






大家好,我是张巧龙,标题很炸,难不成是钓鱼贴?不一定,今天分享一个GitHub上的开源项目—FossaSat-1开源卫星。
Fossasat-1 是一颗由西班牙非盈利组织Fossa Systems研发的微型卫星,已经在19年底搭载新西兰的 Electron 火箭成功发射上天。

5x5x5cm大小,重量250g,这是有史以来发射到太空的最小卫星。
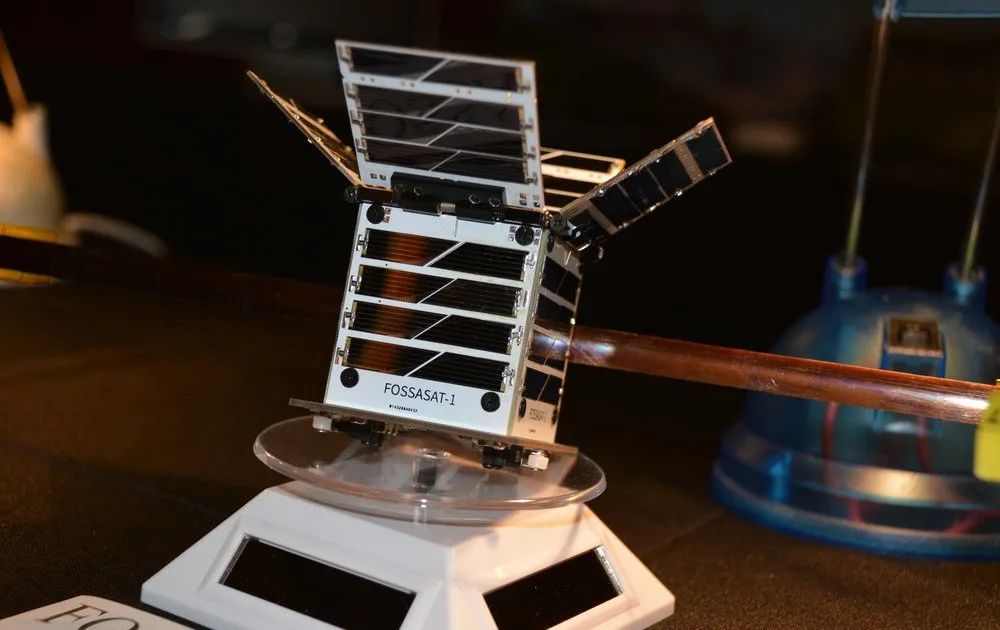
项目命名也很有意思:FossaSat,“Free open source software”,允许任何人参与该项目。
发射这么小的卫星到底用来干啥?这颗微卫星将专注于教育和研究,任何人都可以使用廉价的 LoRa 模块听到这颗卫星并与之通信,大家可以试试
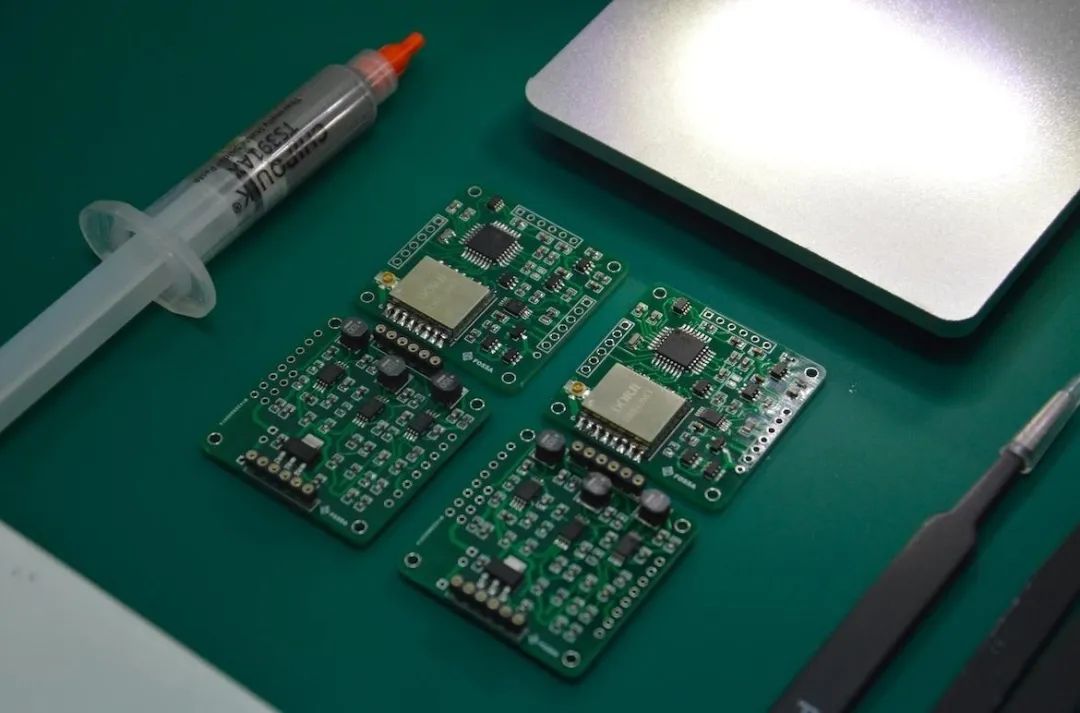
#系统硬件构成
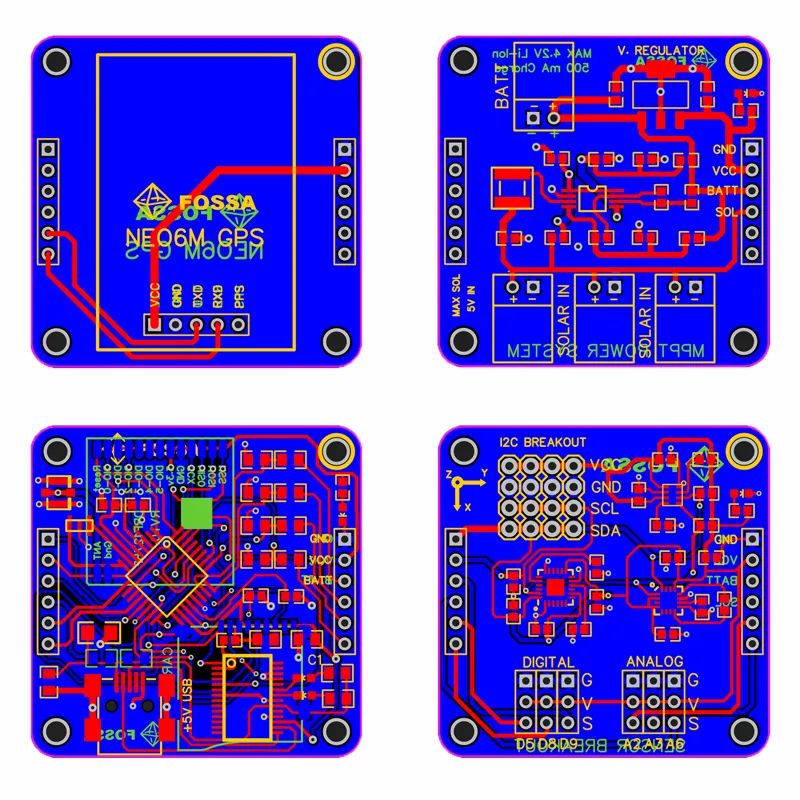
基于 Atmega 328P AU 和 Atmega 1284 微控制器,硬件由电源、通讯控制板、传感器板构成。
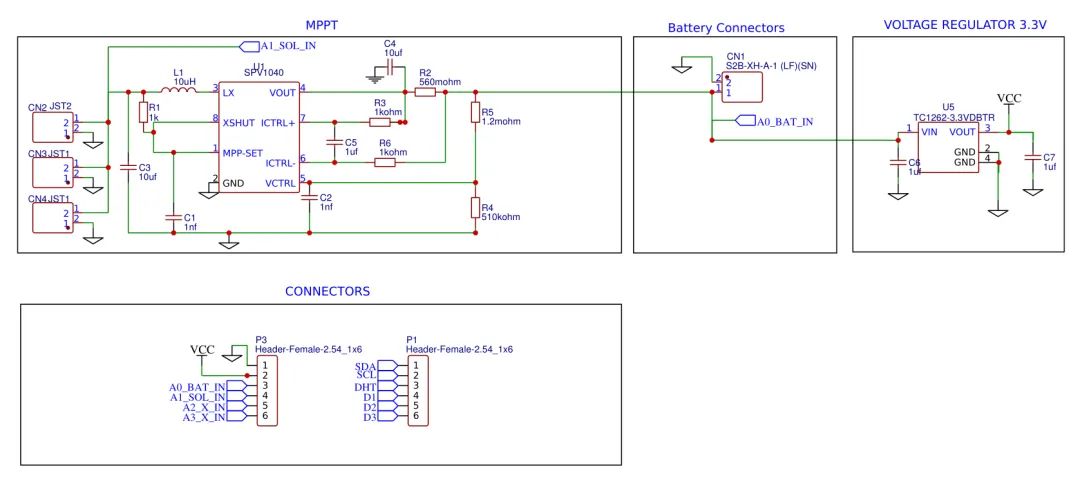
1.电源
采用 SPV1040 芯片做电池管理,为板载的锂电池充电,通过一颗LDO芯片将电压稳到3.3V给系统供电。
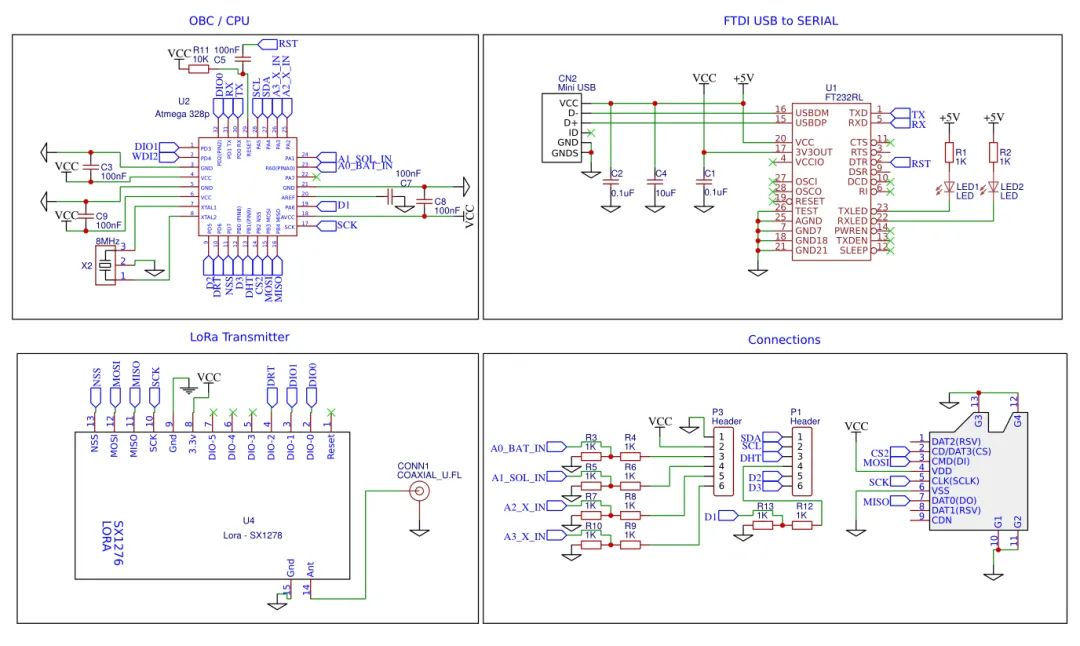
2. 通讯控制板,主要有最小控制系统、SX1276(LORA模块)等。在这值得一提的是,LORA芯片使用的是国内的DRF1268T,国产的真香


3. 传感器板;搭载了MPU6050,HMC5883LSMD磁力计,BMP280温度和气压计。

#系统软件构成
主要包括以下部分:MPU6050驱动程序、BMP280驱动程序、LORA发送和接收处理、HMC5883LSMD磁力计驱动程序、SD卡存储日志数据、外部电压检测等。


#下载地址
这个开源卫星项目所有的资料,包括原理图、软件代码、机械结构、文档说明等资料可以从以下开源地址获取:
https://github.com/FOSSASystems/FOSSASAT-1
Github可能下载比较慢,也可以直接加微信:great_xiaolong,加好友之后记得发个消息,我直接发给你!

-END-
大家好,我是张巧龙,一名教电子的大学老师,欢迎关注!

















 159
159

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









