







YB菜菜的毫米波雷达自学之路(三)——浅谈雷达信号模型建立2
前提说明
在之前的信号模型建立中忽略了雷达测角能力,当雷达收发天线数超过1根时,则雷达具备基本的测角能力。此时接受到的雷达信号模型将在原本的基础上增加了一个相位偏差。
回顾与准备
1、 在整个描述过程中,目标相对于雷达属于远场,即目标回波近似平行返回雷达接收天线。
2、默认雷达发射天线与接收天线位置近似为同一位置,即为集中式。
3、 在(一)中,详细的给出了雷达距离速度的信号表达式,在这个基础上可以得到一般的雷达信号通用表示:
s
(
t
)
=
a
(
t
)
e
x
p
(
j
(
2
∗
p
i
∗
f
o
t
+
ϕ
x
(
t
)
)
)
(
1
)
s(t)=a(t)exp(j(2*pi*f_{o}t+\phi_{x}(t))) (1)
s(t)=a(t)exp(j(2∗pi∗fot+ϕx(t)))(1)
1. 一维阵列下的雷达信号模型
1.1 单发射/波束合成模式下的一维阵列信号
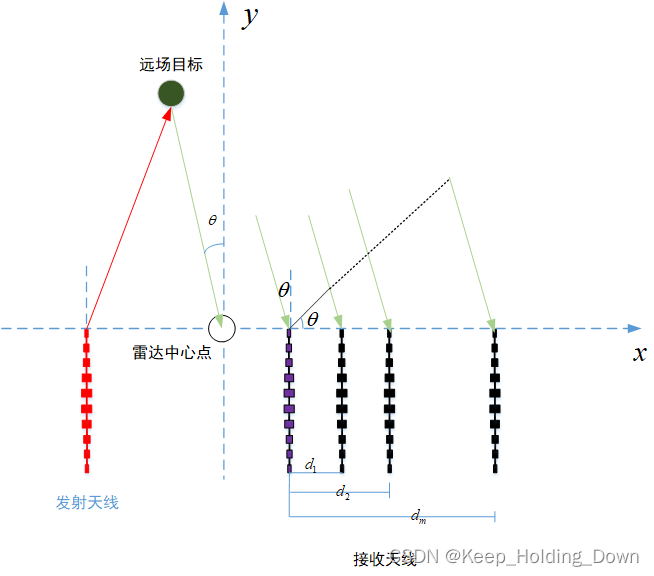
图1 一维天线阵列(单发射/波束合成模式)
如图1所示,假设 红色为发射天线组,黑色为接收天线组(共m+1个)且天线排布在同一个维度。远方的目标区域与天线组构成了XOY平面,其中雷达中心点定义为圆点,天线组布局维度为X轴,雷达探测前方定义为Y轴。假设一个远场目标,相对于雷达中心之间的角度为 θ \theta θ, 且我们定义紫色天线为雷达接收天线的基准天线,其于接收天线相对于基准天线之间的间距分别为: d 1 , d 2 , … , d m d_{1},d_{2},\dots,d_{m} d1,d2,…,dm
1.1.1单发射天线(或BF)与波束合成发射模式关系
在雷达发射体制中,无论雷达存在多少个发射天线,当所有发射天线同时发射相同波形参数的Chirp信号时,可等价成 雷达仅有一个发射天线在向外发射雷达信号。
(注:不同的是波束方向图,和发射信号的能量)
信号表达式:
(1):雷达发射信号经过目标反射到达基准天线的信号表达式为
s
(
t
)
s(t)
s(t):
s
(
t
)
=
A
e
x
p
(
j
(
2
∗
p
i
∗
f
o
t
+
ϕ
x
(
t
)
)
)
(
1
)
s(t)=Aexp(j(2*pi*f_{o}t+\phi_{x}(t))) (1)
s(t)=Aexp(j(2∗pi∗fot+ϕx(t)))(1)
(2) 根据几何关系,波束到达其他天线的路程差为:
L
=
d
m
s
i
n
(
θ
)
(
2
)
L=d_{m}sin(\theta) (2)
L=dmsin(θ)(2)
进一步我们可以得到,信号到达每个天线的时延为:
τ
=
L
/
c
=
d
m
s
i
n
(
θ
)
/
c
(
3
)
\tau=L/c=d_{m}sin(\theta)/c (3)
τ=L/c=dmsin(θ)/c(3)
(3)信号到达每个天线的时间不同,本质上就是接收到的相位不同,即,第m个接收天线接收到的信号相位相比于基准天线接收到的信号相位,存在一个差值,这个差值为:
Δ
ϕ
m
=
2
∗
p
i
∗
f
o
τ
=
2
∗
p
i
∗
f
o
d
m
s
i
n
(
θ
)
c
=
2
∗
p
i
∗
d
m
s
i
n
(
θ
)
λ
(
4
)
\Delta\phi_{m} = 2*pi*f_{o}\tau =2*pi*\frac{f_{o}d_{m}sin(\theta)}{c}=\frac{2*pi*d_{m}sin(\theta)}{\lambda} (4)
Δϕm=2∗pi∗foτ=2∗pi∗cfodmsin(θ)=λ2∗pi∗dmsin(θ)(4)
此时,第m个天线的接收信号为:
s
(
t
)
m
=
s
(
t
)
∗
e
x
p
(
j
∗
2
∗
p
i
∗
d
m
s
i
n
(
θ
)
λ
)
(
5
)
s(t)_{m}=s(t)*exp(\frac{j*2*pi*d_{m}sin(\theta)}{\lambda}) (5)
s(t)m=s(t)∗exp(λj∗2∗pi∗dmsin(θ))(5)
(4)进一步,在BF形式/单天线发射的模式下,当发射天线发射一次雷达波后,经过目标反射,所有天线接收到的信号组为:
S ( t ) = s ( t ) [ 1 , e x p ( j ∗ 2 ∗ p i ∗ d 1 s i n ( θ ) λ ) , e x p ( j ∗ 2 ∗ p i ∗ d 2 s i n ( θ ) λ ) , … , e x p ( j ∗ 2 ∗ p i ∗ d m s i n ( θ ) λ ) ] ( 6 ) S(t)=s(t)[ 1,exp(\frac{j*2*pi*d_{1}sin(\theta)}{\lambda}) ,exp(\frac{j*2*pi*d_{2}sin(\theta)}{\lambda}) ,\dots,exp(\frac{j*2*pi*d_{m}sin(\theta)}{\lambda}) ] (6) S(t)=s(t)[1,exp(λj∗2∗pi∗d1sin(θ)),exp(λj∗2∗pi∗d2sin(θ)),…,exp(λj∗2∗pi∗dmsin(θ))](6)
(5)从第m个接收天线角度出发:
假设发射N个chirp信号n=1,2,…,N;目标初始距离为
R
o
R_{o}
Ro,速度为
v
v
v,Chirp周期为
T
c
T_{c}
Tc,目标距离雷达中心的偏移角度为
θ
\theta
θ,则任意一次接收信号表达式为:
S n , m = e x p ( j ∗ 2 ∗ p i ∗ ( ( 2 ∗ k ∗ ( R o + v ( n − 1 ) T c ) c + 2 v f o c ) t + 2 ∗ f o ∗ ( R o + v ( n − 1 ) T c ) c ) ∗ e x p ( j ∗ 2 ∗ p i ∗ d m s i n ( θ ) λ ) ( 7 ) S_{n,m}=exp(j*2*pi*( (\frac{2*k*(R_{o}+v(n-1)T_{c})}{c}+\frac{2vf_{o}}{c})t+\frac{2*f_{o}*(R_{o}+v(n-1)T_{c})}{c} ) * exp(\frac{j*2*pi*d_{m}sin(\theta)}{\lambda}) (7) Sn,m=exp(j∗2∗pi∗((c2∗k∗(Ro+v(n−1)Tc)+c2vfo)t+c2∗fo∗(Ro+v(n−1)Tc))∗exp(λj∗2∗pi∗dmsin(θ))(7)
1.2 MIMO模型下一维阵列信号
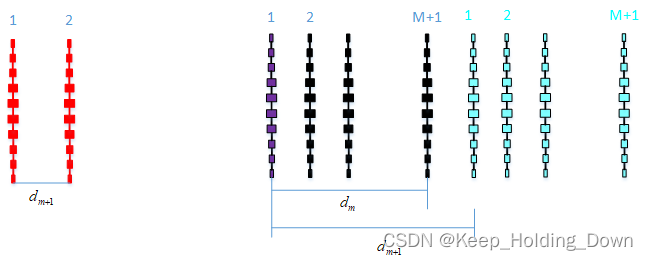
图2 MIMO 一维阵列
MIMO技术是通过相位等效的方式对接收天线进行虚拟扩展。假设有
M
t
M_{t}
Mt个发射天线和
M
r
M_{r}
Mr个接收天线(均匀排布),那么通过MIMO技术就能等效成
M
t
∗
M
r
M_{t}*M_{r}
Mt∗Mr个接收天线(这里不考虑天线相位冗余)。
如图2,天线阵列中实发射天线数为2,实接收天线数为M+1。那么当雷达模式为MIMO时,那么接收天线数最大可等效成2*(M+1)个。
(注:发射天线之间的间距要大于或等于
d
m
+
1
d_{m+1}
dm+1。否则存在相位冗余,等效的天线数将少于2*(M+1))
1.2.1MIMO模式下雷达信号表达式
我们可以从两个角度对雷达信号表达式进行推导:
单纯从接收天线角度
从图2可以知道,一旦我们知道发射天线之间的间距,那么我们就能够推出虚拟天线的位置。比如图2中2号发射天线相对于1号发射天线右偏
d
m
+
1
d_{m+1}
dm+1的距离,那么接收天线1的虚拟位置必然出现在相对于1号天线右偏
d
m
+
1
d_{m+1}
dm+1的位置。
那么我们可以等效有1个发射天线和2*(M+1)个接收天线。此时信号的公式与公式(3)完全相同。
但是这种等效会带来很多问题:
1)完全忽略了发射信息模型,不利于后续研究信号编码信号调试
2)与真实的接收数据偏差较大,不便于仿真
收发角度共同考虑
这里我们以TDM-MIMO为例进行说明。在TDM-MIMO模式下,每个天线发射相同的信号,唯一不同的是发射信号的时间。
(1)发射信号模型
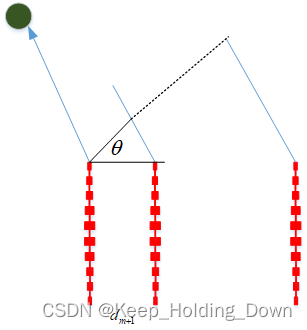
图3 发射模型
如图3,由于是远场,目标相遇于接收天线和目标相对于发射天线可以近似相同。
假设第一个天线发射信号,到达目标时,这个信号被定义为
y
(
t
)
y(t)
y(t)。
第二个天线发射信号,到达目标时,这个信号被定义为
y
(
t
)
′
y(t)^{'}
y(t)′。
那么,发射信号到达目标存在的差主要由天线与目标之间的距离不同引起的,根据几何关系,可以得到
y
(
t
)
′
=
y
(
t
)
∗
e
x
p
(
j
2
∗
p
i
∗
d
m
+
1
∗
s
i
n
(
θ
)
λ
)
(
8
)
y(t)^{'}=y(t)*exp(j\frac{2*pi*d_{m+1}*sin(\theta)}{\lambda}) (8)
y(t)′=y(t)∗exp(jλ2∗pi∗dm+1∗sin(θ))(8)
(2) 基准接收天线接收信号
第一个发射天线发射的信号,经过目标反射后,被基准接收天线接收后的信号为
s
(
t
)
s(t)
s(t)。
第二个发射天线发射的信号,经过目标反射后,被基准接收天线接收后的信号为
s
(
t
)
′
s(t)^{'}
s(t)′。
那么他们之间的关系为;
s
(
t
)
′
=
s
(
t
)
∗
e
x
p
(
j
2
∗
p
i
∗
d
m
+
1
∗
s
i
n
(
θ
)
λ
)
(
9
)
s(t)^{'}=s(t)*exp(j\frac{2*pi*d_{m+1}*sin(\theta)}{\lambda}) (9)
s(t)′=s(t)∗exp(jλ2∗pi∗dm+1∗sin(θ))(9)
(3)多发多收模型
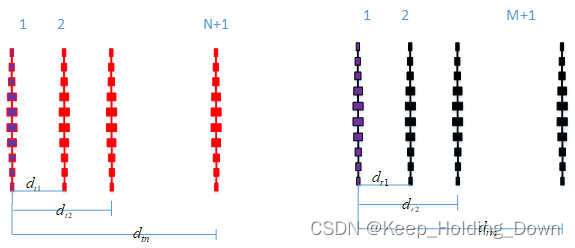
图4 收发天线
如图4,假设有N+1个发射天线,M+1个接收天线,并定义1号天线为基准天线。
发射天线之间的间距为
d
t
1
,
d
t
2
,
…
,
d
t
n
d_{t1},d_{t2},\dots,d_{tn}
dt1,dt2,…,dtn
根据中的关系,任意一个发射天线发射电磁波,到达目标后的信号可表示为:
y
(
t
)
t
n
=
y
(
t
)
∗
e
x
p
(
j
2
∗
p
i
∗
d
t
n
∗
s
i
n
(
θ
)
λ
)
(
10
)
y(t)_{tn}=y(t)*exp(j\frac{2*pi*d_{tn}*sin(\theta)}{\lambda}) (10)
y(t)tn=y(t)∗exp(jλ2∗pi∗dtn∗sin(θ))(10)
该信号再经过目标反射到达接收天线,则任意一个接收天线的信号表达式为:
s
(
t
)
m
=
y
(
t
)
t
n
∗
e
x
p
(
j
2
∗
p
i
∗
d
r
m
∗
s
i
n
(
θ
)
λ
)
(
11
)
s(t)_{m} =y(t)_{tn}*exp(j\frac{2*pi*d_{rm}*sin(\theta)}{\lambda}) (11)
s(t)m=y(t)tn∗exp(jλ2∗pi∗drm∗sin(θ))(11)
综上:
在TDM-MIMO模式下,任意一个发射天线tn发射信号后,经过目标反射被任意一个接收天线rm接收,则信号的表达式为:
S
(
t
)
t
n
,
r
m
=
s
(
t
)
∗
e
x
p
(
j
2
∗
p
i
∗
d
t
n
∗
s
i
n
(
θ
)
λ
)
∗
e
x
p
(
j
2
∗
p
i
∗
d
r
m
∗
s
i
n
(
θ
)
λ
)
(
12
)
S(t)_{tn,rm}=s(t)*exp(j\frac{2*pi*d_{tn}*sin(\theta)}{\lambda}) *exp(j\frac{2*pi*d_{rm}*sin(\theta)}{\lambda}) (12)
S(t)tn,rm=s(t)∗exp(jλ2∗pi∗dtn∗sin(θ))∗exp(jλ2∗pi∗drm∗sin(θ))(12)
其中,
s
(
t
)
s(t)
s(t)就是1发1收时的信号模型。
在一些书籍中,通常用矩阵来表示:
将发射天线组定义为:
A
(
θ
)
=
[
1
,
a
2
(
θ
)
,
…
,
a
t
n
(
θ
)
]
A(\theta)=[1,a_{2}(\theta),\dots,a_{tn}(\theta) ]
A(θ)=[1,a2(θ),…,atn(θ)]
将接收天线组定义为:
B
(
θ
)
=
[
1
,
b
2
(
θ
)
,
…
,
b
r
m
(
θ
)
]
B(\theta)=[1,b_{2}(\theta),\dots,b_{rm}(\theta) ]
B(θ)=[1,b2(θ),…,brm(θ)]
信号模型为:
A
⨂
B
A\bigotimes B
A⨂B
其实任意一个信号和公式(12)是一样的。只是表达方式不一样。
1.3 最大视角与角度分辨率
1.3.1 最大视角
根据前文我们知道,来自目标的信号必须经过
d
s
i
n
(
θ
)
dsin(\theta)
dsin(θ)的额外距离才能到达相邻的接收天线,距离差带来的相位差为:
ϕ
=
2
∗
p
i
λ
d
s
i
n
(
θ
)
\phi=\frac{2*pi}{\lambda}dsin(\theta)
ϕ=λ2∗pidsin(θ)
则可以根据相位差得到角度:
θ
=
s
i
n
−
1
(
ϕ
λ
2
∗
p
i
∗
d
)
(
13
)
\theta = sin^{-1}(\frac{\phi \lambda}{2*pi*d}) (13)
θ=sin−1(2∗pi∗dϕλ)(13)
通常相位差的取值范围为
(
−
p
i
,
p
i
)
(-pi,pi)
(−pi,pi),此时雷达无模糊视角,因此我们可以得到,雷达无模糊视角与天线布局之间的关系:
θ
=
s
i
n
−
1
(
λ
2
∗
d
)
(
13
)
\theta = sin^{-1}(\frac{\lambda}{2*d}) (13)
θ=sin−1(2∗dλ)(13)
当
d
=
λ
2
d=\frac{\lambda}{2}
d=2λ时,
θ
=
9
0
o
\theta=90^{o}
θ=90o.
1.3.2 角度分辨率
假设天线均匀分布,天线之间的间距为
d
d
d,天线数为N个。
(1)目标1到达接收天线的相位差为:
ϕ
1
=
2
∗
p
i
λ
∗
d
s
i
n
(
θ
)
(
14
)
\phi_{1} =\frac{2*pi}{\lambda}*dsin(\theta) (14)
ϕ1=λ2∗pi∗dsin(θ)(14)
(2)第二个目标相对于第一个目标存在一个角度偏差
Δ
θ
\Delta\theta
Δθ,则相位差为:
ϕ
2
=
2
∗
p
i
λ
∗
d
s
i
n
(
θ
+
Δ
θ
)
(
15
)
\phi_{2} =\frac{2*pi}{\lambda}*dsin(\theta+\Delta\theta) (15)
ϕ2=λ2∗pi∗dsin(θ+Δθ)(15)
(3)则两个物体的空间频差为:
Δ
ϕ
=
2
∗
p
i
λ
∗
d
s
i
n
(
θ
+
Δ
θ
)
−
2
∗
p
i
λ
∗
d
s
i
n
(
θ
)
≈
2
∗
p
i
λ
c
o
s
(
θ
)
Δ
θ
(
16
)
\Delta\phi =\frac{2*pi}{\lambda}*dsin(\theta+\Delta\theta) - \frac{2*pi}{\lambda}*dsin(\theta)\approx \frac{2*pi}{\lambda} cos(\theta)\Delta\theta (16)
Δϕ=λ2∗pi∗dsin(θ+Δθ)−λ2∗pi∗dsin(θ)≈λ2∗picos(θ)Δθ(16)
(4)一般的,经过角度FFT后,频率的分辨率为
2
p
i
N
\frac{2pi}{N}
N2pi,因此可以得到空间频率变化于接收天线之间的关系:
Δ
ϕ
=
2
∗
p
i
λ
c
o
s
(
θ
)
Δ
θ
>
2
∗
p
i
N
(
17
)
\Delta\phi =\frac{2*pi}{\lambda} cos(\theta)\Delta\theta >\frac{2*pi}{N} (17)
Δϕ=λ2∗picos(θ)Δθ>N2∗pi(17)
(5) 进一步,我们可以得到角度分辨率与天线之间的关系:
Δ
θ
>
λ
N
d
c
o
s
(
θ
)
(
18
)
\Delta\theta>\frac{\lambda}{Ndcos(\theta)} (18)
Δθ>Ndcos(θ)λ(18)
(6)总结
事实上,天线的排布并非均匀的,但是根据公式(18)我们可以确定,雷达的角度分辨率和Nd相关。
实际上Nd就是雷达天线的孔径,通常以D表示。
因此当天线分布均匀时(
d
=
λ
2
d=\frac{\lambda}{2}
d=2λ),我们可以近似认为雷达的角度分辨率为:
Δ
θ
=
λ
D
=
2
N
\Delta\theta = \frac{\lambda}{D}=\frac{2}{N}
Δθ=Dλ=N2
当非均匀分布时,则根据瑞丽判据:
Δ
θ
=
1.22
∗
λ
D
\Delta\theta =1.22* \frac{\lambda}{D}
Δθ=1.22∗Dλ
2、平面阵列下的雷达信号模型
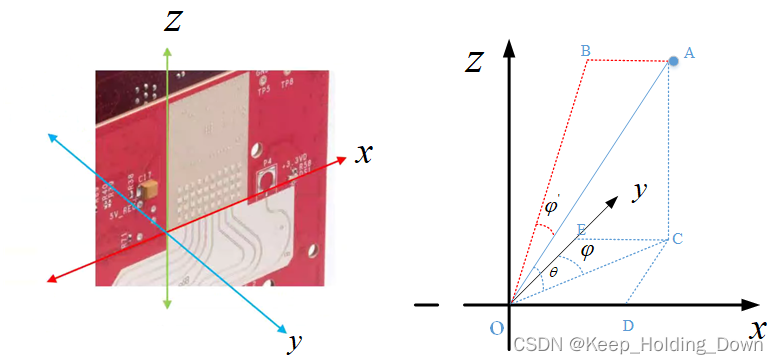
图5 二维平面示意图
2.1 目标俯仰角与回波角之间的关系
什么是二维平面阵
当实接收天线或者虚拟接收天线不全在一个维度时,我们称为平面阵,即:
如图5左所示,原本一维阵是指所有接收天线/虚拟接收天线 均在X轴上分布,二维平面阵则指,存在接收天线或虚拟接收天线在Z轴方向上分布。
此时雷达具备了获得目标俯仰角的能力。
俯仰平面和方位平面
根据日常习惯,
我们定义XOY平面为俯仰平面,当目标高于XOY,即在Z中的正半轴,说明目标在雷达中心的上方(在人类视角的上方),目标俯仰角为正。否则目标在视角下方,即目标俯仰角为负。
同理,定义一个平面YOZ为方位平面,当目标在ZOY右侧(X轴正半轴),则说明目标在雷达(视角)右方,否则在左方。
目标俯仰/方位角与信号入射夹角之间的关系
(1)如前面所述,在一维阵列中,天线排布在x轴上,相位差计算公式中的角度 θ \theta θ是目标回波与y轴线(天线布局方向x轴的垂线)的夹角,该夹角与目标的方位角正好相等。因此通过公式求出的 θ \theta θ线夹角等于目标方位角。
(2)在二维平面中,相位差公式的 θ \theta θ角不在是入射信号与轴线的夹角,而是与面的夹角,因此目标的方位/俯角角,与,公式中的夹角存在差异。
(3)假设,如图5右,存在一个目标A,那么我们认为它的俯仰角为 θ \theta θ,方位角为 ϕ \phi ϕ,即在我们视角的右上方。且,我们假设,x轴天线(方位天线)与基准天线之间的方位间距为 d x d_{x} dx,z轴天线(俯仰天线)与基准天线之间的俯仰间距为 d z d_{z} dz,那么按照定义,方位天线相差角为 ϕ ′ \phi^{'} ϕ′,俯仰天线相差角为 θ ′ \theta^{'} θ′。
(4)按照公式(9)
我们可以得到任意一个天线与基准天线之间的相位差为:
s
(
t
)
′
=
s
(
t
)
∗
e
x
p
(
j
∗
2
∗
p
i
(
d
x
s
i
n
(
ϕ
′
)
+
d
z
s
i
n
(
θ
′
)
λ
)
)
(
19
)
s(t)^{'}=s(t)*exp(j*2*pi(\frac{d_{x}sin(\phi^{'})+d_{z}sin(\theta^{'})}{\lambda} )) (19)
s(t)′=s(t)∗exp(j∗2∗pi(λdxsin(ϕ′)+dzsin(θ′)))(19)
(6)由几何关系获得目标方位角和相位差夹角之间的关系:
s
i
n
(
θ
′
)
=
s
i
n
(
θ
)
sin(\theta^{'})=sin(\theta)
sin(θ′)=sin(θ)
s
i
n
(
ϕ
′
)
=
s
i
n
(
ϕ
)
∗
c
o
s
(
θ
)
sin(\phi^{'})=sin(\phi)*cos(\theta)
sin(ϕ′)=sin(ϕ)∗cos(θ)
因此 在二维平面阵列中,一个目标A(
θ
\theta
θ,
ϕ
\phi
ϕ)的反射信号入射到接收天线后,接收信号的表达式可写成:
s
(
t
)
′
=
s
(
t
)
e
x
p
(
j
∗
2
∗
p
i
(
d
x
s
i
n
(
ϕ
)
∗
c
o
s
(
θ
)
+
d
z
s
i
n
(
θ
)
λ
)
)
(
20
)
s(t)^{'}=s(t)exp(j*2*pi(\frac{d_{x}sin(\phi)*cos(\theta)+d_{z}sin(\theta)}{\lambda} )) (20)
s(t)′=s(t)exp(j∗2∗pi(λdxsin(ϕ)∗cos(θ)+dzsin(θ)))(20)
2.2 MIMO下平面阵列信号
根据上面的叙述,我们知道,平面阵列和一维阵列,除了角度上存在偏差,即:在平面阵列中,目标的方位角和俯仰角,与方位天线/俯仰天线计算的相位差角之间存在转换关系。在其他方面完全一致,因此本质上,一维阵列中的收发信号推导完全适用于平面阵列。
假设一个目标(
ϕ
\phi
ϕ,
θ
\theta
θ),存在M个发射天线,其中
d
m
x
d_{mx}
dmx表示第m个天线相对于基准发射天线方位维度上的间距,
d
m
z
d_{mz}
dmz表示第m个天线相对于基准发射天线俯仰维度上的间距。
存在N个接收天线,其中
d
n
x
d_{nx}
dnx表示第n个天线相对于基准接收天线方位维度上的间距,
d
n
z
d_{nz}
dnz表示第n个天线相对于基准接收天线俯仰维度上的间距。
假设基准发射天线发射信号被基准接收天线接收,接收信号的表达式为
s
(
t
)
s(t)
s(t),
那么任意一个发射天线m发射信号后被任意一个接收天线n接收,则信号的表达式为:
S ( t ) m , n = s ( t ) ∗ e x p ( j ∗ 2 ∗ p i ( d m x s i n ( ϕ ) ∗ c o s ( θ ) + d m z s i n ( θ ) λ ) ) ∗ e x p ( j ∗ 2 ∗ p i ( d n x s i n ( ϕ ) ∗ c o s ( θ ) + d n z s i n ( θ ) λ ) ) S(t)_{m,n}=s(t)*exp(j*2*pi(\frac{d_{mx}sin(\phi)*cos(\theta)+d_{mz}sin(\theta)}{\lambda} ))* exp(j*2*pi(\frac{d_{nx}sin(\phi)*cos(\theta)+d_{nz}sin(\theta)}{\lambda} )) S(t)m,n=s(t)∗exp(j∗2∗pi(λdmxsin(ϕ)∗cos(θ)+dmzsin(θ)))∗exp(j∗2∗pi(λdnxsin(ϕ)∗cos(θ)+dnzsin(θ)))















 2343
2343











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









