







简介(步进电机&&FOC)
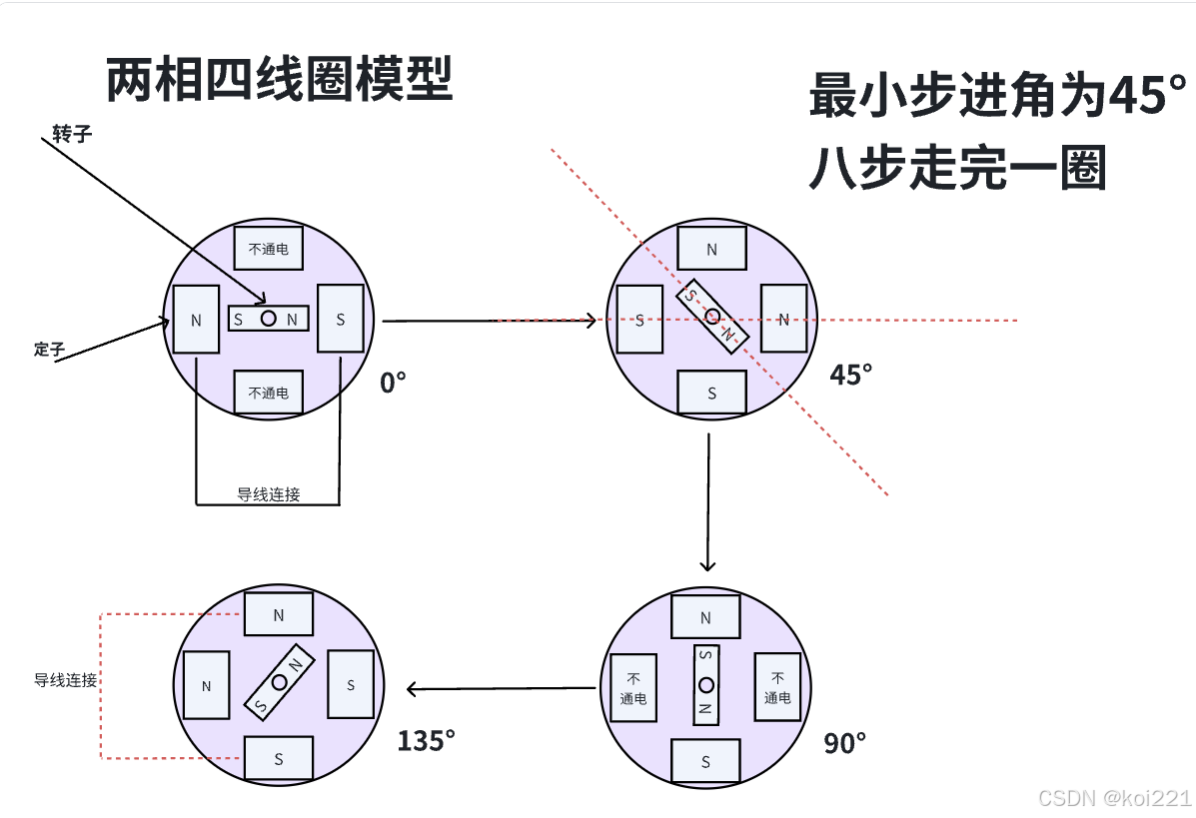
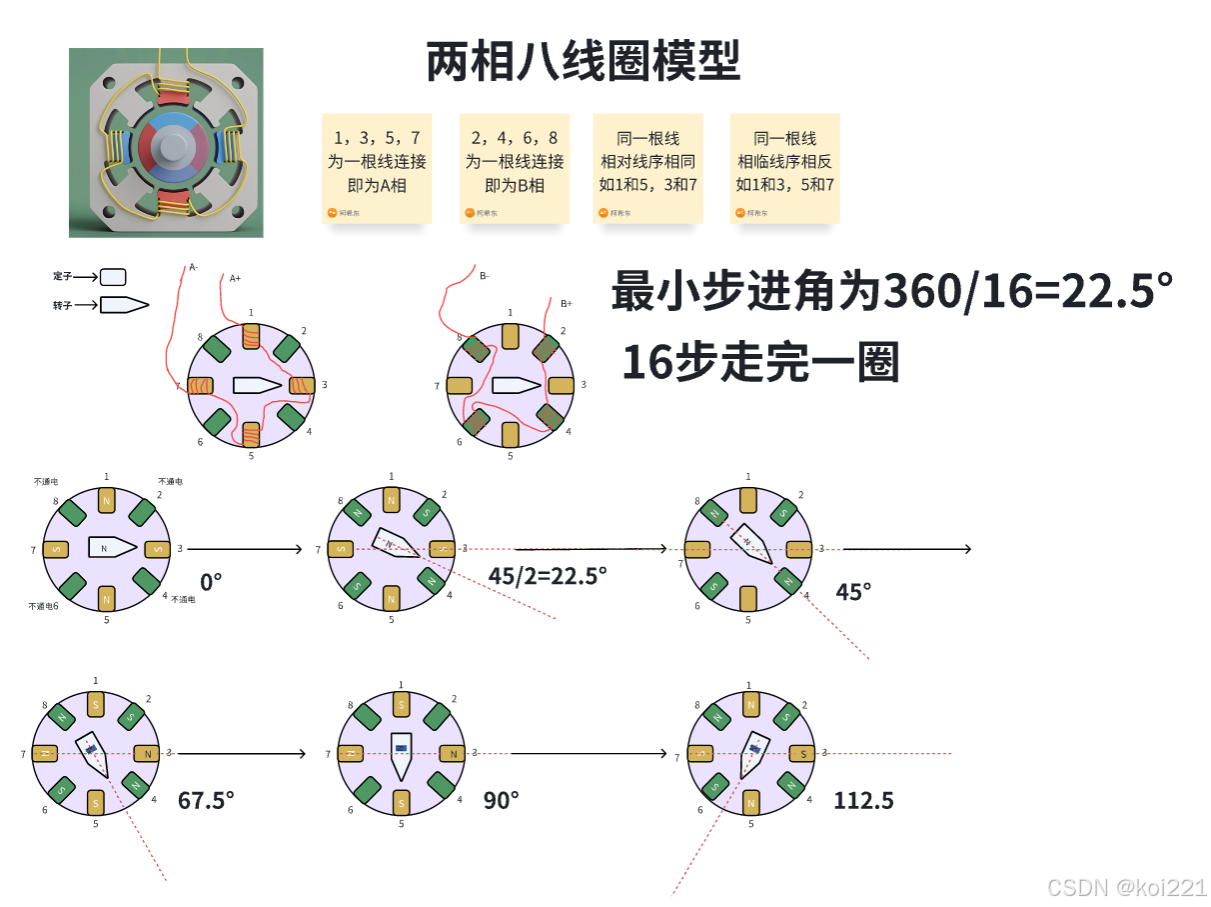
步进电机模型简介
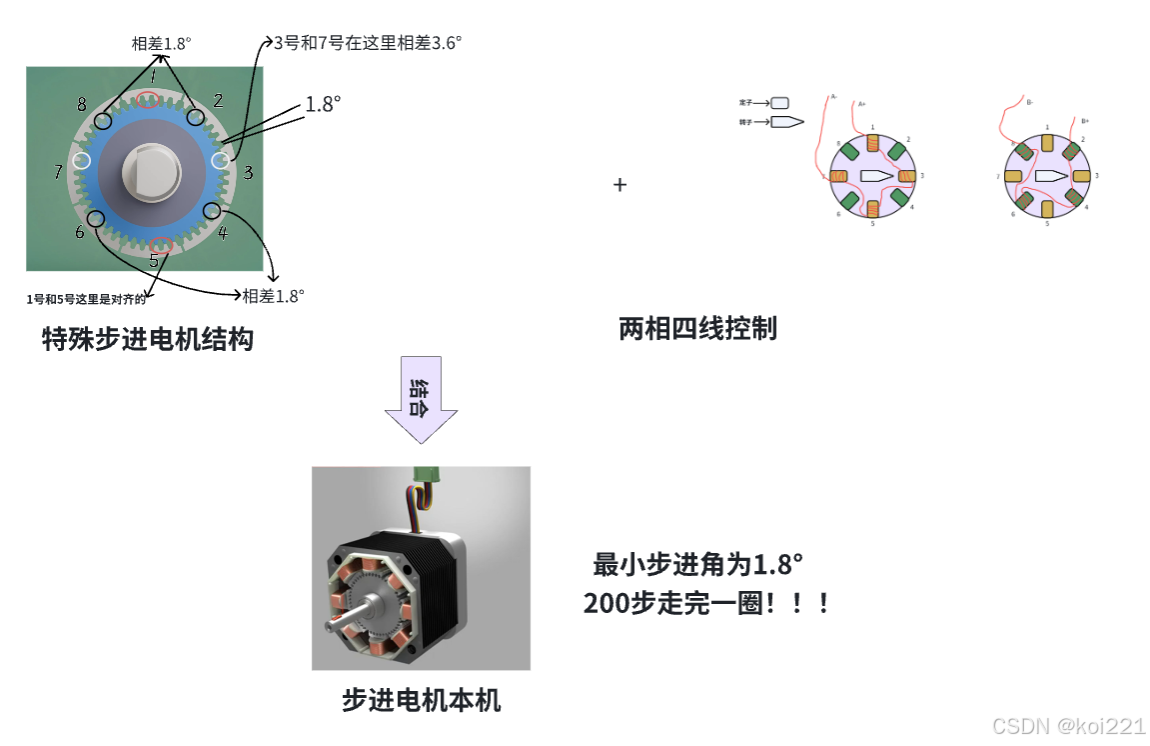
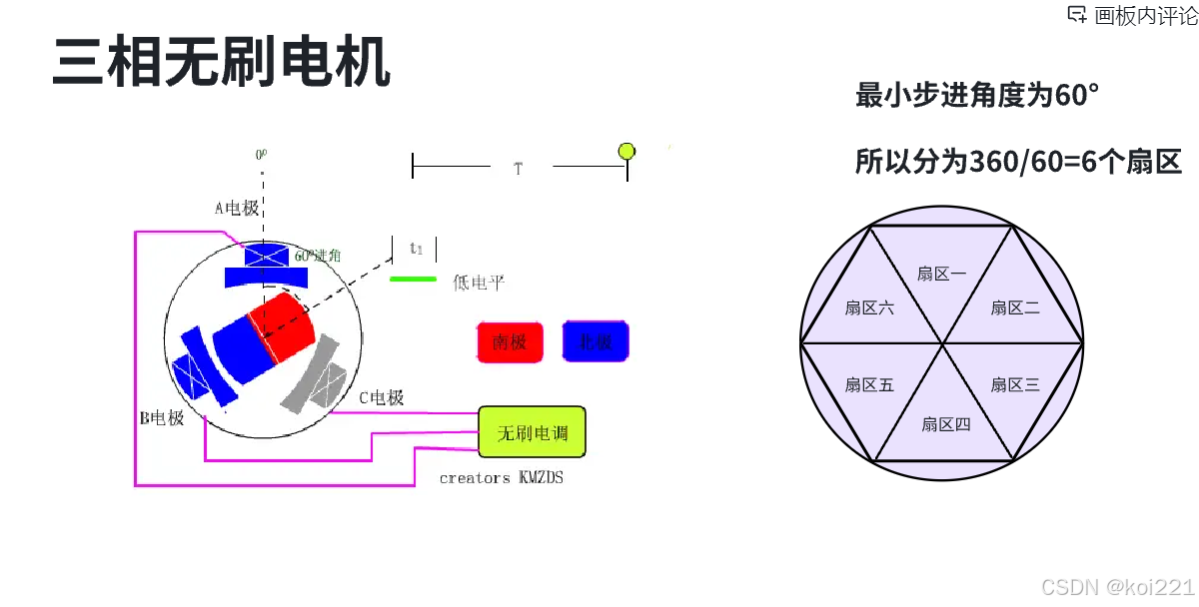
所以,步进电机的的步距角为1.8°,则可将其划分为200个扇区从而进行FOC计算。
此方案的优势介绍
| 开环控制 |
闭环控制板 |
所以,步进电机的的步距角为1.8°,则可将其划分为200个扇区从而进行FOC计算。
| 开环控制 |
闭环控制板 |
 1333
1946
613
1410
1039
1295
1万+
1528
1333
1946
613
1410
1039
1295
1万+
1528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























