







✅博主简介:本人擅长数据处理、建模仿真、论文写作与指导,科研项目与课题交流。项目合作可私信或扫描文章底部二维码。
- 问题背景与重要性:航线网络是航空公司运营的基础,点对点直达式运营模式存在诸多问题,如旅客上座率低、运输时间长等。通过增加中转环节并建立多目标优化模型,结合智能优化算法来提高路径规划求解效率具有重要意义。
- 基于改进遗传算法的模型:
- 模型构建要素:将飞机机型配置、运输时间和系统运营成本相结合构建模型。考虑中转城市的位置、非中转城市节点向中转城市节点的分配、流量分配、机队的飞行时间以及机队规模等因素建立决策模型。以飞行时间与系统总成本作为最小化求解目标,这意味着要在保证运输效率的同时降低运营成本。
- 算法改进措施:利用熵值法建立染色体选择机制,熵值法可以更科学地衡量染色体的优劣,使得选择出的染色体更有可能包含优秀的基因组合。引入自适应交叉率对遗传算法进行改进,自适应交叉率可以根据种群的进化情况动态调整,在算法前期保持较高的交叉率以增加种群多样性,后期降低交叉率以加快收敛速度。
- 优化求解效果:通过实验验证,将不同机型的配置及其运输时间进行融合的效果优于单一成本航线路径规划。与群智能优化算法对比,改进遗传算法在计算性能上更优,如计算时间更短、结果更准确等。对航线网络中转城市节点的选择更加合理,能显著降低航班中转模型的运输成本与运输时间的加权值,为航空公司在机队资源配置和航线规划方面提供了更好的决策依据。
- 基于改进多目标粒子群算法的模型:
- 模型构建背景:针对复杂天气状况下航班路径需要二次优化的情况提出该模型。首先利用随机森林算法对航班状况进行预测,计算航班延误时间。因为天气情况对航班运行影响较大,准确预测延误时间有助于后续合理规划航班路径和提高旅客时间满意度。通过延误时间建立旅客时间满意度模型,然后结合时间成本模型建立航班路径多目标优化模型,综合考虑了时间和成本两个重要因素。
- 算法改进与优势:通过改进粒子适应度值的惯性权重来提高粒子群优化算法的局部搜索能力和全局搜索能力。局部搜索能力的提升可以使算法在搜索空间中更精细地寻找最优解,全局搜索能力的增强则有助于避免算法陷入局部最优解。实验表明,随机森林算法模型对短时小样本天气数据的预测准确率达到 98.6%,为航班延误决策提供了稳定的数据基础。与未改进的粒子群等算法相比,所提方法的时间复杂度较低,能够在更短的时间内找到较优的航班路径,同时有效提高了旅客对航班中转方案的满意度,提升了航空公司的服务质量。
(2)航班中转模型求解算法研究
- 改进遗传算法求解过程:
- 初始化种群:根据模型的决策变量和约束条件,随机生成一定数量的初始航班路径方案作为种群。这些初始方案代表了不同的中转城市选择、流量分配等情况。
- 计算适应度:对于每个个体(航班路径方案),根据建立的多目标优化模型,计算其适应度值。适应度值反映了该方案在飞行时间和系统总成本方面的综合表现,值越小表示方案越优。
- 选择操作:基于熵值法建立的染色体选择机制,从当前种群中选择适应度较好的个体作为父代,用于后续的交叉和变异操作。这样可以保证优秀的基因在种群中得以传承。
- 交叉操作:采用自适应交叉率进行交叉操作,将父代个体的部分基因进行交换,生成新的子代个体。交叉操作可以产生新的航班路径方案,增加种群的多样性。
- 变异操作:对部分子代个体进行变异操作,随机改变其某些基因的值,以进一步探索搜索空间,避免算法陷入局部最优。
- 迭代更新:重复上述步骤,不断更新种群,直到满足终止条件,如达到最大迭代次数或找到满足一定精度要求的最优解。
- 改进多目标粒子群算法求解过程:
- 初始化粒子群:随机生成一组粒子,每个粒子代表一个航班路径方案,包括中转城市的选择、飞行顺序等信息。同时初始化粒子的速度和位置。
- 计算适应度:根据航班路径多目标优化模型,计算每个粒子的适应度值,考虑时间成本和旅客时间满意度等因素。
- 更新速度和位置:根据粒子的当前位置、速度以及个体最优位置和全局最优位置,通过一定的公式更新粒子的速度和位置。其中,改进的惯性权重在更新过程中起到调节作用,使粒子在搜索过程中更好地平衡全局搜索和局部搜索。
- 更新个体最优和全局最优:比较每个粒子的当前适应度值与个体历史最优适应度值,如果当前值更优,则更新个体最优位置。同时,在整个粒子群中比较所有粒子的个体最优位置,找到全局最优位置。
- 迭代优化:不断重复上述步骤,直到满足终止条件,如达到预设的迭代次数或适应度值不再有明显改善,得到最优的航班路径规划方案。
(3)实验与结果分析
- 实验设计:
- 针对基于改进遗传算法的模型,设计不同的实验场景,包括不同规模的航线网络、不同机型配置和运输时间组合等。通过改变这些因素,观察模型在不同情况下的性能表现,如运输成本、运输时间的变化以及中转城市节点选择的合理性。
- 对于基于改进多目标粒子群算法的模型,设置不同的复杂天气状况和航班延误情况,以测试模型在应对这些不确定性因素时的有效性。同时,对比不同算法在相同实验条件下的结果,包括未改进的粒子群算法、其他传统优化算法等。
- 结果分析:
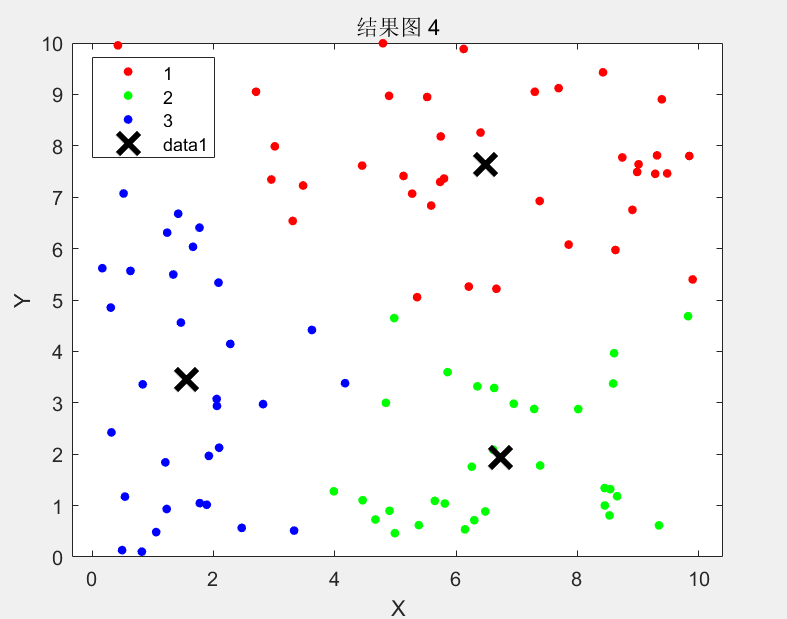
- 改进遗传算法结果分析:通过与群智能优化算法等对比,分析改进遗传算法在计算性能、成本降低、时间优化以及中转城市节点选择等方面的优势。展示运输成本与运输时间的加权值在不同实验场景下的变化情况,说明模型的有效性和优越性。
- 改进多目标粒子群算法结果分析:重点分析在复杂天气状况下,模型对航班延误时间的预测准确性以及对航班路径二次优化的效果。通过与未改进算法对比,体现所提方法在时间复杂度降低和旅客满意度提高方面的优势。展示不同算法在相同实验条件下得到的最优路径方案以及对应的时间成本和旅客满意度指标,进行详细的对比分析。
-
% 定义问题参数 num_cities = 10; % 城市数量 num_aircraft_types = 3; % 飞机机型数量 flight_times = rand(num_cities, num_cities); % 随机生成飞行时间矩阵 costs_per_aircraft_type = rand(num_aircraft_types, 1); % 每种机型的单位成本 population_size = 50; % 种群大小 max_generations = 100; % 最大迭代次数 % 初始化种群 population = initializePopulation(population_size, num_cities, num_aircraft_types); % 迭代求解 for generation = 1:max_generations % 计算适应度 fitness_values = calculateFitness(population, flight_times, costs_per_aircraft_type); % 选择操作 selected_population = selection(population, fitness_values); % 交叉操作 crossed_population = crossover(selected_population); % 变异操作 mutated_population = mutation(crossed_population); % 更新种群 population = mutated_population; end % 输出结果 best_solution = findBestSolution(population, fitness_values); disp(['最优航班路径方案:', num2str(best_solution)]); disp(['最小总成本:', num2str(fitness_values(best_solution))]); % 函数定义 function population = initializePopulation(population_size, num_cities, num_aircraft_types) % 随机生成初始种群,每个个体表示一个航班路径方案和机型选择 population = zeros(population_size, num_cities + num_aircraft_types); for i = 1:population_size % 随机生成城市访问顺序 cities_order = randperm(num_cities); population(i, 1:num_cities) = cities_order; % 随机选择机型 aircraft_types = randi(num_aircraft_types, 1, num_cities); population(i, num_cities + 1:end) = aircraft_types; end end function fitness_values = calculateFitness(population, flight_times, costs_per_aircraft_type) % 计算适应度值,这里假设适应度为总成本和总飞行时间的加权和 num_individuals = size(population, 1); fitness_values = zeros(num_individuals, 1); for i = 1:num_individuals route = population(i, 1:num_cities); aircraft_types = population(i, num_cities + 1:end); total_cost = 0; total_time = 0; for j = 1:(num_cities - 1) from_city = route(j); to_city = route(j + 1); aircraft_type = aircraft_types(j); flight_time = flight_times(from_city, to_city); cost = costs_per_aircraft_type(aircraft_type) * flight_time; total_cost = total_cost + cost; total_time = total_time + flight_time; end fitness_values(i) = total_cost + total_time; % 可以根据实际需求调整权重 end end function selected_population = selection(population, fitness_values) % 基于熵值法的选择操作 % 这里简单假设根据适应度值排序选择前一半个体作为父代 [~, sorted_indices] = sort(fitness_values); selected_population = population(sorted_indices(1:population_size / 2), :); end function crossed_population = crossover(selected_population) % 自适应交叉率的交叉操作 crossover_rate = 0.8; % 初始交叉率 num_selected = size(selected_population, 1); crossed_population = zeros(num_selected, size(selected_population, 2)); for i = 1:2:num_selected if rand < crossover_rate % 随机选择交叉点 crossover_point = randi(size(selected_population, 2) - 1); parent1 = selected_population(i, :); parent2 = selected_population(i + 1, :); child1 = [parent1(1:crossover_point), parent2(crossover_point + 1:end)]; child2 = [parent2(1:crossover_point), parent1(crossover_point + 1:end)]; crossed_population(i, :) = child1; crossed_population(i + 1, :) = child2; else crossed_population(i, :) = parent1; crossed_population(i + 1, :) = parent2; end crossover_rate = crossover_rate * 0.99; % 自适应降低交叉率 end end function mutated_population = mutation(crossed_population) % 变异操作 mutation_rate = 0.1; % 变异率 num_crossed = size(crossed_population, 1); mutated_population = crossed_population; for i = 1:num_crossed if rand < mutation_rate % 随机选择变异位置 mutation_point = randi(size(crossed_population, 2)); if mutation_point <= num_cities % 城市访问顺序变异 mutated_population(i, mutation_point) = randi(num_cities); else % 机型选择变异 mutated_population(i, mutation_point) = randi(num_aircraft_types); end end end end function best_solution = findBestSolution(population, fitness_values) % 找到最优解 [min_fitness, best_index] = min(fitness_values); best_solution = population(best_index, :); end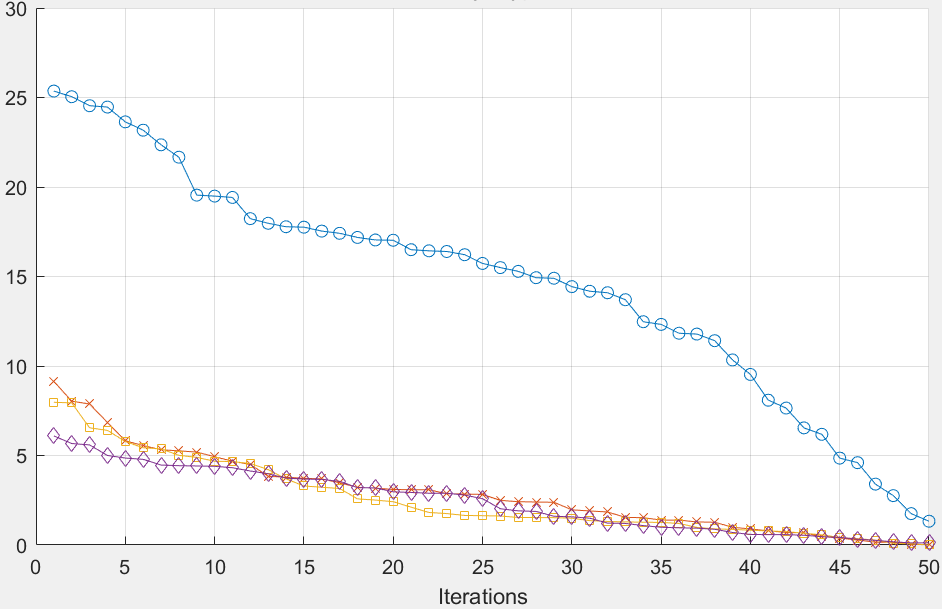



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











