







论文标题:Self-Powered Long-Life Microsystem for Vibration Sensing and Target Recognition
中文标题:用于振动感知和目标识别的自供能长寿命微系统
作者信息:
- Deng Yang,Wenrui Duan,Guozhe Xuan,Lulu Hou,Zhen Zhang,Mingxue Song,Jiahao Zhao
- 1. 精密仪器系,清华大学,北京 100084,中国
- 2. 智能微系统教育部重点实验室,清华大学,北京 100084,中国
- 3. 精密测量技术及仪器国家重点实验室,清华大学,北京 100084,中国
- 4. 北京生物医学检测技术及仪器实验室,北京 100084,中国
- 5. 北京集成电路高精尖创新中心,北京 100084,中国
- 6. 仪器科学与光电子工程系,北京信息科技大学,北京 100192,中国
- *通讯作者:falsxon@mail.tsinghua.edu.cn
论文出处:Sensors 2022, 22, 9594. https://doi.org/10.3390/s22249594
摘要:
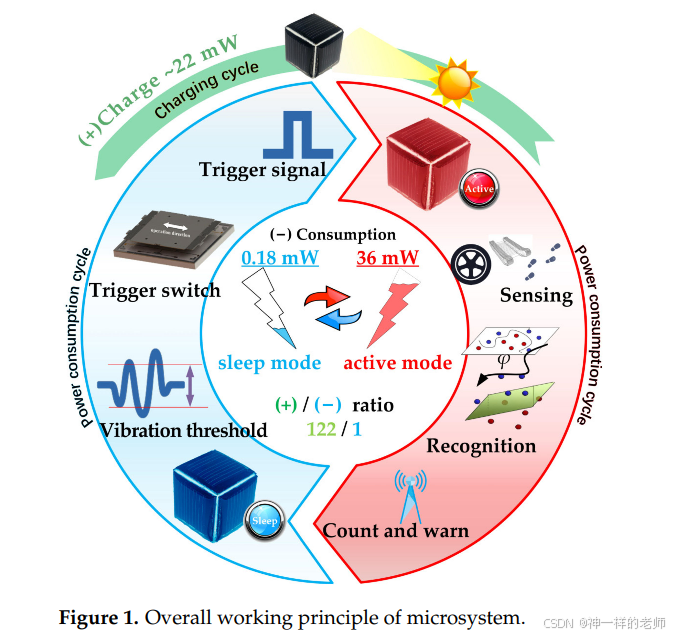
本文首次提出了一种集成了自供能、事件唤醒、连续振动感知和目标识别功能的低功耗长寿命微系统。该微系统主要用于长期无人值守的目标感知和识别。设计了一种复合能源,结合太阳能和电池实现自供能。优化了微系统的传感模块、电路模块、信号处理模块和收发模块,进一步实现了小尺寸和低功耗。基于支持向量机学习设计了一种低计算量识别算法,并将其移植到微系统的微控制器中。以行人、轮式车辆和履带车辆为目标,所提出的体积为15立方厘米、重量为35克的微系统在室内和室外成功实现了目标识别,准确率分别超过84%和65%。微系统的自供能在中午阳光下可达22.7毫瓦,11分钟的自供能可以维持微系统在睡眠模式下24小时的运行。
关键词:微系统;长寿命;自供能;振动感知;目标识别;低功耗;支持向量机
1. 引言:
随着物联网(IoT)的发展,微系统作为IoT的重要组成部分,受到了越来越多的关注。在许多无人值守的场景中,微系统被用于通过感知振动、声音、射频、红外、磁力和压力信号等信号来检测和识别目标。振动信号是目标识别中常用的信号之一。由于不同目标产生的振动具有不同的特征,且振动信号可以沿地面长距离传播,因此基于振动信号的目标识别是微系统的一个可行解决方案。微系统通常由电池供电,电池寿命有限,这与长期、大规模分布的要求相矛盾。因此,研究了低功耗和自供能技术,特别是基于振动的自供能技术,以提高微系统的续航能力。
2. 微系统设计与实现:
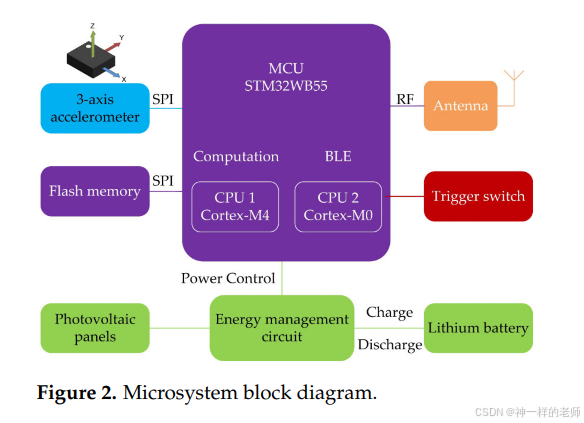
在无人值守的应用中,低功耗和自供能是长寿命微系统的关键。本文优化设计了微系统的各个模块,以实现振动感知和识别,同时保持微系统的小型化、低功耗和自供电特性。微系统由主控制单元(MCU)、三轴加速度计、天线和能源管理电路紧凑集成在单个印刷电路板(PCB)上,称为主板。MCU是一款超低功耗处理器,内置蓝牙芯片,用于数据处理和传输。三轴加速度计用于振动感知,并通过SPI接口将振动数据发送给MCU。微系统还集成了用于RF通信的天线和由光伏板、锂电池及支持能源管理电路组成的电源模块。
2.1 主板模块:
主板上集成了MCU、三轴加速度计、天线和能源管理电路。MCU型号为STM32WB55,设计用于超低功耗,具有浮点单元(FPU),支持单精度数据处理,并内置嵌入式存储器(1MB Flash,256k SRAM),满足系统所需的计算和数据处理。此外,MCU支持多种运行模式,包括睡眠模式和主动模式,这是事件唤醒的基础。
2.2 自供能模块:
自供能模块用于能量收集和存储,由五个并联的单晶硅光伏板(PVs)和Φ16 mm × 5.5 mm锂电池组成。单个光伏板的开路电压约为2伏。为避免并联光伏板之间的相互干扰,影响整体自供能效率,采用了五个二极管以确保整体转换效率。
2.3 振动触发开关:
MEMS振动触发开关用于在无人值守场景中过滤大部分非目标振动。开关的阈值可以低至0.6g,操作功耗在1.32至1.50微瓦之间。
2.4 微系统组装:
微系统硬件集成如图5所示。主板、五个光伏板、锂电池和振动触发开关被牢固地组装在一个3D打印的六面体框架中,确保了微系统模块的位置和抗冲击性。五个光伏板位于框架的不同侧面,以确保在微系统不同姿态下有效充电。微系统为立方体,边长为2.5厘米、2.5厘米和2.4厘米,体积为15立方厘米,重量为35克。
3. 识别算法和软件设计:
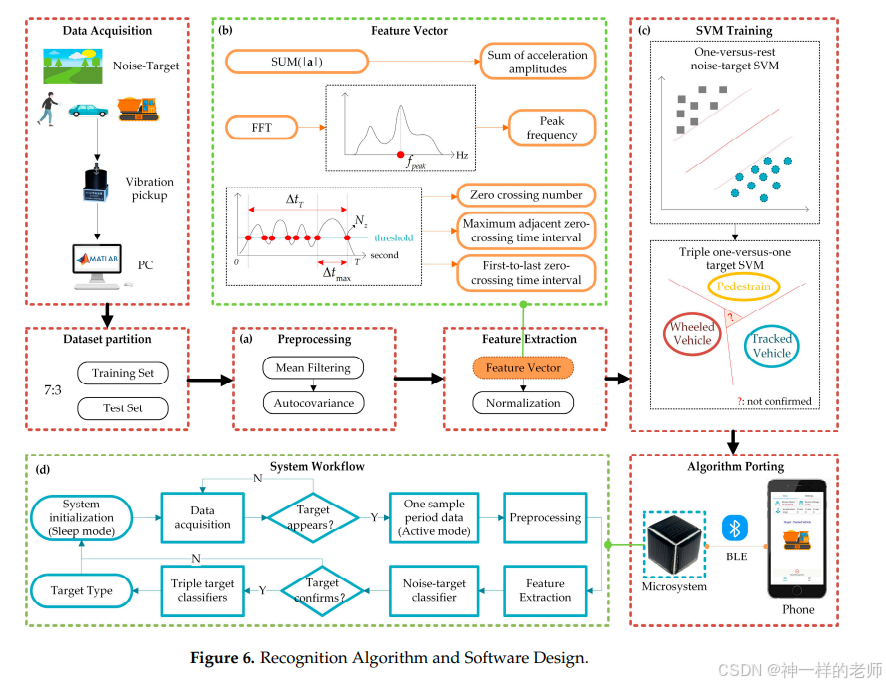
为目标识别设计了识别算法和软件流程。行人、轮式车辆和履带车辆是潜在的监控目标,也作为本文的目标。由于微系统中低精度MEMS振动传感器和低计算能力的MCU的限制,需要一个简单高效的识别算法。首先对原始数据进行预处理以提高信噪比。然后,使用低计算量的SVM分类算法进行目标识别。为进一步降低微系统功耗,微系统设计为在低功耗睡眠模式和高功耗主动模式下工作。
3.1 预处理:
行人、轮式车辆和履带车辆在地面上的运动导致非刚性土介质的变形,变形在土中传播以产生振动信号。在此过程中,由于介质传播特性的干扰、传感器误差和其他振动源的干扰,目标振动信号的信噪比随着传感器与目标之间距离的增加而迅速降低,影响目标的检测和识别。选择合适的方法对原始数据进行预处理可以显著提高信号质量。本文使用均值滤波和自协方差方法进行预处理,计算复杂度小。
3.2 特征提取:
在应用SVM分类之前需要提取信号特征。目标的信号特征差异越大,分类性能越好。考虑到不同目标振动信号在时域和频域的特性,提取了以下五个特征:加速度幅度之和asum、峰值频率fpeak、零交叉数Nz、最大相邻零交叉时间间隔∆tmax和第一到最后零交叉时间间隔∆tT。所有五个特征都在软件流程中定义的一个信号采样周期内讨论。这些特征具有计算复杂度低和易于在微系统中硬件实现的优点。
3.3 SVM训练:
有许多种机器学习算法和模型可以识别无人区域的振动信号。本文基于微系统的硬件组成,需要一个计算量小、内存小的算法。SVM是一种基于统计学习的数据处理方法。其原理是在特征空间中将属于不同类别的样本分为两个类别的两侧。它通常用于解决二分类问题。目前,基于SVM的多类分类方法有两种,即一对一和一对多。一对一方法是指在训练过程中构建每两类之间的SVM分类器,在测试过程中多个分类器进行投票,以得票最多的作为最终目标类别。这种方法避免了正负样本不平衡导致的分类准确性降低和添加新类别时需要重新训练分类器的问题。本文首先应用一对多噪声-目标分类器将目标从环境随机振动中分类出来。然后,使用三个一对一的目标分类器实现行人、轮式车辆和履带车辆的分类。
3.4 系统工作流程:
考虑到微系统特别是能源的有限硬件资源和目标识别性能,优化了微系统的软件工作流程,包括系统初始化、目标初始检测、系统工作模式切换、预处理、特征提取、目标重新检测和最终目标分类。
4. 结果和讨论:
4.1 功耗和自供能
分别测试了低功耗睡眠模式和高功耗主动模式下的功耗。睡眠模式下的功耗为0.18毫瓦,而主动模式下的功耗增加到36毫瓦。在太阳能模拟器和自然光条件下验证了微系统的自供能性能。在室内条件下,使用输出强度为1千瓦/平方米的太阳能模拟器(DAIEL LSS-7120),在200毫米的距离下照射微系统。在室外条件下,微系统在晴朗的中午阳光下照射。测试了不同入射角下的自供能性能,以模拟一天中不同时间的入射条件。
4.2 传感和识别实验
在这个实验中,行人、履带车辆和轮式车辆被用作识别目标。首先,目标之一以恒定速度沿测试路径移动,并由五个高精度振动传感器收集目标的振动数据。然后,数据用于训练识别算法。之后,将训练好的识别算法移植到微系统中。最后,微系统被应用于室内和室外的目标识别。
4.2.1 数据采集实验
数据采集实验的设置如图8a所示。在长150米、宽5米的平坦土壤路面上收集行人、轮式车辆和履带车辆的振动数据。五个高精度振动传感器放置在路面中点,距离路面



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











