






一、arduino IDE安装
软件 |Arduino的![]() https://www.arduino.cc/en/software
https://www.arduino.cc/en/software


下载相应版本
进行安装
二、配置arduino
找到 打开等待其安装完成
打开等待其安装完成
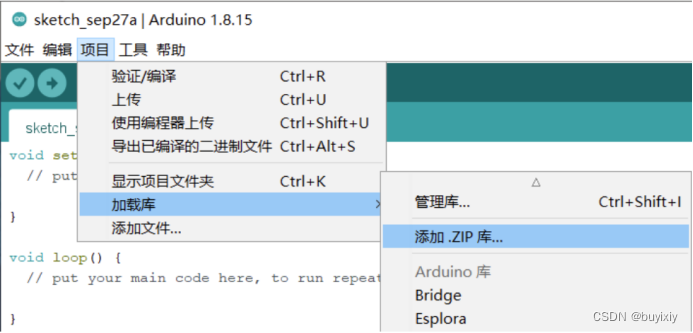
找到 通过Arduino IDE 菜单>项目>加载库>添加.ZIP库 导入到库
通过Arduino IDE 菜单>项目>加载库>添加.ZIP库 导入到库
打开程序文件

通过工具>开发板>ESP8266 Boards>ESP8266 Module

三、代码更改
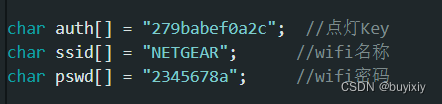
将WIFI名称和密码更改为自己的手机热点
然后 验证
验证
没有问题之后将esp8266接入电脑
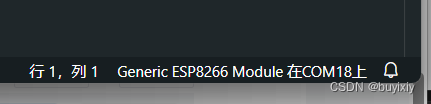
如图进行选择(端口会因电脑而异)

右下角出现这样的显示(配置完成)
点击 烧入代码
烧入代码
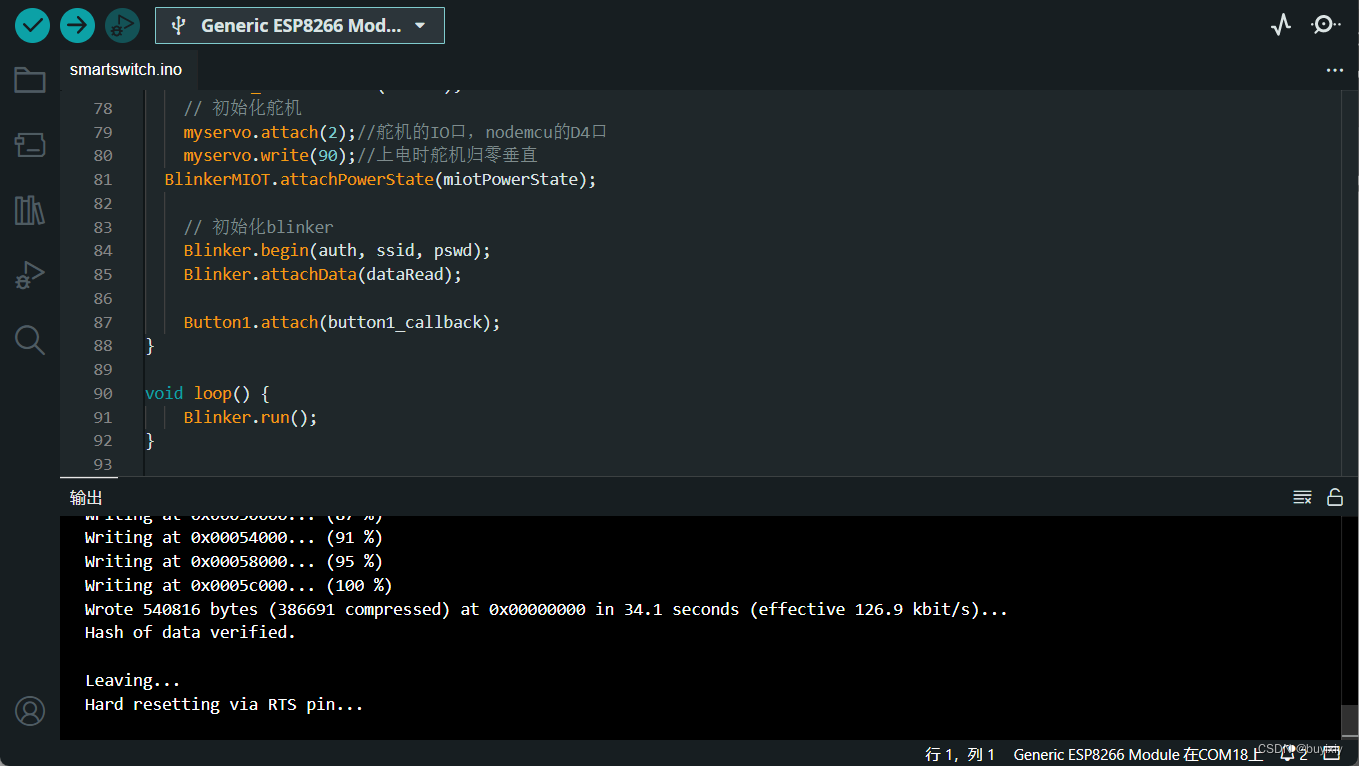
烧录完成后查看手机热点是否有设备连接
四、点灯app配置
跟上面视频申请完设备之后点击
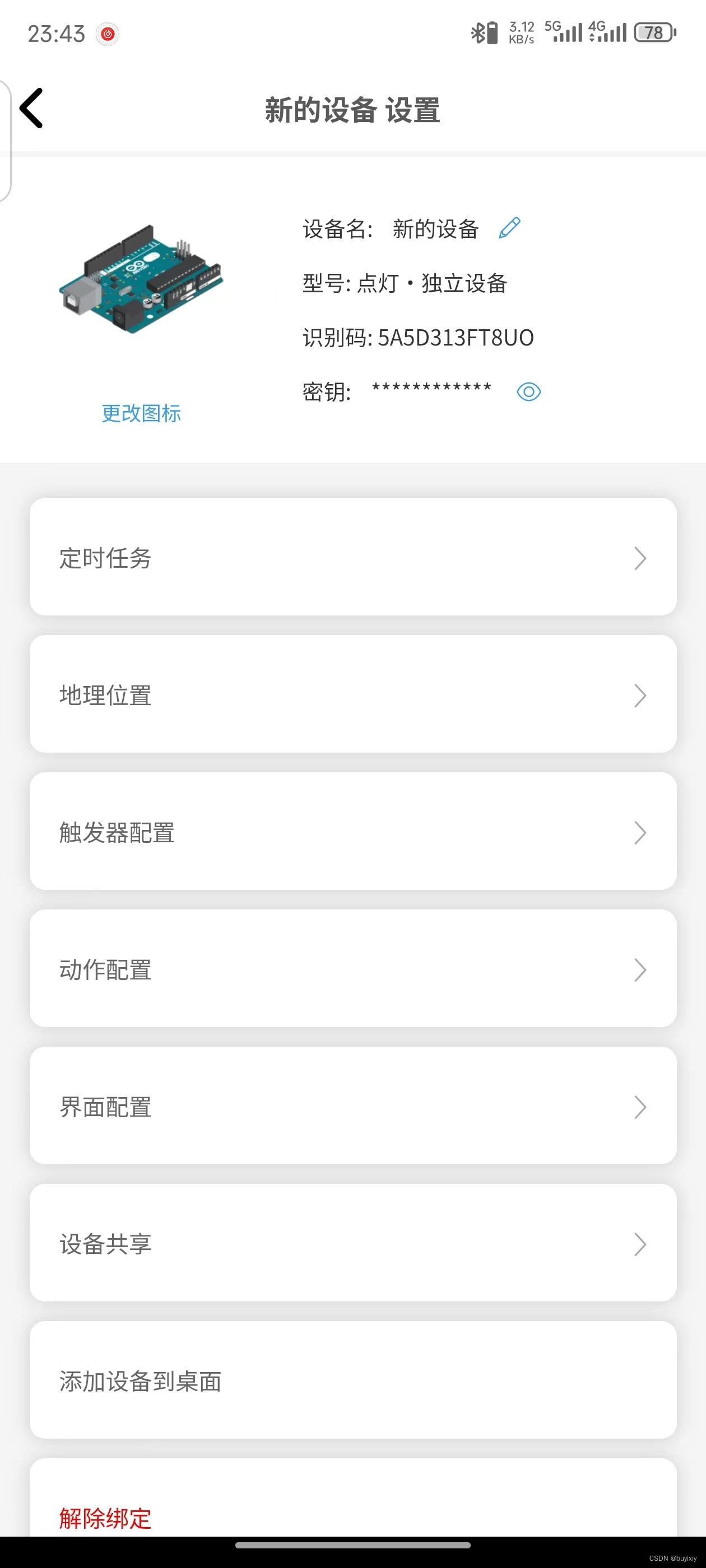
点击
将代码填入
{¨config¨{¨headerColor¨¨transparent¨¨headerStyle¨¨dark¨¨background¨{¨img¨¨assets/img/headerbg.jpg¨¨isFull¨«}}¨dashboard¨|{¨type¨¨btn¨¨ico¨¨fad fa-lightbulb-on¨¨mode¨Ê¨t0¨¨开灯¨¨t1¨¨文本2¨¨bg¨Ì¨cols¨Í¨rows¨Í¨key¨¨test¨´x´Ë´y´Ì¨speech¨|÷¨cus¨¨on¨¨lstyle¨Ë¨clr¨¨#076EEF¨}{ßAßBßC¨fad fa-lightbulb¨ßEÉßF¨关灯¨ßHßIßJÌßKÍßLÍßMßN´x´Ë´y´ÑßO|÷ßRËßSßT}{ßA¨deb¨ßEÉßJÉßKÑßLÌßM¨debug¨´x´É´y´¤D}÷¨actions¨|¦¨cmd¨¦¨switch¨‡¨text¨‡ßQ¨打开?name¨¨off¨¨关闭?name¨—÷¨triggers¨|{¨source¨ßa¨source_zh¨¨开关状态¨¨state¨|ßQßd÷¨state_zh¨|¨打开¨¨关闭¨÷}÷}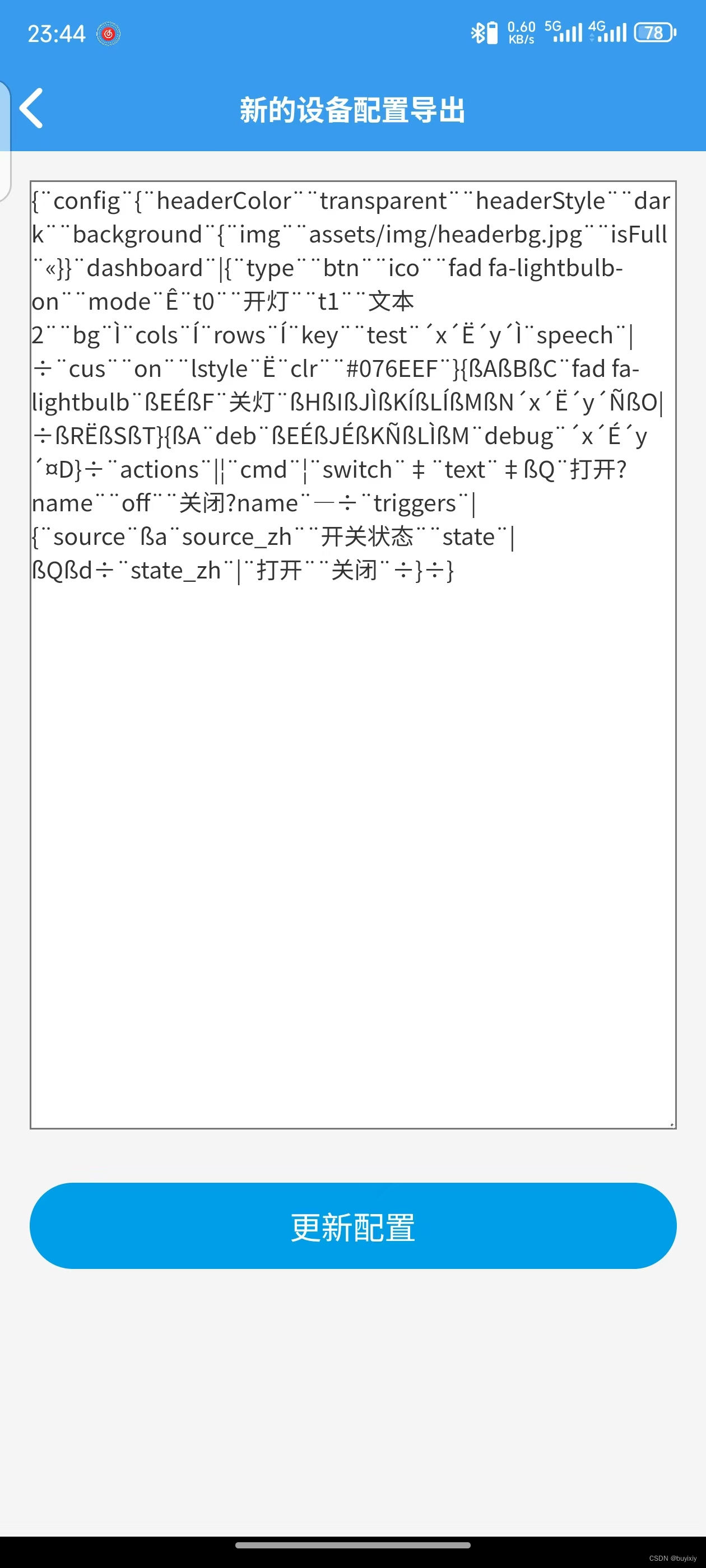
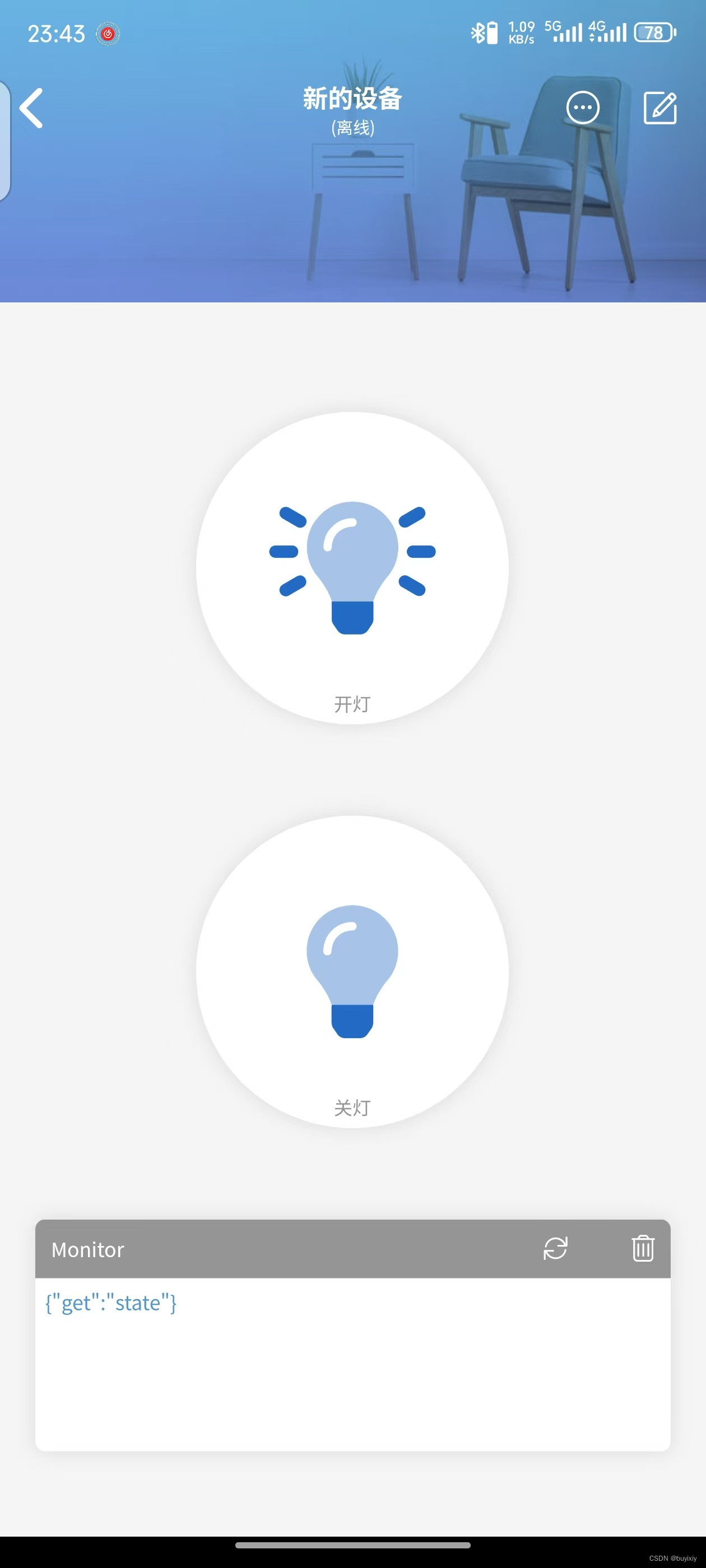
然后就成为第一张图片的按钮形状了
五、硬件连接
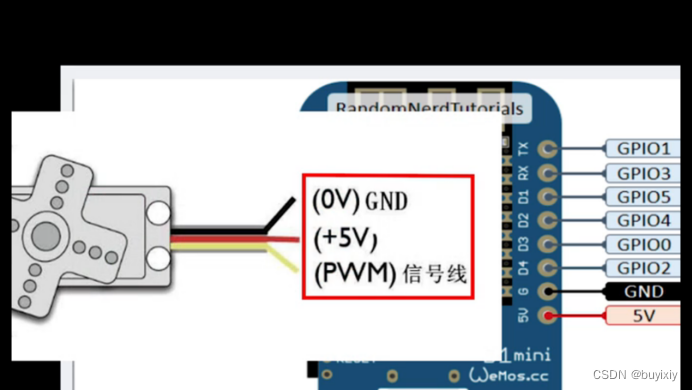
舵机 8266
5V --------- 5V
0V --------- G
PWM -------- IO2
需要切换线序(将三联杜邦线母头拨开换成三个单母头)

六、代码
#define BLINKER_WIFI
#define BLINKER_MIOT_LIGHT
#include <Blinker.h>
#include <Servo.h>
Servo myservo;//定义舵机
char auth[] = "XXXXXXXX"; //点灯Key
char ssid[] = "XXXXXXXX"; //wifi名称
char pswd[] = "XXXXXXXX"; //wifi密码
// 新建组件对象
BlinkerButton Button1("test");
int counter = 0;
void miotPowerState(const String & state)//电源类操作
{
BLINKER_LOG("need set power state: ", state);
if (state == BLINKER_CMD_ON) {
myservo.write(110);//收到“on”的指令后舵机旋转110度
BlinkerMIOT.powerState("on");
BlinkerMIOT.print();//反馈状态
delay(1000);//延时1秒
myservo.write(90);//舵机归零,回到垂直状态
}
else if (state == BLINKER_CMD_OFF) {
myservo.write(70); //舵机偏转70°
BlinkerMIOT.powerState("off");
BlinkerMIOT.print();
delay(1000);
myservo.write(90);
}
}
// 按下按键即会执行该函数
void button1_callback(const String & state)
{
BLINKER_LOG("get button state: ", state);
if (state=="on")
{
myservo.write(110);//收到“on”的指令后舵机旋转110
delay(1000);//延时
myservo.write(90);//舵机归零垂直
} else if(state=="press"||state=="tap")
{
myservo.write(70);//长按开关按键后舵机旋转70
delay(1000);//延时
myservo.write(90);//舵机归零垂直
}
}
// 如果未绑定的组件被触发,则会执行其中内容
void dataRead(const String & data)
{
BLINKER_LOG("Blinker readString: ", data);
counter++;
}
void setup()
{
// 初始化串口
Serial.begin(115200);
BLINKER_DEBUG.stream(Serial);
// 初始化舵机
myservo.attach(2);//舵机的IO口,nodemcu的D4口
myservo.write(90);//上电时舵机归零垂直
BlinkerMIOT.attachPowerState(miotPowerState);
// 初始化blinker
Blinker.begin(auth, ssid, pswd);
Blinker.attachData(dataRead);
Button1.attach(button1_callback);
}
void loop() {
Blinker.run();
}















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









