






 文章介绍了在机械加工行业中,如何通过Modbus转CANopen网关实现HMI与伺服驱动系统的通信,重点阐述了网关的功能、通信网络组成、协议转换以及硬件和软件配置过程。
文章介绍了在机械加工行业中,如何通过Modbus转CANopen网关实现HMI与伺服驱动系统的通信,重点阐述了网关的功能、通信网络组成、协议转换以及硬件和软件配置过程。
Modbus 转CANopen网关在机加行业实现机床运动控制器的通信为载人航天项目保驾护航
关键词:机械加工行业 Modbus CANopen CAN 总线 HMI 伺服驱动系统
下文介绍的机加中心项目里,介绍 Moubus转canopen 的 Modbus网关实现 HMI人机界面系统与机床运动控制器的通信。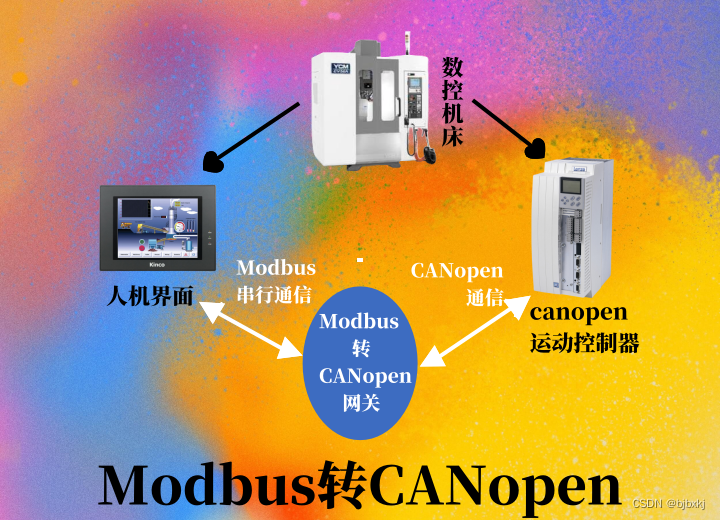
一、系统概述
1、系统结构及功能
数控系统:是机加中心的重要组成,负责控制机床按不同工序,自动选择和更换刀具,自动改变机床 主轴转速、进给量和刀具相对工件的运动轨迹,以及其他辅助功能。
人机显示:是操作人员与数控装置进行信息 交流的工具,主要用来实现系统各个参数的状态值等监视、设置加工初始值信息等。本加工中心的主要控 制部分即运动控制器是德国伦茨的伺服驱动系统。该伺服驱动系统采用分布式供电结构,由供电模块和轴 模块两部分组成,内置两个独立 CAN 总线接口,可以完成高速大容量现场通信。HMI 与伺服驱动系统之间 进行通信,实时采集机床实际运行中的各项参数并给定相关参数值调整控制器相关动作。HMI 提供 RS485 串口作为通信接口,能够作为 Modbus 主站与 Modbus 从站设备实现现场总线通信。伺服驱动系统作为 CANopen 从站,能实时将控制器参数上传到人机界面 HMI,并且根据人机界面 HMI 的给定量参数值进行相 关动作调整。为实现这两种不同总线协议之间的通信,倍讯科技的 Modbus 转 CANopen 网关 Moubus转canopen发挥 了非常重要的作用。
系统结构如下图 1 所示。其中,网关 Moubus转canopen在 CANopen 侧做 CANopen 主站,在 Modbus 侧做 Modbus 从站。用户在倍讯科技提供的产品配置软件CANopen Configuration Studio中设置相关的现场总线参数及命令,进行不同总线间 的数据地址映射,并将配置下载到网关中使其生效,即可实现不同现场总线间数据的双向传输。
2、通信网络组成
2.1 通信网络组成
Modbus 协议是一种适用于工业控制领域的主从式串口通信协议,它采用查询通信方式进行主从设备的 信息传输,可寻址 1-247 个设备地址范围。协议包括广播查询和单独设备查询两种方式,二者区别就是广 播查询不需要从设备回应信息,主、从设备查询通信过程见
Modbus 协议有两种传输模式:ASCII 模式和 RTU 模式。同波特率下,RTU 模式较 ASCII 模式能传输更 多的数据,所以工业网络大都采用 RTU 模式。RTU 模式下的信息传输报文格式如图3
它没有起始位和停止位,而是由至少 3.5 个字符间隔时间作为信息的起始和结束标志。信息帧所有字 符位由 16 进制字符 0-9、A-F 组成。 Modbus RTU 通信协议帧结构:
2.2 CANopen 协议简介 在 CANopen 网络中的通信信息以对象来进行描述的。CANopen 通信模型定义了 4 种报文(通信对象): 网络管理报文(NMT)、服务数据对象(SDO)、过程数据对象(PDO)和特殊功能对象
SDO 通过使用索引和子索引(在 CAN 报文的前几个字节),SDO 采用客户机服务器模式。SDO 客户机能 够访问设备(服务器)对象字典中的条目或项(对象)。 SDO 通过 CAL 中多元域的 CMS(CAN-based Message Specification)对象来实现,允许传送任何长度的数据(当数据超过 4 个字节时分拆成几个报文)。SDO 协议是确认服务类型。服务器为每个消息生成一个应答(一个 SDO 需要两个 ID)。SDO 请求和应答报文总 是包含 8 个字节(没有意义的数据长度在第一个字节中表示,第一个字节携带协议信息)。
PDO 对象用来传输实时数据,PDO 对象采用生产者消费者模式。数据从一个生产者传到一个或多个消 费者。数据传送限制在 1 到 8 个字节(例如,一个 PDO 可以传输最多 64 个数字 I/O 值,或者 4 个 16 位的 AD 值)。PDO 通信没有额外的协议规定。PDO 有两种类型的使用:数据发送和数据接收。它们以 TPDO 和 RPDO 区分。
PDO 可以有多种传输方式,其中,同步传输是指为了使设备同步,由一个同步应用程序周期性地发送 一个同步对象(SYNC 对象)。异步传输是由远程帧触发传送或由设备子协议中规定的对象特定事件触发传送。
二、Modbus 转 CANopen 网关 Moubus转canopen功能及接口特性 Moubus转canopen是实现 CANopen 从站和 Modbus 主站通信的的协议转换网关,在网关内存中有输入、输出数据 缓存区(分别为 512 字节,输入、输出针对网关 Modbus 端而言)。凡支持 Modbus 从站接口的设备都可以 通过 Moubus转canopen与 CANopen 主站设备互联并实现数据双向交换。其中 Moubus转canopen在与 CANopen 从站设备通信时作为 CANopen 主站,Moubus转canopen在与 Modbus 主站设备通信时,作为 Modbus 从站。倍讯科技也提供 CANopen 主站设备与 Modbus 从站设备通信的网关
1、CANopen 从站接口特性
CAN 接口和电源端口共用五针端子,支持 CAN2.0A 协议 • CANopen 支持 CANopen DS301V4.02;支持 PDO;波特率支持 5Kbit/s~1Mbps • 支持 CANopen 协议的最多 8 个字节的 TPDO、最多 8 个字节的 RPDO
• TPDO 和 RPDO 可以采用默认的 COB-ID,也可以采用用户自定义的 COB-ID,默认的 COB-ID根据EDS文件一般为:TPDO 的 COB-ID 只能为:384+节点地址(0x180+节点地址) 或 640+节点地址(0x280+节点地址) 或 896+节点地 址(0x380+节点地址) 或 1152+节点地址(0x480+节点地址);RPDO 的 COB-ID 只能为:512+节点地址 (0x200+节点地址)或 768+节点地址(0x300+节点地址)或 1024+节点地址(0x400+节点地址)或 1280+ 节点地址(0x500+节点地址)
2、Modbus 主站接口特性 • 串口采用 DB9(针)端子,支持 RS485 接口或 RS232 接口(用户订货时指明),半双工,波特率: 1200~115200bps(支持波特率:1200、2400、4800、9600、19200、38400、56700、115200bps);数据位: 8bit;校验位:无、奇、偶可选;停止位:1 位、2 位可选 • 支持的功能码:01H、02H、03H、04H、05H、06H、0FH、10H; • 支持的通信格式:RTU格式
3、其它特性
• 工作电源:直流 24V(11V~30V),消耗电流最大为 60mA(24V)
• 周围空气温度:-20℃ ~ 60℃,且 24 小时的平均值不超过 45℃(特殊定货除外)
• 机械尺寸:100mm(长)×700mm(宽)×25mm(深)
• 安装:35mm 导轨
三、Modbus 转 CANopen 网关 Moubus转canopen的配置
1、Modbus 转 CANopen 网关 Moubus转canopen的硬件配置 通过双击网关面板上的配置按钮可使 Moubus转canopen处于配置状态或者正常运行状态。
当 Moubus转canopen处于配置状态时,用户可以通过配套配置软件CANopen Configuration Studio设置相关 Modbus站地址波特率、CANopen 相关 PDO 命令等参数。在配置模式下,用户需使用tcp口网线连接网关和电脑进行配置。
Moubus转canopen的电源接口和 CAN 接口皆为3针端子。其中,CAN 接口 1KV 光电隔离。
2、Modbus 转 CANopen 网关 Moubus转canopen的软件配置
网关网口与电脑正确连接,给网关上电。
在配置软件主界面,点击“新建图标”,选择MR-Canopen
设置 Moubus转canopen作为 CANopen 主站的通信波特率、节点地址等 参数。用户在软件中设置的“CANopen 波特率”需和 CANopen 总线波特率参数一致(CANopen 主站设备即 伺服驱动系统通信波特率),
添加从站后在 CANopen 从站下配置实际应用中需要的 TPDO 以及 RPDO 命令,并设置命令的 COB-ID、字节数,通过 软件“自动映射”功能自动计算“映射地址”。RPDO 的“映射地址”为接收到 CANopen 主站发送过来的数 据在网关内存输出缓存区中的存储地址。TPDO 的“映射地址”为发送给 CANopen 主站的数据在网关输入缓 存区中的存储地址。
在配置软件主界面,点击“Modbus”,设置串口通信参数:波特率、数据位、校验类型、停止位、传 输格式等。注意:串口通信参数需与要连接的 Modbus 主站设备(即 HMI)的串口通信参数一致。
设置好网关作为Modbus从站的地址后,确认RS485的参数波特率与主站保持一致。下载进网关即可。
搜索到网关ip后双击设备并进行下载即可。
“TPDO 映射地址”对应“1、2、3、4(Modbus 读命令)内存映射地址”:网关读取 Modbus 从站设备 (HMI)的数据(通过 Modbus 读命令)存储在网关的输入缓存区,并通过配置的 TPDO 命令将网关输入缓 存区的数据发送给 CANopen 主站设备。 “RPDO 映射地址”对应“5、6、15、16(Modbus 写命令)内存映射地址”:网关接收 CANopen 从站设备(伺服驱动系统)的数据(网关接收 TPDO 命令)存储在网关的输出缓存区,并通过配置的 Modbus 写命 令将网关输出缓存区的数据发送给 Modbus 主站设备

















 3381
3381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









