







CART分类与回归树与GBDT(Gradient Boost Decision Tree)
一、CART分类与回归树
资料转载:
http://dataunion.org/5771.html
Classification And Regression Tree(CART)是决策树的一种,并且是非常重要的决策树,属于Top Ten Machine Learning Algorithm。顾名思义,CART算法既可以用于创建分类树(Classification Tree),也可以用于创建回归树(Regression Tree)、模型树(Model Tree),两者在建树的过程稍有差异。CART是二叉树。
1、CART作为分类树
CART作为分类树时,特征属性可以是连续类型也可以是离散类型,但观察属性(即标签属性或者分类属性)必须是离散类型。CART分类树在节点分裂时使用GINI指数,GINI指数是度量数据划分或训练数据集D的不纯度为主。GINI值越小,表明样本的纯净度越高(即该样本只属于同一类的概率越高)。衡量出数据集某个特征所有取值的Gini指数后,就可以得到该特征的Gini Split info,也就是GiniGain。不考虑剪枝情况下,分类决策树递归创建过程中就是每次选择GiniGain最小的节点做分叉点,直至子数据集都属于同一类或者所有特征用光了。
对于离散属性,可能会出现属性取值数N>=3的情况,因为CART是二叉树,此时需要考虑将N>=3个取值的离散特征的处理时也只能有两个分支,这就要通过组合人为的创建二取值序列并取GiniGain最小者作为树分叉决策点。如某特征值具有[‘young’,’middle’,’old’]三个取值,那么二分序列会有如下3种可能性:
[((‘young’,), (‘middle’, ‘old’)), ((‘middle’,), (‘young’, ‘old’)), ((‘old’,), (‘young’, ‘middle’))]。 采用CART算法,就需要分别计算按照上述List中的二分序列做分叉时的Gini指数,然后选取产生最小的GINIGain的二分序列做该特征的分叉二值序列参与树构建的递归。因此,CART不适用于离散特征有多个取值的场景。
对于连续属性的处理,类似于C4.5,区别在于CART算法中要以GiniGain最小作为分界点选取标准。是否需要修正?处理过程为:
先把连续属性转换为离散属性再进行处理。虽然本质上属性的取值是连续的,但对于有限的采样数据它是离散的,如果有N条样本,那么我们有N-1种离散化的方法:<=vj的分到左子树,>vj的分到右子树。计算这N-1种情况下最大的信息增益率。另外,对于连续属性先进行排序(升序),只有在决策属性(即分类发生了变化)发生改变的地方才需要切开,这可以显著减少运算量。
(1) 对特征的取值进行升序排序
(2) 两个特征取值之间的中点作为可能的分裂点,将数据集分成两部分,计算每个可能的分裂点的GiniGain。优化算法就是只计算分类属性发生改变的那些特征取值
(3)选择GiniGain最小的分裂点作为该特征的最佳分裂点(注意,若修正则此处需对最佳分裂点的Gini Gain减去log2(N-1)/|D|(N是连续特征的取值个数,D是训练数据数目)
必须注意的是:根据离散特征分支划分数据集时,子数据集中不再包含该特征(因为每个分支下的子数据集该特征的取值就会是一样的,信息增益或者Gini Gain将不再变化,这也是C4.5等决策树离散型特征不会被重复选择为节点分裂的属性);而根据连续特征分支时,各分支下的子数据集必须依旧包含该特征(当然,左右分支各包含的分别是取值小于、大于等于分裂值的子数据集),因为该连续特征再接下来的树分支过程中可能依旧起着决定性作用。
2、CART作为回归树
当数据拥有众多特征并且特征之间关系十分复杂时,构建全局模型的想法就显得太难了,也略显笨拙。而且,实际生活中很多问题都是非线性的,不可能使用全局线性模型来拟合任何数据。一种可行的方法是将数据集切分成很多份易建模的数据,然后利用线性回归技术来建模。如果首次切分后仍然难以拟合线性模型就继续切分。在这种切分方式下,树结构和回归法就相当有用。
回归树要求观察属性是连续类型,由于节点分裂选择特征属性时通常使用最小绝对偏差(LAD)或者最小二乘偏差(LSD)法,因此通常特征属性也是连续类型。
以最小绝对偏差(LAD)为例
(1)先令最佳方差为无限大bestVar=inf。
(2)依次计算根据某特征(FeatureCount次迭代)划分数据后的总方差currentVar(,计算方法为:划分后左右子数据集的总方差之和),如果currentVar
(3)返回最佳分支特征、分支特征值(离散特征则为二分序列、连续特征则为分裂点的值),左右分支子数据集。
3、CART作为模型树
用树来对数据建模,除了把叶节点简单地设定为常数值之外,还有一种方法是把叶节点设定为分段线性函数,这里所谓的分段线性(piecewise linear)是指模型由多个线性片段组成,这就是模型树。模型树的可解释性是它优于回归树的特点之一。另外,模型树也具有更髙的预测准确度。
模型树的创建过程大体上与回归树是一样的,区别就在于递归过程中最佳分支特征选取时差值的计算。对于模型树:给定的数据集先用线性的模型来对它进行拟合,然后计算真实的目标值与模型预测值间的差值,将这些差值的平方求和就得到了所需的总差值,最后依然选取总差值最小的特征做分支特征。至于线性回归采用哪种解法,就要参看线性回归模型的求解了。
在网上看到一篇对从代码层面理解gbdt比较好的文章,转载记录一下:
GBDT(Gradient Boosting Decision Tree) 又叫 MART(Multiple Additive
Regression
Tree),是一种迭代的决策树算法,该算法由多棵决策树组成,所有树的结论累加起来做最终答案。它在被提出之初就和SVM一起被认为是泛化能力(generalization)较强的算法。近些年更因为被用于搜索排序的机器学习模型而引起大家关注。
后记:发现GBDT除了我描述的残差版本外还有另一种GBDT描述,两者大概相同,但求解方法(Gradient应用)不同。其区别和另一版本的介绍链接见这里。由于另一版本介绍博客中亦有不少错误,建议大家还是先看本篇,再跳到另一版本描述,这个顺序当能两版本都看懂。
第1~4节:GBDT算法内部究竟是如何工作的?
第5节:它可以用于解决哪些问题?
第6节:它又是怎样应用于搜索排序的呢?
在此先给出我比较推荐的两篇英文文献,喜欢英文原版的同学可直接阅读:
【1】Boosting Decision Tree入门教程 http://www.schonlau.net/publication/05stata_boosting.pdf
【2】LambdaMART用于搜索排序入门教程 http://research.microsoft.com/pubs/132652/MSR-TR-2010-82.pdf
GBDT主要由三个概念组成:Regression Decistion Tree(即DT),Gradient Boosting(即GB),Shrinkage (算法的一个重要演进分枝,目前大部分源码都按该版本实现)。搞定这三个概念后就能明白GBDT是如何工作的,要继续理解它如何用于搜索排序则需要额外理解RankNet概念,之后便功德圆满。下文将逐个碎片介绍,最终把整张图拼出来。
一、 DT:回归树 Regression Decision Tree
提起决策树(DT, Decision Tree) 绝大部分人首先想到的就是C4.5分类决策树。但如果一开始就把GBDT中的树想成分类树,那就是一条歪路走到黑,一路各种坑,最终摔得都要咯血了还是一头雾水说的就是LZ自己啊有木有。咳嗯,所以说千万不要以为GBDT是很多棵分类树。决策树分为两大类,回归树和分类树。前者用于预测实数值,如明天的温度、用户的年龄、网页的相关程度;后者用于分类标签值,如晴天/阴天/雾/雨、用户性别、网页是否是垃圾页面。这里要强调的是,前者的结果加减是有意义的,如10岁+5岁-3岁=12岁,后者则无意义,如男+男+女=到底是男是女? GBDT的核心在于累加所有树的结果作为最终结果,就像前面对年龄的累加(-3是加负3),而分类树的结果显然是没办法累加的,所以GBDT中的树都是回归树,不是分类树,这点对理解GBDT相当重要(尽管GBDT调整后也可用于分类但不代表GBDT的树是分类树)。那么回归树是如何工作的呢?
下面我们以对人的性别判别/年龄预测为例来说明,每个instance都是一个我们已知性别/年龄的人,而feature则包括这个人上网的时长、上网的时段、网购所花的金额等。
作为对比,先说分类树,我们知道C4.5分类树在每次分枝时,是穷举每一个feature的每一个阈值,找到使得按照feature<=阈值,和feature>阈值分成的两个分枝的熵最大的feature和阈值(熵最大的概念可理解成尽可能每个分枝的男女比例都远离1:1),按照该标准分枝得到两个新节点,用同样方法继续分枝直到所有人都被分入性别唯一的叶子节点,或达到预设的终止条件,若最终叶子节点中的性别不唯一,则以多数人的性别作为该叶子节点的性别。
回归树总体流程也是类似,不过在每个节点(不一定是叶子节点)都会得一个预测值,以年龄为例,该预测值等于属于这个节点的所有人年龄的平均值。分枝时穷举每一个feature的每个阈值找最好的分割点,但衡量最好的标准不再是最大熵,而是最小化均方差–即(每个人的年龄-预测年龄)^2 的总和 / N,或者说是每个人的预测误差平方和 除以 N。这很好理解,被预测出错的人数越多,错的越离谱,均方差就越大,通过最小化均方差能够找到最靠谱的分枝依据。分枝直到每个叶子节点上人的年龄都唯一(这太难了)或者达到预设的终止条件(如叶子个数上限),若最终叶子节点上人的年龄不唯一,则以该节点上所有人的平均年龄做为该叶子节点的预测年龄。若还不明白可以Google “Regression Tree”,或阅读本文的第一篇论文中Regression Tree部分。
二、 GB:梯度迭代 Gradient Boosting
好吧,我起了一个很大的标题,但事实上我并不想多讲Gradient Boosting的原理,因为不明白原理并无碍于理解GBDT中的Gradient Boosting。喜欢打破砂锅问到底的同学可以阅读这篇英文wikihttp://en.wikipedia.org/wiki/Gradient_boosted_trees#Gradient_tree_boosting
Boosting,迭代,即通过迭代多棵树来共同决策。这怎么实现呢?难道是每棵树独立训练一遍,比如A这个人,第一棵树认为是10岁,第二棵树认为是0岁,第三棵树认为是20岁,我们就取平均值10岁做最终结论?–当然不是!且不说这是投票方法并不是GBDT,只要训练集不变,独立训练三次的三棵树必定完全相同,这样做完全没有意义。之前说过,GBDT是把所有树的结论累加起来做最终结论的,所以可以想到每棵树的结论并不是年龄本身,而是年龄的一个累加量。GBDT的核心就在于,每一棵树学的是之前所有树结论和的残差,这个残差就是一个加预测值后能得真实值的累加量。比如A的真实年龄是18岁,但第一棵树的预测年龄是12岁,差了6岁,即残差为6岁。那么在第二棵树里我们把A的年龄设为6岁去学习,如果第二棵树真的能把A分到6岁的叶子节点,那累加两棵树的结论就是A的真实年龄;如果第二棵树的结论是5岁,则A仍然存在1岁的残差,第三棵树里A的年龄就变成1岁,继续学。这就是Gradient Boosting在GBDT中的意义,简单吧。
三、 GBDT工作过程实例。
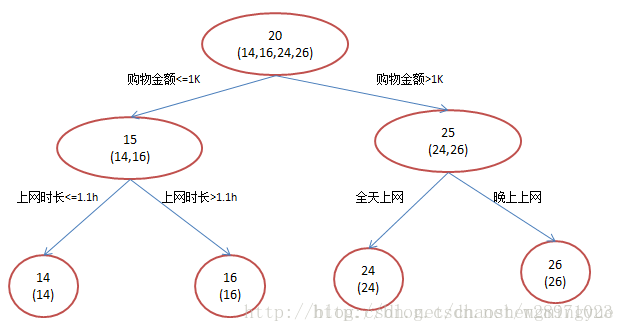
还是年龄预测,简单起见训练集只有4个人,A,B,C,D,他们的年龄分别是14,16,24,26。其中A、B分别是高一和高三学生;C,D分别是应届毕业生和工作两年的员工。如果是用一棵传统的回归决策树来训练,会得到如下图1所示结果:
现在我们使用GBDT来做这件事,由于数据太少,我们限定叶子节点做多有两个,即每棵树都只有一个分枝,并且限定只学两棵树。我们会得到如下图2所示结果:
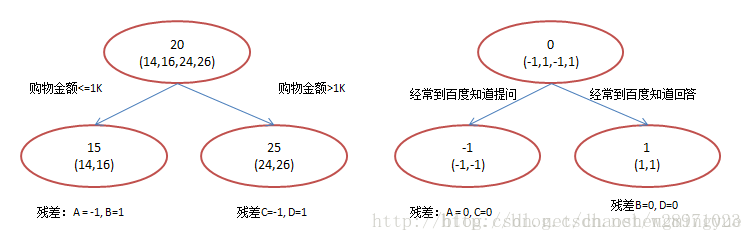
在第一棵树分枝和图1一样,由于A,B年龄较为相近,C,D年龄较为相近,他们被分为两拨,每拨用平均年龄作为预测值。此时计算残差(残差的意思就是: A的预测值 + A的残差 = A的实际值),所以A的残差就是16-15=1(注意,A的预测值是指前面所有树累加的和,这里前面只有一棵树所以直接是15,如果还有树则需要都累加起来作为A的预测值)。进而得到A,B,C,D的残差分别为-1,1,-1,1。然后我们拿残差替代A,B,C,D的原值,到第二棵树去学习,如果我们的预测值和它们的残差相等,则只需把第二棵树的结论累加到第一棵树上就能得到真实年龄了。这里的数据显然是我可以做的,第二棵树只有两个值1和-1,直接分成两个节点。此时所有人的残差都是0,即每个人都得到了真实的预测值。
换句话说,现在A,B,C,D的预测值都和真实年龄一致了。Perfect!:
A: 14岁高一学生,购物较少,经常问学长问题;预测年龄A = 15 – 1 = 14
B: 16岁高三学生;购物较少,经常被学弟问问题;预测年龄B = 15 + 1 = 16
C: 24岁应届毕业生;购物较多,经常问师兄问题;预测年龄C = 25 – 1 = 24
D: 26岁工作两年员工;购物较多,经常被师弟问问题;预测年龄D = 25 + 1 = 26
那么哪里体现了Gradient呢?其实回到第一棵树结束时想一想,无论此时的cost function是什么,是均方差还是均差,只要它以误差作为衡量标准,残差向量(-1, 1, -1, 1)都是它的全局最优方向,这就是Gradient。
讲到这里我们已经把GBDT最核心的概念、运算过程讲完了!没错就是这么简单。不过讲到这里很容易发现三个问题:
1)既然图1和图2 最终效果相同,为何还需要GBDT呢?
答案是过拟合。过拟合是指为了让训练集精度更高,学到了很多”仅在训练集上成立的规律“,导致换一个数据集当前规律就不适用了。其实只要允许一棵树的叶子节点足够多,训练集总是能训练到100%准确率的(大不了最后一个叶子上只有一个instance)。在训练精度和实际精度(或测试精度)之间,后者才是我们想要真正得到的。
我们发现图1为了达到100%精度使用了3个feature(上网时长、时段、网购金额),其中分枝“上网时长>1.1h” 很显然已经过拟合了,这个数据集上A,B也许恰好A每天上网1.09h, B上网1.05小时,但用上网时间是不是>1.1小时来判断所有人的年龄很显然是有悖常识的;
相对来说图2的boosting虽然用了两棵树 ,但其实只用了2个feature就搞定了,后一个feature是问答比例,显然图2的依据更靠谱。(当然,这里是LZ故意做的数据,所以才能靠谱得如此狗血。实际中靠谱不靠谱总是相对的) Boosting的最大好处在于,每一步的残差计算其实变相地增大了分错instance的权重,而已经分对的instance则都趋向于0。这样后面的树就能越来越专注那些前面被分错的instance。就像我们做互联网,总是先解决60%用户的需求凑合着,再解决35%用户的需求,最后才关注那5%人的需求,这样就能逐渐把产品做好,因为不同类型用户需求可能完全不同,需要分别独立分析。如果反过来做,或者刚上来就一定要做到尽善尽美,往往最终会竹篮打水一场空。
2)Gradient呢?不是“G”BDT么?
到目前为止,我们的确没有用到求导的Gradient。在当前版本GBDT描述中,的确没有用到Gradient,该版本用残差作为全局最优的绝对方向,并不需要Gradient求解.
3)这不是boosting吧?Adaboost可不是这么定义的。
这是boosting,但不是Adaboost。GBDT不是Adaboost Decistion Tree。就像提到决策树大家会想起C4.5,提到boost多数人也会想到Adaboost。Adaboost是另一种boost方法,它按分类对错,分配不同的weight,计算cost function时使用这些weight,从而让“错分的样本权重越来越大,使它们更被重视”。Bootstrap也有类似思想,它在每一步迭代时不改变模型本身,也不计算残差,而是从N个instance训练集中按一定概率重新抽取N个instance出来(单个instance可以被重复sample),对着这N个新的instance再训练一轮。由于数据集变了迭代模型训练结果也不一样,而一个instance被前面分错的越厉害,它的概率就被设的越高,这样就能同样达到逐步关注被分错的instance,逐步完善的效果。Adaboost的方法被实践证明是一种很好的防止过拟合的方法,但至于为什么则至今没从理论上被证明。GBDT也可以在使用残差的同时引入Bootstrap re-sampling,GBDT多数实现版本中也增加的这个选项,但是否一定使用则有不同看法。re-sampling一个缺点是它的随机性,即同样的数据集合训练两遍结果是不一样的,也就是模型不可稳定复现,这对评估是很大挑战,比如很难说一个模型变好是因为你选用了更好的feature,还是由于这次sample的随机因素。
四、Shrinkage
Shrinkage(缩减)的思想认为,每次走一小步逐渐逼近结果的效果,要比每次迈一大步很快逼近结果的方式更容易避免过拟合。即它不完全信任每一个棵残差树,它认为每棵树只学到了真理的一小部分,累加的时候只累加一小部分,通过多学几棵树弥补不足。用方程来看更清晰,即
没用Shrinkage时:(yi表示第i棵树上y的预测值, y(1~i)表示前i棵树y的综合预测值)
y(i+1) = 残差(y1~yi), 其中: 残差(y1~yi) = y真实值 - y(1 ~ i)
y(1 ~ i) = SUM(y1, …, yi)
Shrinkage不改变第一个方程,只把第二个方程改为:
y(1 ~ i) = y(1 ~ i-1) + step * yi
即Shrinkage仍然以残差作为学习目标,但对于残差学习出来的结果,只累加一小部分(step*残差)逐步逼近目标,step一般都比较小,如0.01~0.001(注意该step非gradient的step),导致各个树的残差是渐变的而不是陡变的。直觉上这也很好理解,不像直接用残差一步修复误差,而是只修复一点点,其实就是把大步切成了很多小步。本质上,Shrinkage为每棵树设置了一个weight,累加时要乘以这个weight,但和Gradient并没有关系。这个weight就是step。就像Adaboost一样,Shrinkage能减少过拟合发生也是经验证明的,目前还没有看到从理论的证明。
五、 GBDT的适用范围
该版本GBDT几乎可用于所有回归问题(线性/非线性),相对logistic regression仅能用于线性回归,GBDT的适用面非常广。亦可用于二分类问题(设定阈值,大于阈值为正例,反之为负例)。
六、 搜索引擎排序应用 RankNet
搜索排序关注各个doc的顺序而不是绝对值,所以需要一个新的cost function,而RankNet基本就是在定义这个cost function,它可以兼容不同的算法(GBDT、神经网络…)。
实际的搜索排序使用的是LambdaMART算法,必须指出的是由于这里要使用排序需要的cost function,LambdaMART迭代用的并不是残差。Lambda在这里充当替代残差的计算方法,它使用了一种类似Gradient*步长模拟残差的方法。这里的MART在求解方法上和之前说的残差略有不同,其区别描述见这里。
就像所有的机器学习一样,搜索排序的学习也需要训练集,这里一般是用人工标注实现,即对每一个(query,doc) pair给定一个分值(如1,2,3,4),分值越高表示越相关,越应该排到前面。然而这些绝对的分值本身意义不大,例如你很难说1分和2分文档的相关程度差异是1分和3分文档差距的一半。相关度本身就是一个很主观的评判,标注人员无法做到这种定量标注,这种标准也无法制定。但标注人员很容易做到的是”AB都不错,但文档A比文档B更相关,所以A是4分,B是3分“。RankNet就是基于此制定了一个学习误差衡量方法,即cost function。具体而言,RankNet对任意两个文档A,B,通过它们的人工标注分差,用sigmoid函数估计两者顺序和逆序的概率P1。然后同理用机器学习到的分差计算概率P2(sigmoid的好处在于它允许机器学习得到的分值是任意实数值,只要它们的分差和标准分的分差一致,P2就趋近于P1)。这时利用P1和P2求的两者的交叉熵,该交叉熵就是cost function。它越低说明机器学得的当前排序越趋近于标注排序。为了体现NDCG的作用(NDCG是搜索排序业界最常用的评判标准),RankNet还在cost function中乘以了NDCG。
好,现在我们有了cost function,而且它是和各个文档的当前分值yi相关的,那么虽然我们不知道它的全局最优方向,但可以求导求Gradient,Gradient即每个文档得分的一个下降方向组成的N维向量,N为文档个数(应该说是query-doc pair个数)。这里仅仅是把”求残差“的逻辑替换为”求梯度“,可以这样想:梯度方向为每一步最优方向,累加的步数多了,总能走到局部最优点,若该点恰好为全局最优点,那和用残差的效果是一样的。这时套到之前讲的逻辑,GDBT就已经可以上了。那么最终排序怎么产生呢?很简单,每个样本通过Shrinkage累加都会得到一个最终得分,直接按分数从大到小排序就可以了(因为机器学习产生的是实数域的预测分,极少会出现在人工标注中常见的两文档分数相等的情况,几乎不同考虑同分文档的排序方式)
另外,如果feature个数太多,每一棵回归树都要耗费大量时间,这时每个分支时可以随机抽一部分feature来遍历求最优(ELF源码实现方式)。















 3702
3702

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









