







笔者最近捣鼓Simulink,发现MATLAB的仿真模块真的十分强大,以前只是在命令窗口敲点代码,直到不小心敲入simulink,就一发不可收拾。话说simulink的模块化建模确实方便,只要拖拽框框然后双击设置属性就可以慢慢堆建自己的模型,这一点我很中意(*^__^*) 。
最近在学习一些控制理论,发现倒立摆是个不错的学习平台,开始学习肯定需要机构上面的运动学及动力学建模,一直习惯Adams进行运动仿真,但Adams安装比较繁琐。。。便想利用MATLAB代替仿真,顺便学习了解下传说的simulink,直接搜查阅资料。发现Simscape里面的simmechanics就是运动仿真模块。于是赶紧打开俺的MATLAB2015b,敲入simulink再用力敲打回车,就出现如下窗口。。。
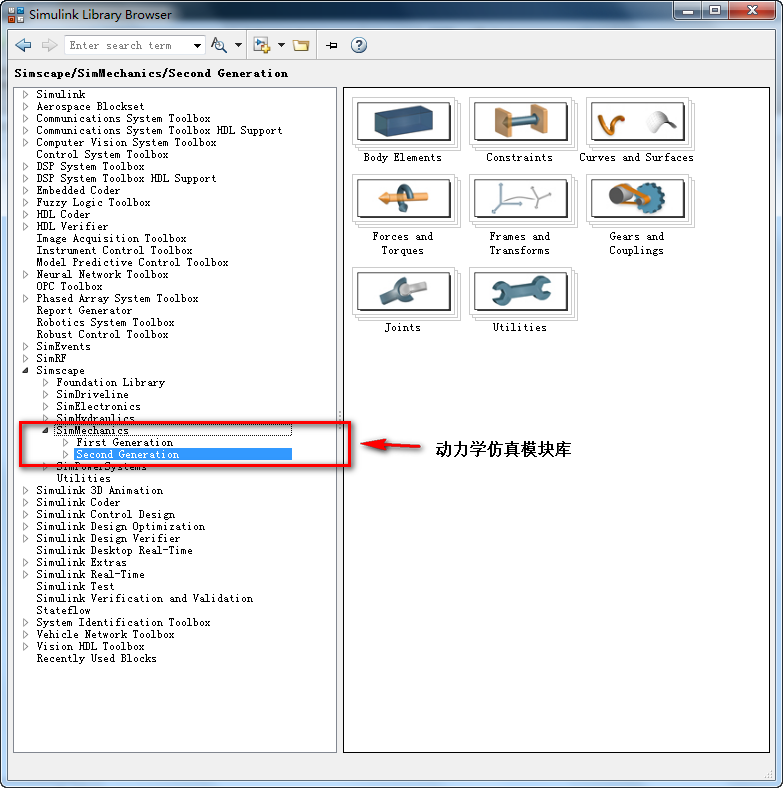
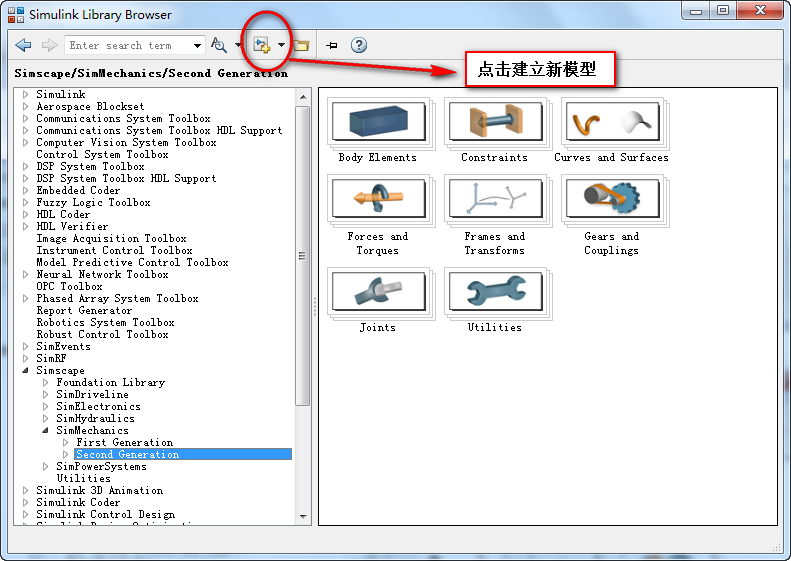
一.新建一个模型New Model
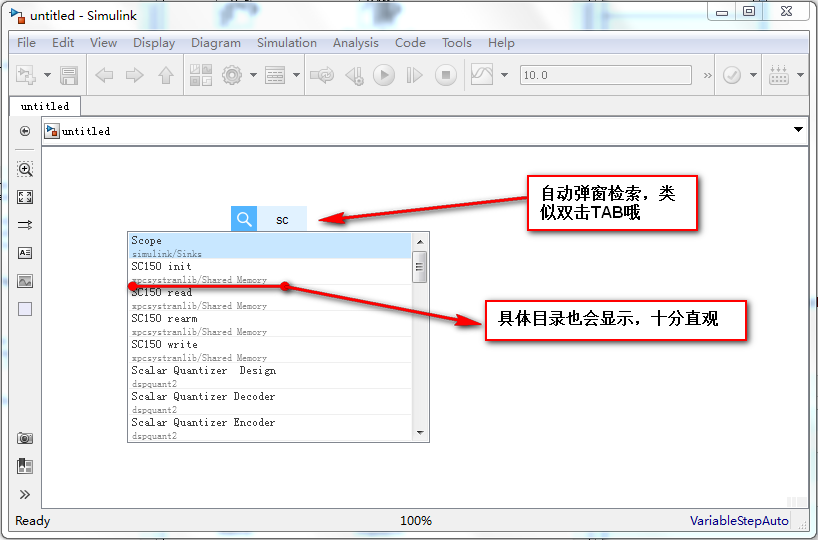
新建模型将出现空白界面,所有建模要用的block都必须拖到该界面进行设置和连接,因为模块库里Block特别的多,一个一个找真的特别麻烦,强烈建议记下常用block的名字,比如示波器scope,时钟clock,阶跃信号step等等等等,今后可以直接在模型空白处敲入字符,自动检索,真的是方便感人,如图。
二.SimMechanics/First Generation模型
需要注意的是,SimMechanics库分为First Generation和Second Generation,即第一代和第二代。
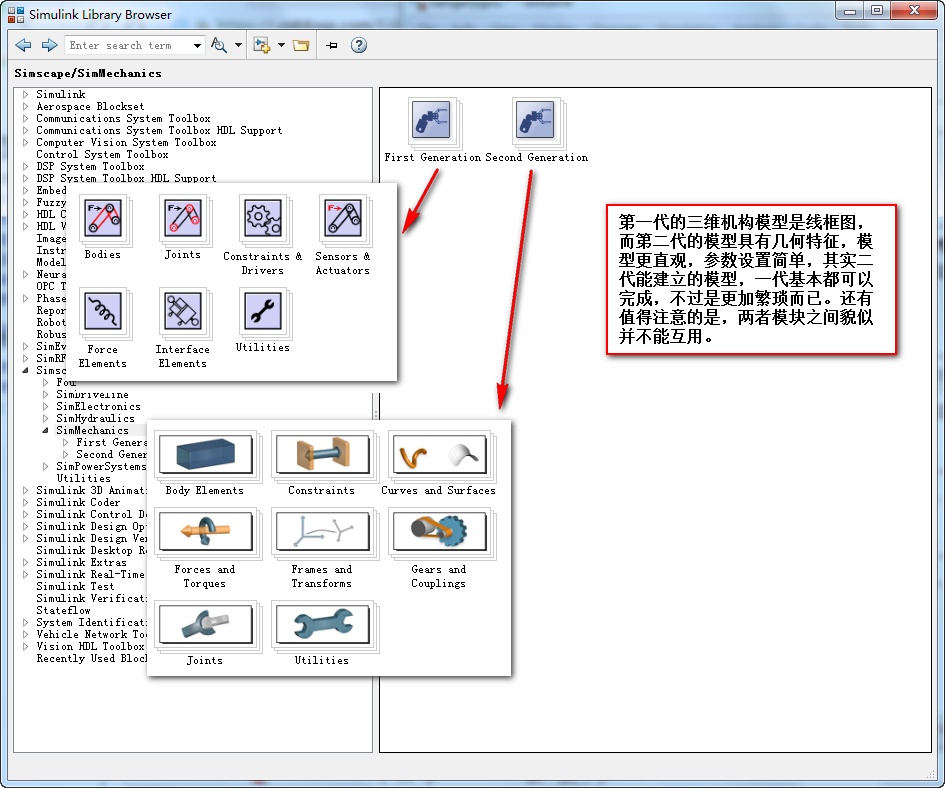
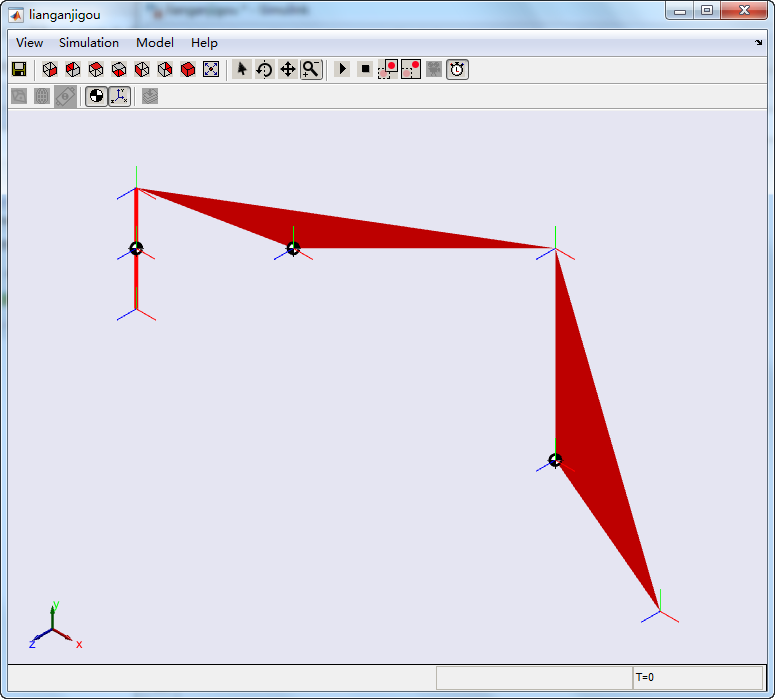
其实MATLAB帮助文档里面很多demo值得学习理解,我简单了解了第一代模块,跟着说明建立了一个平面四连杆机构模型,模块框图和仿真界面如下:
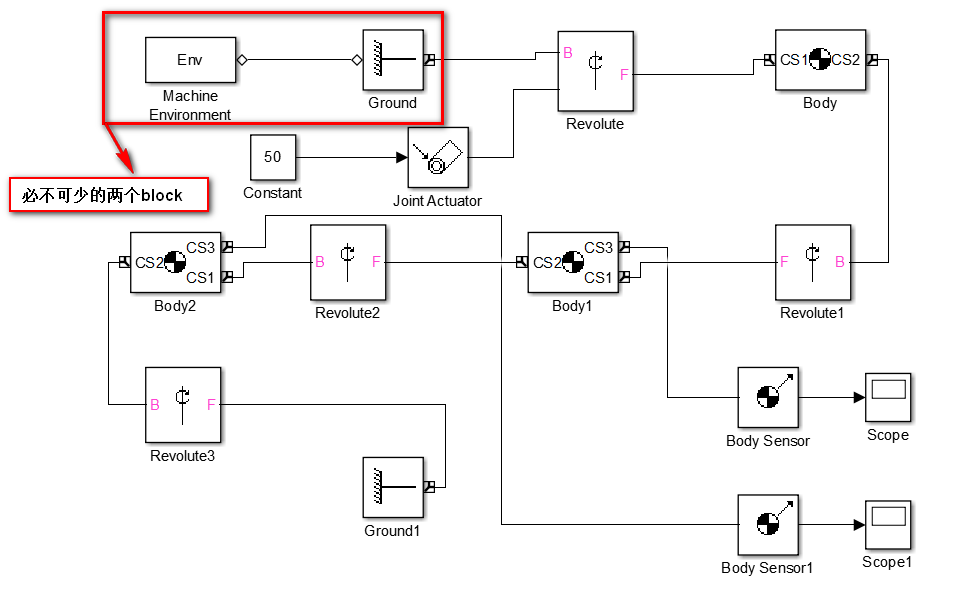
难点就是body block的属性设置,必须清楚了解坐标系的建立,新建的CS(coordinate system)相对哪个坐标平移,又相对哪个坐标旋转。其中World坐标系是世界坐标系,也就是绝对坐标系,所有的坐标系都是相对它而言的,所以说这个模块必不可少。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









