







 本文详细介绍了IMM技术,包括其核心思想——使用多个运动模型匹配目标状态,通过马尔可夫矩阵和卡尔曼滤波更新模型概率。步骤涉及混合、模型滤波、似然值评估、可信度更新和最终的多模型融合,以及与EKF的结合应用。
本文详细介绍了IMM技术,包括其核心思想——使用多个运动模型匹配目标状态,通过马尔可夫矩阵和卡尔曼滤波更新模型概率。步骤涉及混合、模型滤波、似然值评估、可信度更新和最终的多模型融合,以及与EKF的结合应用。
一、IMM简介
IMM核心思想是用多个不同的运动模型来匹配机动目标的不同运动模型,说简单点便是匹配运动状态,知道你在干嘛。不同模型之间的转移概率是一个马尔可夫矩阵,目标的状态和模型概率的更新采用卡尔曼滤波或其它滤波。
二、IMM具体步骤与公式
第一步:估计混合,在时刻k-1时刻,n个系统模型都有一个最优估计xi,k-1及估计协方差Pi,k-1,然后根据IMM中的正确性概率,将每个模型相关的模型的估计状态及协方差矩阵进行加权融合,得到融合后的目标在时刻的最优状态及协方差矩阵:
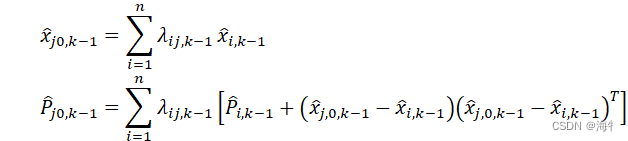
其中λij,k-1为融合的相关性系数。根据预先设定的相关性矩阵,第i行表示所有模型与第i个模型之间的相关性。因此,根据相关性,对模型进行带权融合从而获得第i个模型的融合估计状态及协方差矩阵,而每个模型本身又有一个正确性概率,因此需要对P的每个元素乘上对应的正确性概率μi,k-1![]() 后,再进行归一化处理得到λij,k-1。
后,再进行归一化处理得到λij,k-1。
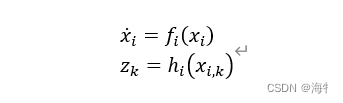
第二步:更新模型滤波,每个模型都有其对应的状态方程和统一的测量方程:

根据前面拓展卡尔曼滤波算法,我们可以得到各模型更新后的估计目标状态xi,k
和协方差矩阵Pi,k。
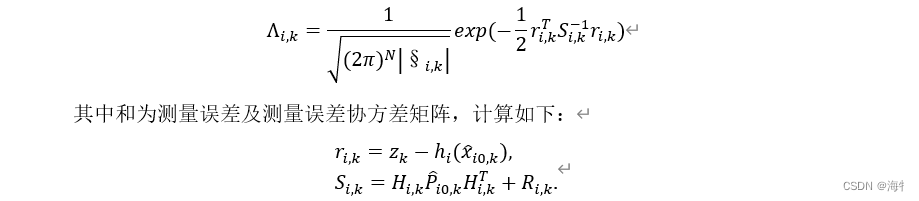
第三步:求各模型似然值,当每个模型都估计出目标的状态后,将根据估计状态来评价模型对挡墙状态估计好坏,其计算如下:
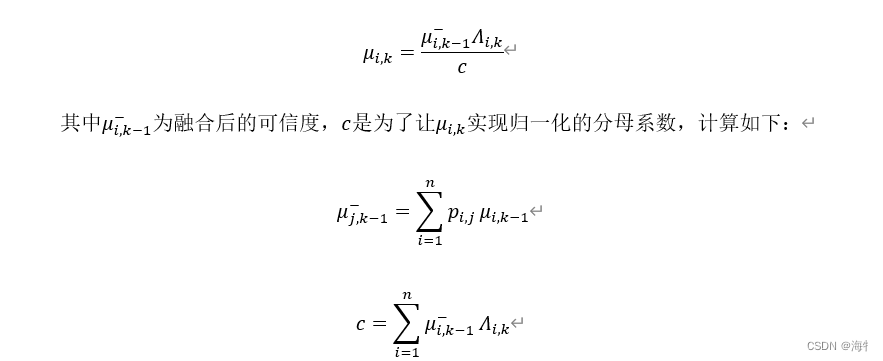
第四步:更新各模型可信度根据计算的时刻的每个模型的似然值,可以得到每个模型的描述的准确程度,从而实现模型可信度的更新
第五步:多模型估计融合,根据更新后的置信度可以依次将模型融合起来,得到IMM滤波算法的输出目标状态及协方差矩阵:

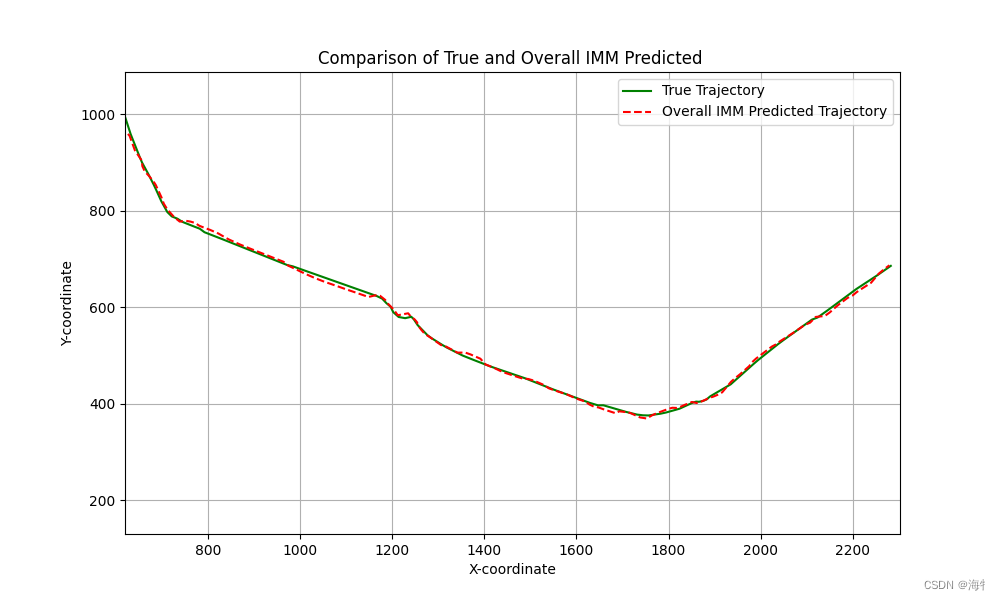
三、图像展示与EKF结合

















 362
362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









