








 超级会员免费看
超级会员免费看

1.霍夫直线检测
我们如何在图像中快速识别出其中的圆和直线?一个非常有效的方法就是霍夫变换,它是图像中识别各种几何形状的基本算法之一。
霍夫线变换
霍夫线变换是一种在图像中寻找直线的方法。OpenCV中支持三种霍夫线变换,分别是标准霍夫线变换、多尺度霍夫线变换、累计概率霍夫线变换。
在OpenCV中可以调用函数HoughLines来调用标准霍夫线变换和多尺度霍夫线变换。HoughLinesP函数用于调用累积概率霍夫线变换。
我们都知道,二维坐标轴上表示一条直线的方程式y = a*x + b,我们想求出一条直线就得想方设法求出其中的a和b的值。如果用极坐标来表示就是
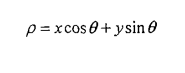
theta就是直线与水平线所成的角度,而rho就是圆的半径(也可以理解为原点到直线的距离),同样地,这两个参数也是表征一条直线的重要参数,确定他们俩了,也就确定一条直线了。正如下图所示。
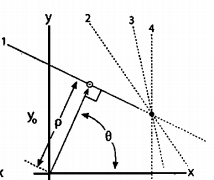
在OpenCV里,我们只需调用HoughLines就是可以得到表征一条直线的这两个参数值!
#include <iostream>
#include <opencv2\opencv.hpp>
#include <opencv2\imgproc\imgproc.hpp>
using namespace 
 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2931
2931











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











