







%------------------读取点云------------------------
pc0 = pcread('1.pcd') ;
pc1 = pcread('2.pcd') ;
%pcshowpair(pcloud,pcloud1);%创建一个可视化描述两个输入点云之间的差异。
%pcshow(pc0);%使用存储在点云对象中的位置和颜色显示点。
%------------------显示第一个点云------------------
xyzPoints=[pc0.Location(:,1) pc0.Location(:,2) pc0.Location(:,3)];%点云x, y,和z位置,
%指定为M-或M-按-N-乘以-3数字矩阵。这个xyzPoints数值矩阵M或M-按-N [x,y,z]分。
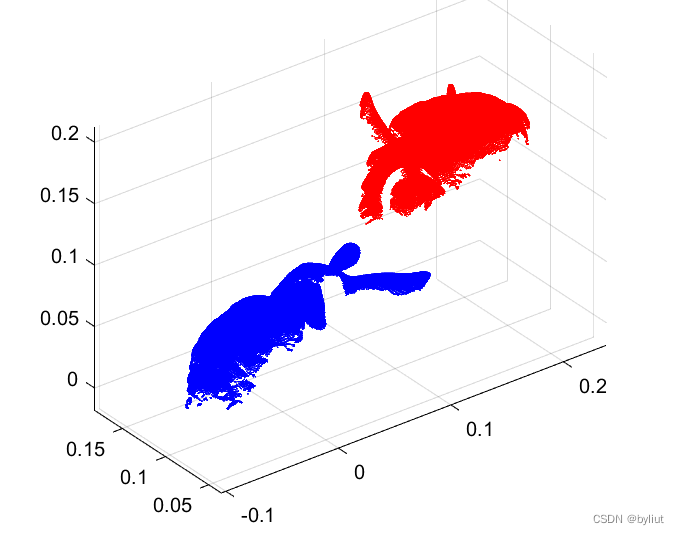
pcshow(xyzPoints,[1,0,0]);%对显示的点云自定义颜色
hold on;
%------------------显示第二个点云------------------
XYZPoints=[pc1.Location(:,1) pc1.Location(:,2) pc1.Location(:,3)];
pcshow(XYZPoints,[0,0,1]);
hold on;
%axis off%设置是否显示坐标系亲测可用。
显示效果:
CSDN的编辑界面太难用了。。。















 2804
2804











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









