





PID理论
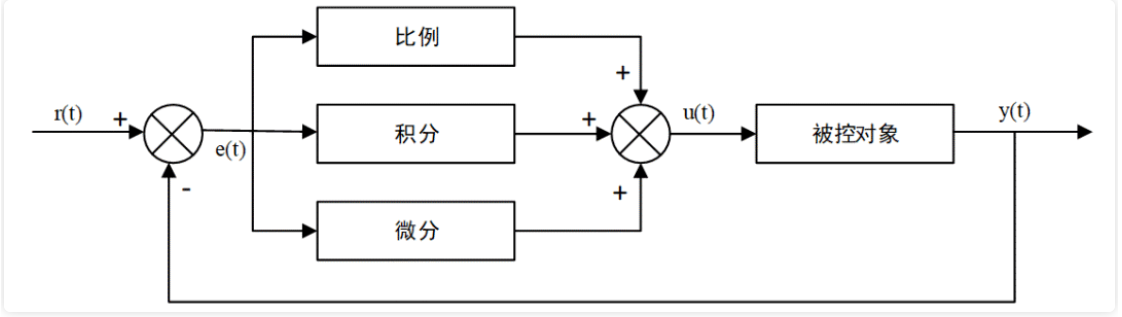
- 将偏差的比例(proportion)、积分(integral)、微分(derivative),通过线性组合构成控制量,用控制量对被控对象进行控制,这样的控制器称为PID控制器。在连续空间中,我们通常探讨模拟PID的控制原理,如图所示:
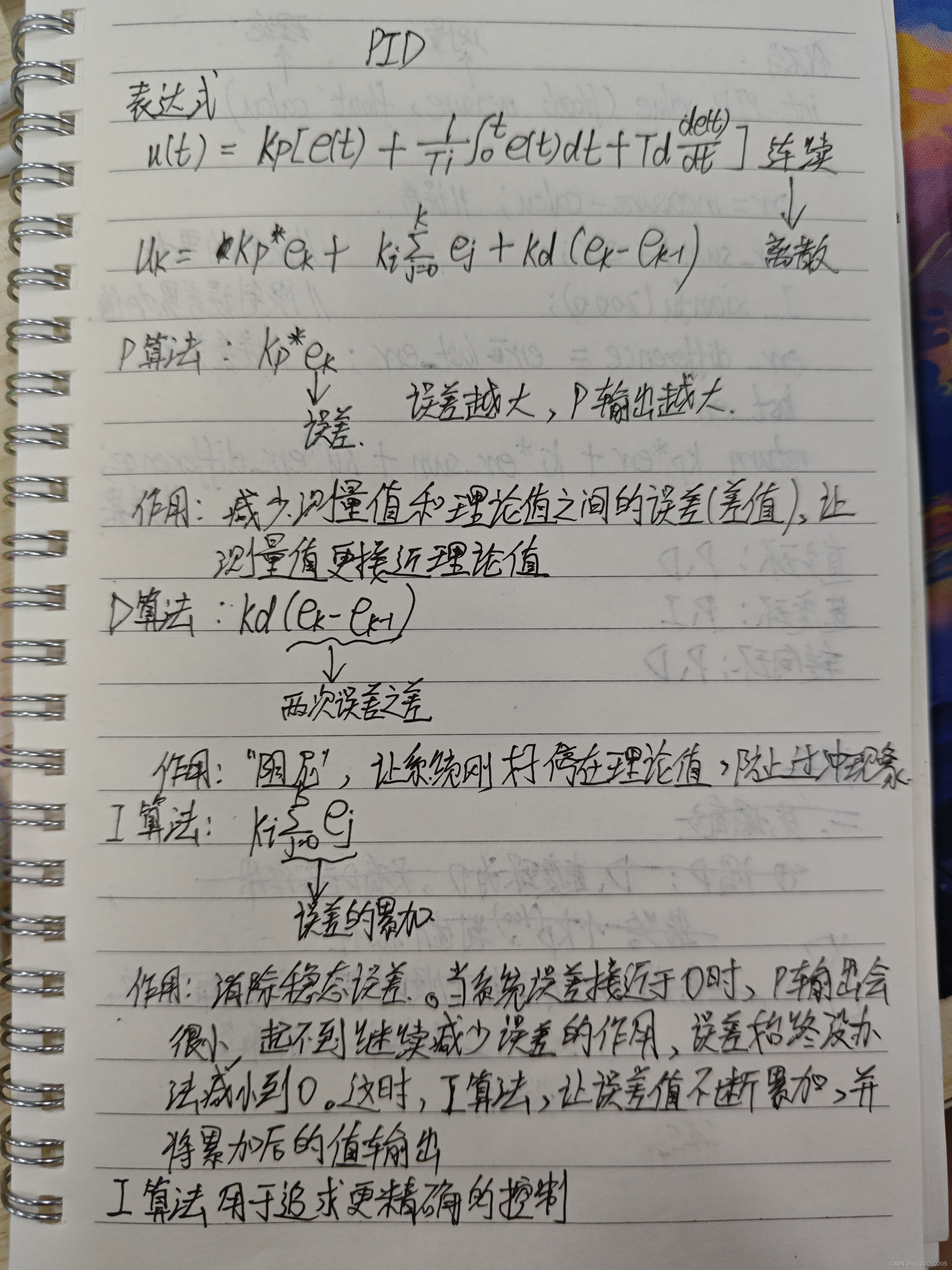
以下是我的一些学习笔记


以下是我的一些学习笔记
 571
2975
571
2975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























