







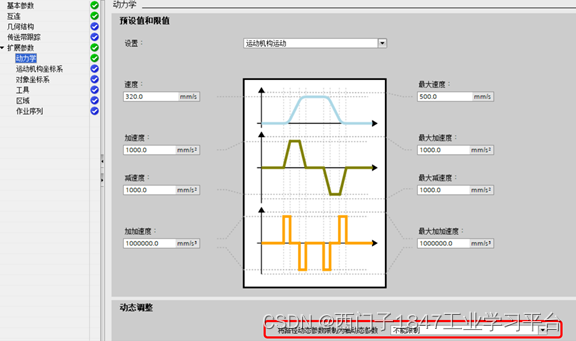
激活动态调整时,会为运动机构的运动计算速度曲线,其中考虑了运动机构运动的动态规范或动态预设和动态限值以及运动机构轴的最大速度、最大加速度和最大减速度。此外,还考虑了定向运动的速度、加速度和减速度的动态预设和动态限值。
动态调整可设置为以下三种模式:
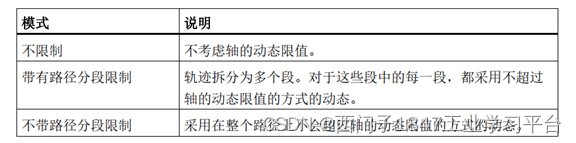
另外,我们知道,运动机构有另一个重要概念“Buffer Mode”,那么当动态调整结合“Buffer Mode”使用时,两者的各种模式搭配,会产生怎样的结果呢?
下面我们通过试验对动态限值中的最大速度设定值来进行验证。
试验设定
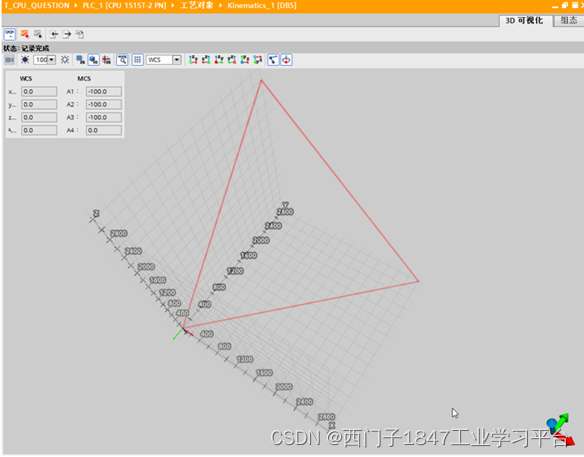
定义三个定位轴 1, 2, 3 和一个kinematic笛卡尔3D运动机构。将轴 1, 2, 3 分别关联到运动机构的 X, Y, Z 轴。
在轴的组态中,将轴 1 的最大速度组态为 180 mm/s,将轴 2 的最大速度组态为 120 mm/s,将轴 3 的最大速度组态为 300 mm/s。三个轴组态的电机转速都是 3000 rpm,螺距为 10 mm。
组态完成后,执行三条MC_MoveLinearAbsolute指令,将刀具在WCS坐标系下从初始位置(0, 0, 0)依次移动到点(3000, 3000, 0), (0, 3000, 3000),(0, 0, 0)。如下图中三角形所示。刀具的路径速度设定为 320 mm/s。
试验 1
Buffermode = 1 (附加运动)<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 525
525











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









