Simscape是一款MATLAB工具箱,用于建模和仿真物理系统。倒立摆是一个经典的控制问题,可以用Simscape来建模和仿真。以下是一个简单的Simscape倒立摆模型的示例:
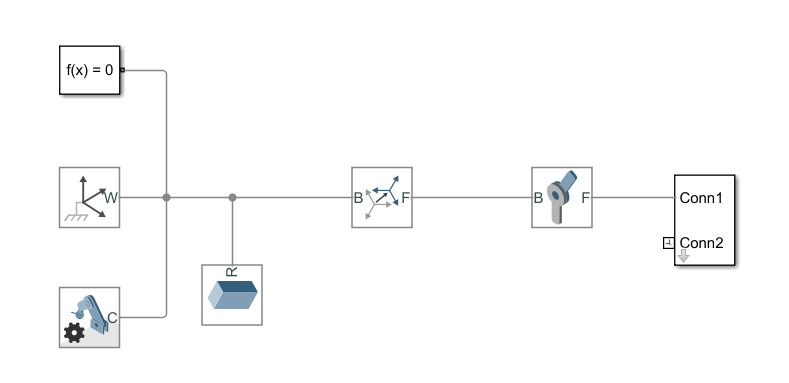
首先,我们需要定义系统的物理特性,包括摆杆的质量、长度、重心位置等参数。然后,我们可以使用Simscape中的旋转连接器来模拟摆杆的旋转运动,使用质量连接器来模拟摆杆的质量。我们还需要添加一个控制器来控制摆杆的运动。
下面是一个示例代码,实现了一个简单的倒立摆控制器:
```matlab
% Define system parameters
m = 0.5; % mass of the pendulum
l = 0.2; % length of the pendulum
g = 9.81; % acceleration due to gravity
% Create the Simscape model
model = createpde(1);
% Add the physical components
pendulum = addComponent(model, 'Simscape/Mechanical/Rotational Elements/Rotational Spring-Damper', [1 1 0], 'pendulum');
mass = addComponent(model, 'Simscape/Mechanical/Translational Elements/Rigid Transform', [0 -l/2 0], 'mass');
gravity = addComponent(model, 'Simscape/Utilities/Physical Signal Sources/Constant', g, 'gravity');
% Connect the components
connect(model, mass, pendulum.P, 'reference');
connect(model, gravity, pendulum.B, 'force');
% Add a controller
controller = addComponent(model, 'Simscape/Electrical/Sources/Voltage Source', 0, 'controller');
connect(model, controller, pendulum.C, 'control signal');
% Set the parameters of the controller
Kp = 100;
Ki = 10;
Kd = 1;
setBlockParameter(model, 'controller/Kp', num2str(Kp));
setBlockParameter(model, 'controller/Ki', num2str(Ki));
setBlockParameter(model, 'controller/Kd', num2str(Kd));
% Simulate the system
tspan = [0 10];
y0 = [0 pi/4 0 0];
options = odeset('RelTol',1e-3,'AbsTol',[1e-3 1e-3 1e-3 1e-3]);
[t,y] = ode45(@(t,y)pendulumModel(t,y,m,l,g,Kp,Ki,Kd), tspan, y0, options);
% Plot the results
figure;
plot(t, y(:,1), t, y(:,2));
xlabel('Time (s)');
ylabel('Angle (rad)');
legend('Pendulum Angle', 'Cart Position');
function dydt = pendulumModel(t, y, m, l, g, Kp, Ki, Kd)
% Extract the state variables
theta = y(1);
phi = y(2);
dtheta = y(3);
dphi = y(4);
% Compute the control signal
e = -phi - Kd*dphi - Kp*theta - Ki*trapz(t,theta);
u = max(min(e, 5), -5);
% Compute the dynamics of the system
ddtheta = (m*g*l*sin(phi) - m*l^2*dphi^2*sin(phi)*cos(phi) + u*cos(phi))/(m*l^2*(1 - cos(phi)^2));
ddphi = (-m*g*l*sin(phi)*cos(phi) + m*l^2*dphi^2*sin(phi) - u*sin(phi))/(m*l^2*(1 - cos(phi)^2));
% Return the state derivatives
dydt = [dtheta; dphi; ddtheta; ddphi];
end
```
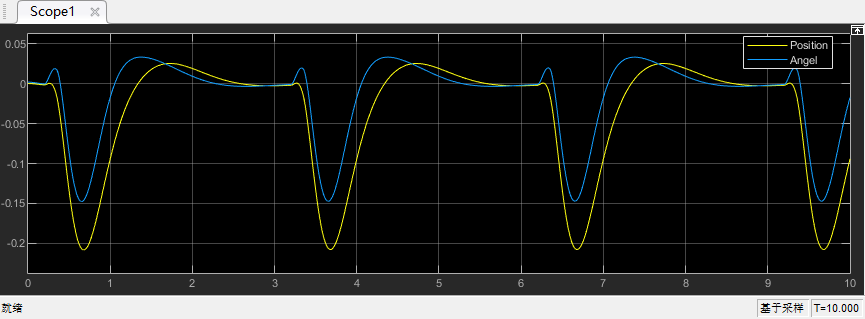
该代码中,我们定义了倒立摆的物理参数,然后使用Simscape创建了倒立摆的模型。我们添加了一个控制器,用来控制摆杆的运动。控制器使用PD控制器,根据摆杆的角度和角速度计算出控制信号。最后,我们使用ODE45求解差分方程,得到系统的响应,并绘制了摆杆的角度和位置随时间的变化图像。
























 720
720











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









