







编号:47
基于51单片机的倒车雷达系统
功能描述:
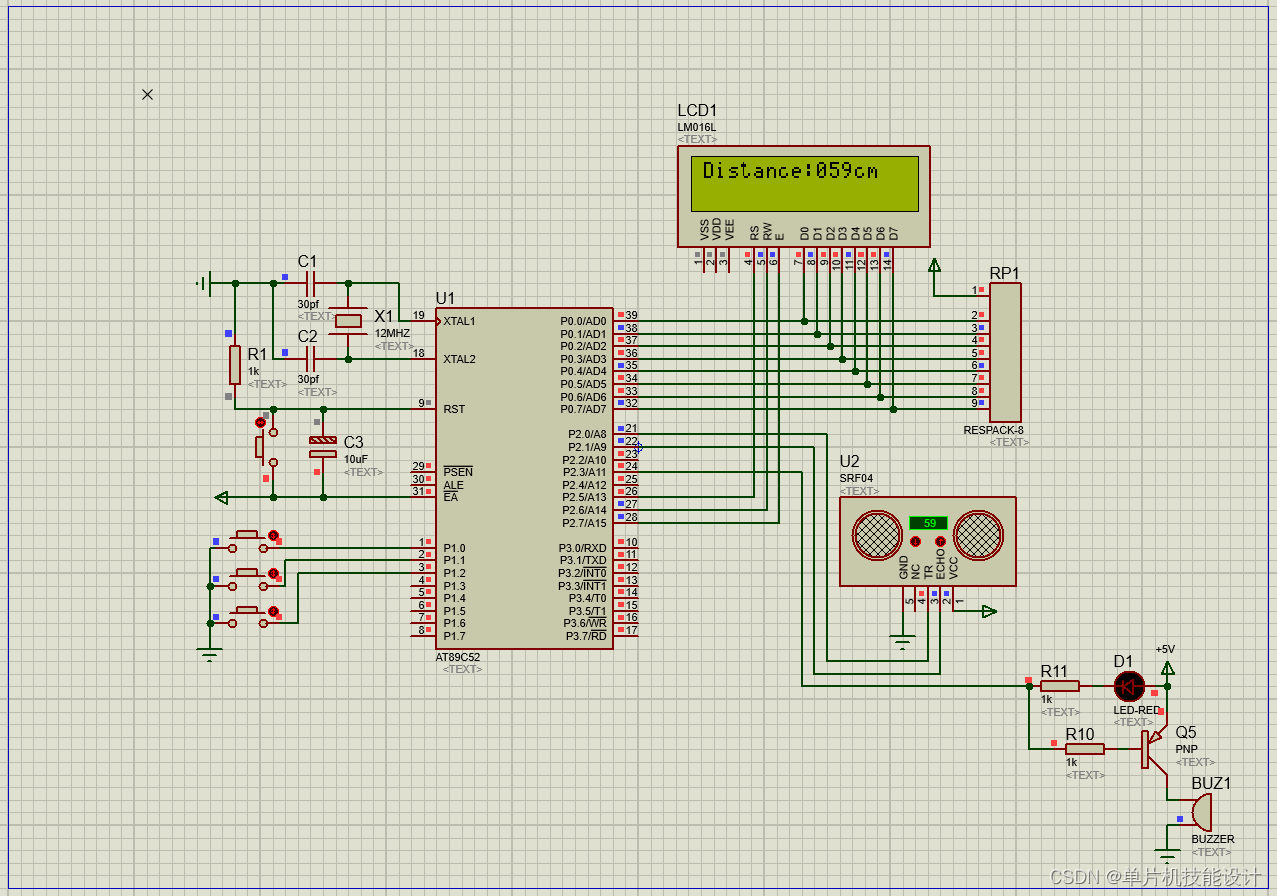
本设计由51单片机+HC_SR04超声波模块+液晶1602+按键+蜂鸣器LED组成。
1、采用STC89C52RC系列单片机。
2、HC_SR04超声波模块实现测距。测距范围2cm-331cm之间。
3、液晶1602实时显示测到的距离。
4、三个按键可实现上限报警值设定,按键分别为设置键、设置加、设置减。
5、当测得距离小于上限值时,声光报警。
Proteus8.6以上版本均可使用
视频演示链接:
47、基于51单片机的倒车雷达系统
仿真图:
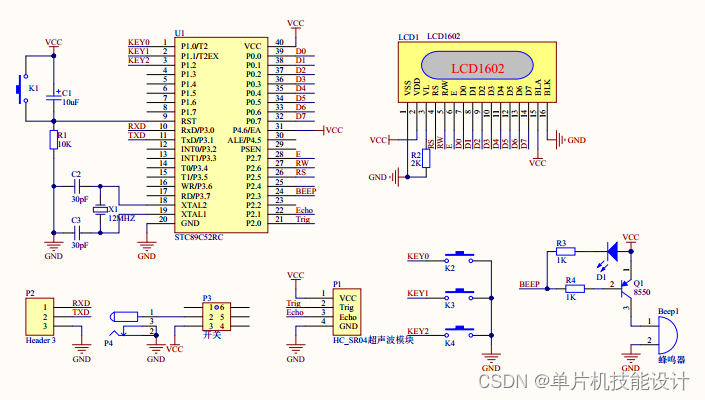
电路图:
实物图:

程序源码:
#include "reg52.h"
#include "lcd1602.h"
#include "delay.h"
#include "HCSR04.h"
#include "key.h"
sbit beep = P2^3; //蜂鸣器控制脚
bit flag_timer = 0; //定时时间到标志位
bit flag_beep = 0; //报警标志位
short Dis_up = 50; //距离上限 默认50cm
/************************************************************************
* 函数: void Timer0Init(void)
* 描述: 定时器1初始化函数
* 参数: none.
* 返回: none.
* 备注:定时2ms 12MHz
************************************************************************/
void Timer1Init(void) //2毫秒@12MHz
{
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x10; //设置定时器模式
TL1 = 0xCD; //设置定时初值
TH1 = 0xF8; //设置定时初值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //开始计数
EA = 1; //开总中断
}
void main(void)
{
unsigned char var = 0;
unsigned int distance; //距离
Timer1Init(); //2毫秒@12MHz
HCSR04_Init();
Lcd1602_Init(); //LCD1602液晶初始化
Lcd1602_String(0,0,"Distance: ");
while(1)
{
if(flag_timer==1) //600毫秒赋一次值 flag_timer是标志位
{
flag_timer = 0; //清除标志 等待下一次600ms
if(HCSR04_Count(&distance)==0) //测距 将距离值传递给distance
{
Lcd1602_Write_Com(0x80+9);
Lcd1602_Write_Data(distance%1000/100+0x30);
Lcd1602_Write_Data(distance%1000%100/10+0x30);
Lcd1602_Write_Data(distance%1000%100%10+0x30);
Lcd1602_Write_Data('c');
Lcd1602_Write_Data('m');
}
else
{
Lcd1602_Write_Com(0x80+9);
Lcd1602_Write_Data('-');
Lcd1602_Write_Data('-');
Lcd1602_Write_Data('-');
Lcd1602_Write_Data('c');
Lcd1602_Write_Data('m');
}
}
KEY_Set();
if(distance<Dis_up) //当前距离小于上限
{
var++;
if(var>5) //为了防止误差多次判断距离是否超限
{
var = 0;
flag_beep = 1; //开报警标志 执行报警程序在定时器中断
}
}
else
{
var = 0;
flag_beep = 0; //关报警标志位
}
}
}
//定时器1中断服务函数
void tm1_isr() interrupt 3 using 1
{
static unsigned int cnt=0,cnt1;
TF1 = 0;
TL1 = 0x30; //设置定时初值
TH1 = 0xF8; //设置定时初值
if(cnt++ >= 300) //2ms*300 =600ms
{
cnt = 0;
flag_timer = 1; //600ms到 赋值标志为1 600ms赋一次 600ms不是必须的 可以自己修改
}
if(cnt1++>=200) //2ms*200 =400ms
{
cnt1 = 0;
if(flag_beep==1) //报警标志位打开
beep = ~ beep; //蜂鸣器控制脚取反 400ms取反一次 产生滴滴滴 响声 而不是一直长鸣
else
beep = 1; //高电平关闭报警
}
}软件免费下载地址:
1、Proteus仿真软件
文件内容:Proteus7.8安装包、Proteus8.6安装包、Proteus.8.10安装包、Proteus Professional 8.11 SP0安装包
链接:https://pan.baidu.com/s/11LNUZ9BJXWvXf1C4dPc3_w
提取码:2756
2、Keil4 C51软件安装包
链接:https://pan.baidu.com/s/1CTZBqDsPsyIbjCIjI_birA
提取码:sy2a
文件下载:
链接:https://pan.baidu.com/s/1-meRpYAIB4C5ik9lw7TGdw?pwd=f8fh
提取码:f8fh
















 4968
4968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











