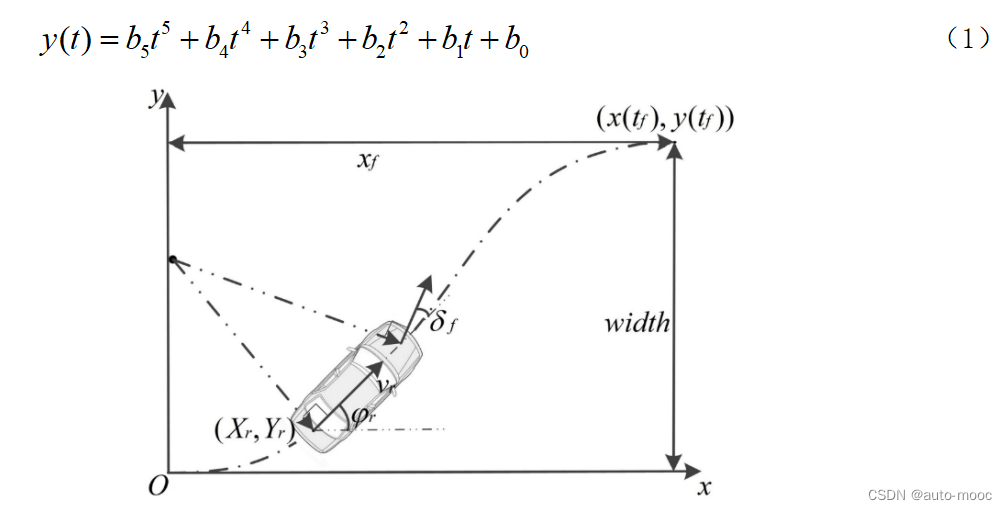
车辆的换道轨迹规划实际上是求解式(1)中的拟合系数bi的值,基于多项式的换道轨迹模型只需获取车辆的初始状态及目标状态,即可通过计算获得换道轨迹。

图片代表道路宽度(一般设为3.5m),d是换道前的横向位置。图片表示变道所花费的时间。可得图片关于图片的六元一次方程组:
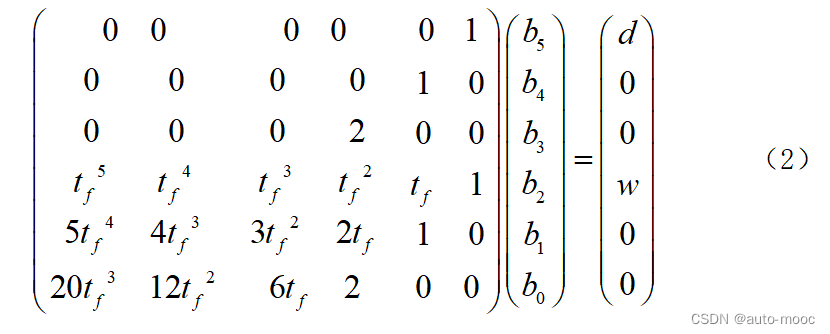
得出五次多项式系数:

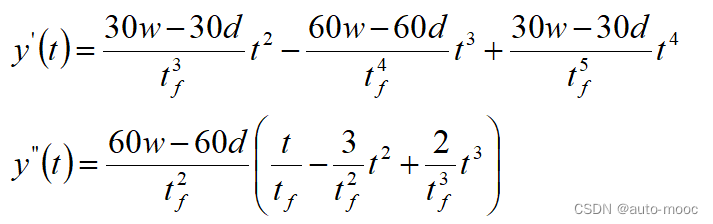
因此可以得到五次多项式的轨迹为:

其侧向加速度表达式为
根据侧向冲击度
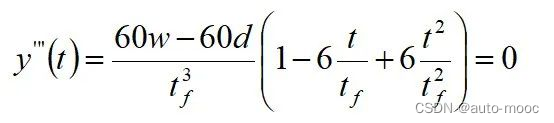
可得侧向加速度的极值点为
,即两个对称的极值点,可近似取为
则最大的横向加速度为
优化目标
考虑以换道时间与最大侧向加速度作为优化目标(其中换道时间反应换道效率,最大侧向加速度反应换道的舒适性及安全性),并进行无量纲处理,即
其中,μg是允许的最大横向加速度,此处可取为μg=4;TL=10s为允许的最大换道时间。则代价函数设为:

根据变道过程中对换道轨迹舒适性和安全性,以及变道效率的要求,所以对横向加速度以及换道时间进行优化,其中k1和k2代表权重系数。利用KKT原理求代价函数的极值点满足
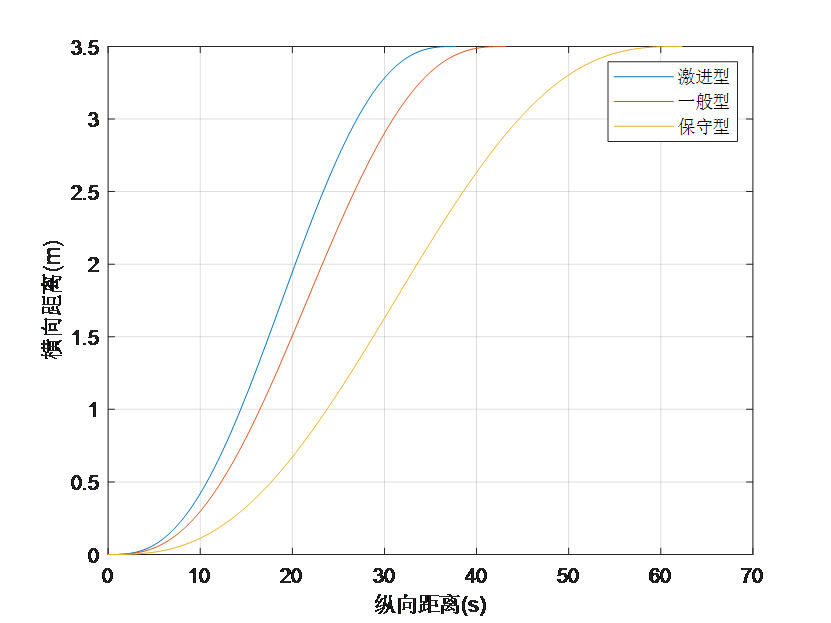
对于不同驾驶风格的智能车辆,不同的驾驶风格对于这两项指标的追求侧重不同,因此加入权重因子,通过调整权重因子来满足不同驾驶风格智能车辆的换道需求。三种典型的驾驶风格所对应的权重因子具体对应:

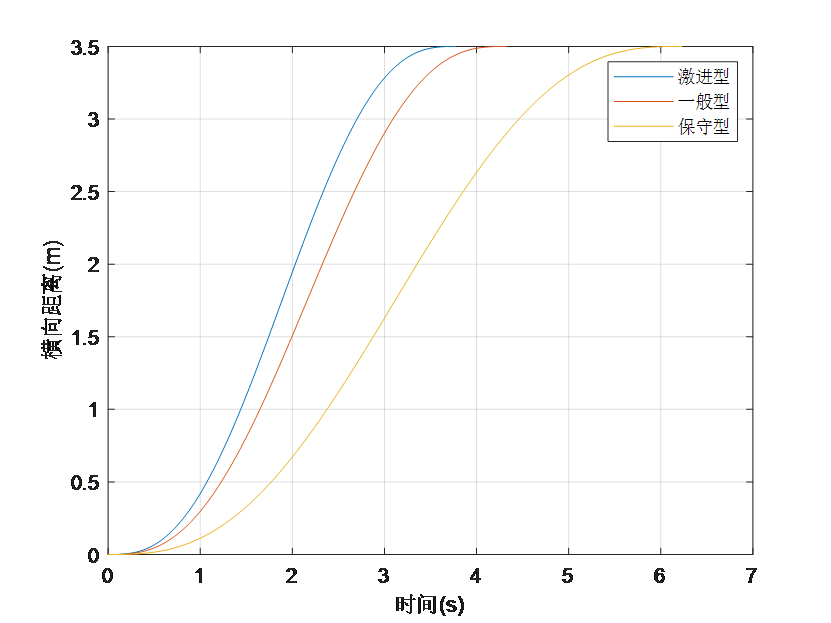
令d=0,道路宽度
,假设车速为10m/s,在matlab中进行仿真,结果如下图所示,不同的驾驶风格完成换道的时间与行驶距离是不同的。
来源:智能运载装备研究所














 1303
1303











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









