







脑机接口(BCI)技术在医疗和辅助设备领域展现出巨大潜力,但其在日常生活中的应用仍然面临多重挑战。这些挑战主要集中在BCI解码器的训练上,传统的解码器训练依赖于监督学习,需要明确的标签数据,这往往要求用户在受控环境中进行特定的动作。然而,这种训练方式存在几个显著问题,如训练集与测试集之间的脑信号差异、训练环境与日常生活环境的差异,以及解码器性能随时间波动带来的更新需求。为了解决这些问题,研究人员开发了多种策略来减少解码器的训练时间或更新频率,如迁移学习和无监督学习。然而,这些方法在应对复杂运动任务和长期使用中的解码器性能下降方面仍存在局限。

自适应脑机接口
法国研究团队Rouanne等人提出了一种名为“自适应脑机接口”(aaBCI)的创新方法。该方法通过实时检测用户的神经活动,评估BCI执行器执行的动作是否符合用户意图。基于BCI控制任务表现的神经相关性,系统自动生成标签数据,从而可以自适应地训练或更新BCI解码器。这一过程使得BCI执行器在被自由控制的同时,能够自适应地进行训练或更新,减少了对受控训练环境的依赖。这一突破性的aaBCI方法标志着BCI技术向实际应用迈出了重要一步。研究团队期待通过进一步的临床试验,将这一技术应用于更复杂的BCI系统,并最终服务于广泛的患者群体。aaBCI框架如图1所示。
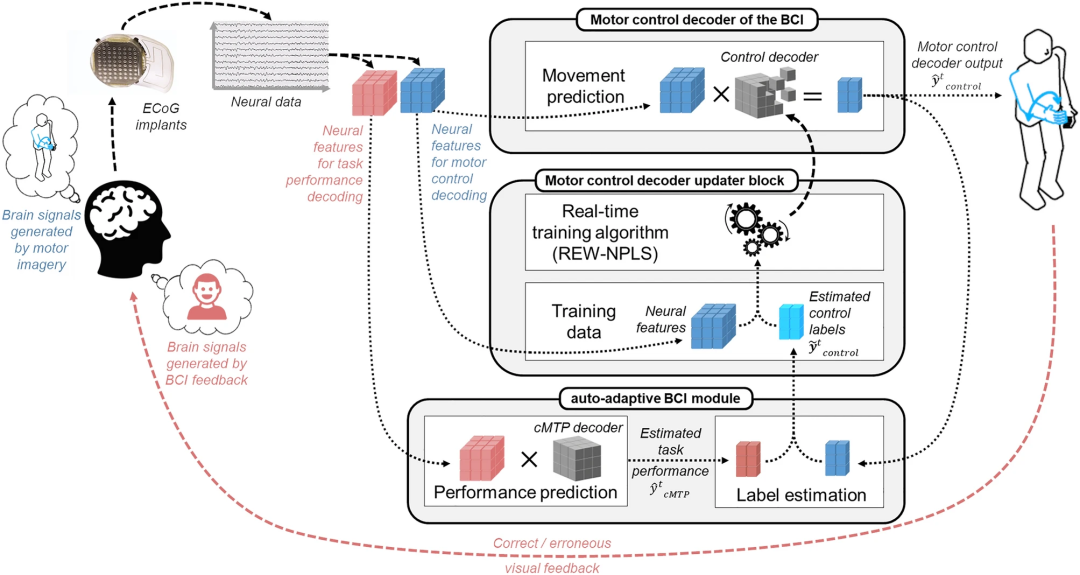
Fig1. aaBCI框架的示意图。除了大多数BCI共有的控制解码器模块和更新器模块外,aaBCI还具有一个自适应BCI模块。该aaBCI模块负责检测连续时间内的运动任务表现的神经相关性(cMTP),以及基于cMTP解码器的输出和控制解码器的输出估算控制解码器的标签。
在aaBCI的发展过程中,错误相关电位(ErrP)已被用于控制任务表现的神经相关性,但仅限于分类问题的解码器更新。高级运动BCI因其需要较高的控制和反馈速率,面临更大的挑战。特别是对于具有连续输出的运动BCI,传统的事件锁定神经信号并不适用。相反,连续时间内的运动任务表现(cMTP)评估被认为是更为合适的方案。与事件锁定的运动任务表现(eMTP)相比,cMTP能够在每个时间点上提供更加实时的表现评估,这对复杂任务尤其重要。
然而,cMTP神经相关性的最佳大脑区域尚未确定。尽管ErrP被最为的广泛研究,但其所涉及的大脑区域如内侧和中额回等,与当前最先进的运动BCI使用的感觉运动皮层并不兼容。现有的高级运动BCI主要依赖于感觉运动皮层的神经活动来实现精确控制,因此在感觉运动皮层中检测cMTP神经相关性是此研究的首要目标。
Rouanne等人提出的aaBCI框架能够从神经记录中估算cMTP,并通过实时的训练算法在线更新BCI控制解码器。这一框架不仅在理论上提出了复杂运动BCI的自适应控制方案,还通过模拟在线使用,进行了概念验证。为了验证这一技术创新,研究团队分析了来自一名四肢瘫痪者的两个ECoG数据集,一个用于多类离散输出BCI(范式一),另一个用于二维连续输出BCI的研究(范式二)。范式示意图见图2.
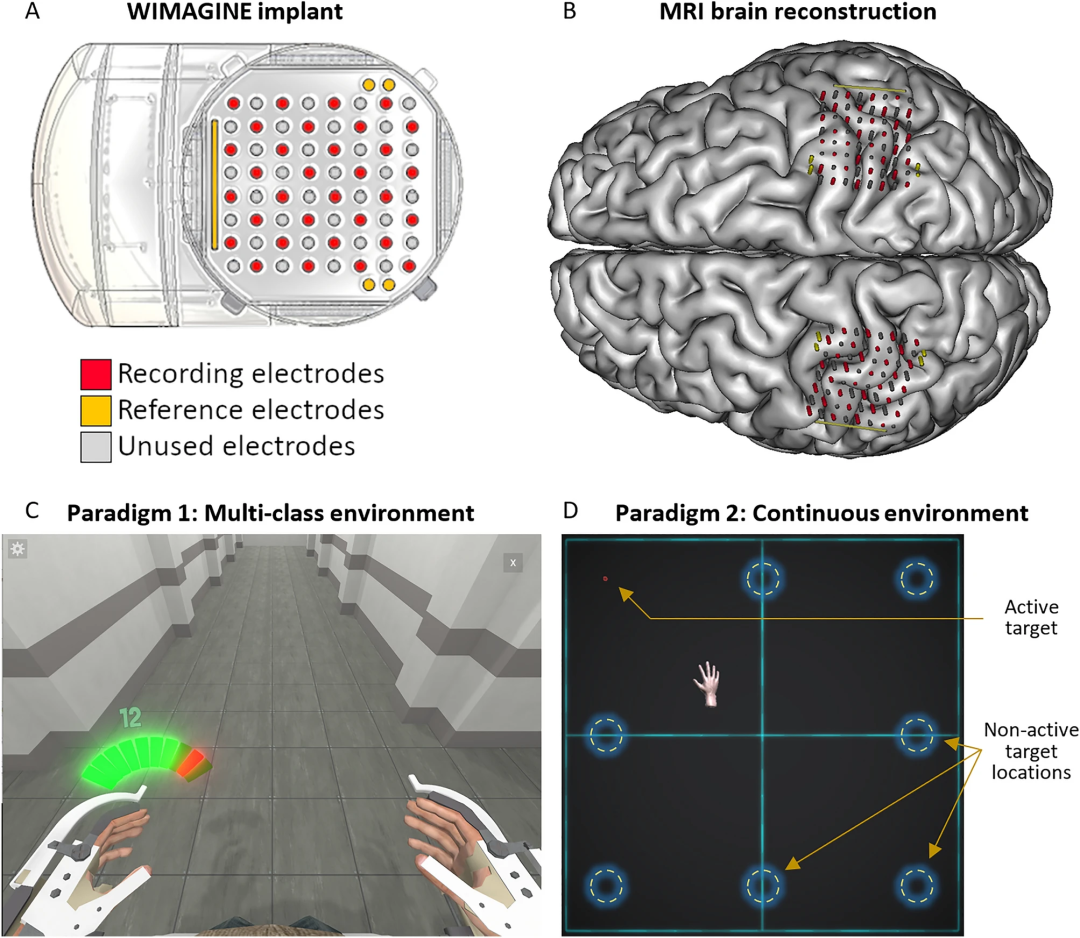
Fig2. (A) 无线 64 通道皮质电图(ECoG)WIMAGINE植入物的示意图。(B) 根据MRI重建的受试者大脑,每个 WIMAGINE 植入体电极在左右感觉运动皮层上的位置。(C) 多类离散BCI实验(范式1)是在第一人称视角中使用穿戴外骨骼的虚拟化身进行的。受试者使用运动想象来激活和维持四个互斥的运动状态:左手腕或右手腕的旋转或左手或右手的运动。(D) 二维连续BCI实验(范式2)控制计算机屏幕上的二维手形光标,受试者使用运动想象来控制光标在中心-外任务中的速度和方向。
通过对ECoG信号进行时频分解,从左右侧感觉运动皮层提取神经特征,涵盖10到150 Hz的15个频带。使用这些提取的神经特征,结合N阶部分最小二乘法(NPLS),研究团队训练了cMTP解码器。在两种BCI范式中,cMTP解码器的输出与控制解码器的输出结合,以创建训练数据。随后,通过递归指数加权NPLS增量自适应算法,在模拟的实时环境中对BCI的控制解码器进行训练。
为评估该方法的效率,研究团队采用aaBCI框架(基于cMTP解码器输出的估算标签)训练的控制解码器,与基于监督学习(使用真实标签)训练的解码器进行比较。此外,还进行了伪在线模拟,使用cMTP解码器的输出随机化处理(chance level),以评估其与自适应BCI的性能差异。

结果
检测感觉运动皮层中的cMTP神经相关性
首先,研究员评估了cMTP解码器在识别BCI控制命令准确性方面的能力,分别针对不同运动BCI范式进行了分析。通过五折交叉验证计算出cMTP解码器的ROC曲线下面积(AUC),结果显示:对于多类离散BCI(范式1),AUC为0.5677 ± 0.0427;对于二维连续BCI(范式2),AUC为0.6479 ± 0.0202。
使用cMTP输出估算控制解码器的更新标签
之后,研究人员采用了一种策略,仅将高置信度判定为正确或错误的样本与控制解码器输出结合,来估算用于更新控制解码器的标签。这一策略显著提升了cMTP解码器在训练数据集中的表现。在aaBCI的模拟在线环境中,BCI范式1中,cMTP解码器以70.5% ± 8.1%的准确率解码样本的正确性;BCI范式2中,准确率为71.5% ± 7.4%。在BCI范式1中,估算的控制解码器标签整体准确率为64.5%;在BCI范式2中,当估算标签与真实标签的角度小于60°时,其准确率为63.3%。见图3A-B.
aaBCI在线使用的模拟评估
在线模拟过程中,研究人员评估了aaBCI框架对控制解码器进行自适应训练的效果。结果发现,训练方法(监督学习、aaBCI自适应、随机cMTP自适应)对两个BCI范式的控制解码器解码能力影响显著。监督学习训练的解码器表现显著优于随机cMTP自适应。更有趣的是,使用aaBCI训练的控制解码器也显著优于随机cMTP自适应。然而,与监督学习相比,aaBCI训练的解码器表现略逊一筹,这种差异在多分类BCI中具有统计显著性,但在连续BCI中不显著。见图3C-D.
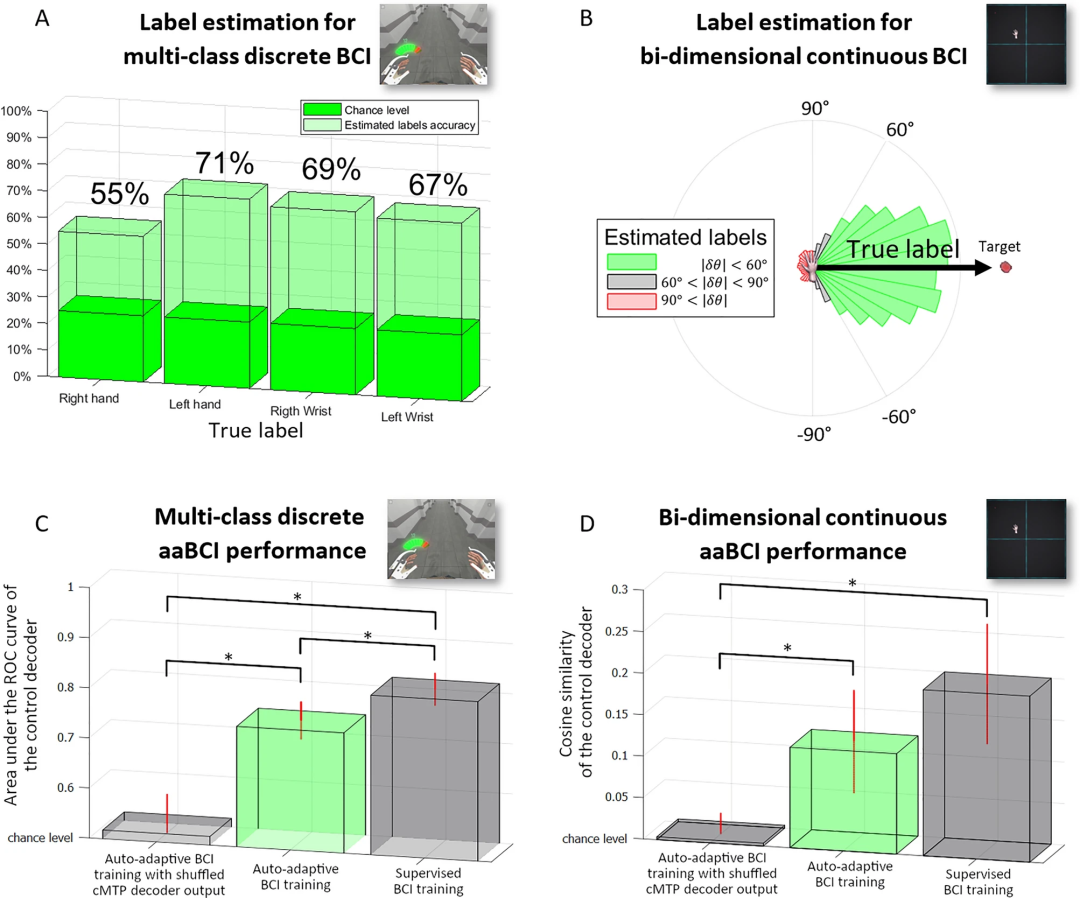
Fig3. (A,B) 用于训练 aaBCI 控制解码器的数据集中估计标签的准确性。(A) 多分类离散BCI中每个运动类别的标签正确估算的百分比。(B) aaBCI估算的控制标签与实际标签之间的角度。(C,D) 根据训练方法比较控制解码器的性能。(C) 在BCI范式一中,使用AUC来评估性能。(D) 在BCI范式二中,使用解码和最佳光标轨迹之间的余弦相似性来评估性能。

讨论
此研究成功检测了感觉运动皮层中ECoG数据的cMTP神经相关性,进一步支持了运动任务表现与该脑区神经活动之间的关联。研究团队首次在BCI用户控制两个不同执行器的过程中,从感觉运动皮层中提取了与实时BCI执行器控制表现相关的连续信号。
研究结果验证了aaBCI框架在离散(基于分类)和连续控制BCI的应用潜力。尽管aaBCI训练的控制解码器表现略逊于完全监督训练的解码器,但由于cMTP解码器的准确性尚未达到完美,这一差距在预期之中。尽管aaBCI框架并非完全无监督系统,但其在自由使用期间自动生成标签的能力,为BCI系统的长期自适应使用提供了新的可能。未来的研究应进一步优化cMTP解码器的特征提取和标记策略,并探索更复杂和接近实际应用的BCI范式。
值得注意的是,研究采用了在线模拟证明了aaBCI在实际在线实验中的可行性。未来有望将这一框架应用于四肢瘫痪患者的临床试验,并探索其在日常环境中长期使用的潜力。这一突破为日常生活中开发长期使用的BCI系统奠定了基础,反过来也将进一步推动aaBCI的广泛应用。
Reference:
https://www.nature.com/articles/s41598-022-25049-w
仅用于学术分享,若侵权请留言,即时删侵!
加入社群
欢迎加入脑机接口社区交流群,
探讨脑机接口领域话题,实时跟踪脑机接口前沿。
加微信群:
添加微信:RoseBCI【备注:姓名+行业/专业】。
加QQ群:913607986
欢迎来稿
1.欢迎来稿。投稿咨询,请联系微信:RoseBCI
点击投稿:脑机接口社区学术新闻投稿指南
2.加入社区成为兼职创作者,请联系微信:RoseBCI


一键三连「分享」、「点赞」和「在看」
不错过每一条脑机前沿进展















 246
246

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









