







✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1) 无信号交叉口交通流特性分析
随着车路协同与无人驾驶技术的发展,交叉口控制逐渐转向智能化和自动化的方向。在无信号交叉口中,传统的信号灯控制系统被省略,智能网联车辆通过车辆之间的实时通信和协作来提高通行效率和减少交通拥堵。本文首先对无信号交叉口交通流的特性进行了深入分析,主要基于冲突理论和路权理论等经典交叉口控制理论。针对智能网联车辆在无信号交叉口的运行特点,本文研究了车流冲突、路权分配和车辆决策行为等交通流特性。
在无信号交叉口中,车辆的通行顺序取决于路权的动态分配,路权分配是基于车辆之间的沟通和协作而决定的。本文通过构建交叉口通行规则库,定义了各类车辆在交叉口的行为规则和冲突解决策略。例如,当两辆车同时到达交叉口时,通过基于路权优先级的分配方法,明确哪辆车应优先通行,哪辆车需要等待。这些规则不仅考虑了车辆的到达时间和速度,还结合了车流密度和冲突点分布,以尽量减少车流冲突的发生,提高通行的安全性和效率。同时,本文提出了一种基于冲突检测的车辆控制方法,通过提前识别潜在的冲突点,使车辆能够及时调整速度和路线,从而避免事故发生。这种方法有效降低了交叉口处的交通事故风险,显著改善了交叉口的通行能力。
(2) 元胞自动机模型在无信号交叉口交通流中的应用
智能网联环境下,无信号交叉口的交通流建模变得更加复杂。本文基于元胞自动机模型,构建了适用于智能网联环境下无信号交叉口的交通流动态仿真模型。元胞自动机模型是一种离散化的交通仿真方法,通过将道路划分为多个网格单元,每个网格单元代表一个车辆所在的位置,模拟车辆在交叉口的动态行为。借助于智能网联车辆信息互享的特点,本文优化了元胞自动机模型中的减速规则和安全间距,引入了无反应时间的安全间距,构建了更加精确的交通流模型。
在模型构建过程中,本文重点优化了车辆的减速与加速规则,去除了传统元胞自动机模型中的随机慢化因素。这是因为在智能网联环境下,车辆通过实时获取邻近车辆的信息,无需通过随机慢化来模拟不确定性。因此,本文模型中的车辆能够更加精准地进行减速和加速,从而保证了交通流的平稳性和流畅性。此外,本文构建了双向六车道的十字交叉无信号控制仿真平台,通过动态仿真平台来模拟不同交通场景下的交叉口交通流动情况,并选取车辆平均通行延误时间和加速度变化率为主要评价指标,以评估协同控制的实施效果。这些指标能够很好地反映交通流的效率和驾驶舒适度,有助于全面评估不同控制策略对交叉口性能的影响。
(3) 基于深度强化学习的无信号交叉口协同控制算法设计
在无信号交叉口环境中,车辆之间缺乏明确的信号灯指示,这就要求车辆能够自主决策,以确保交叉口处的高效通行。本文基于深度强化学习技术,提出了一种用于智能网联车辆在无信号交叉口环境下的协同控制优化算法。深度强化学习是一种结合了深度神经网络与强化学习的技术,能够通过不断学习和试错来获得最优策略,特别适用于这种复杂的动态交通环境。
在算法设计过程中,本文选择了目标车辆及其周围的参考车辆的状态信息(包括当前位置、速度和车道索引)作为状态输入,采用加速度作为车辆在当前时刻的动作变量。通过将交通效率、行车安全等因素作为多目标奖励的依据,深度强化学习模型能够逐步学习如何在复杂的交叉口环境中做出最优决策,最大程度地减少车辆之间的冲突,提高通行效率。本文还引入了速度控制、轨迹优化和路权分配等多变量因素来增强算法的综合性能,使得车辆能够灵活地应对不同交通状况。
为了实现这种协同控制,本文建立了交通状态与车辆动作之间的映射关系,使得目标车辆能够在复杂的环境中选择最合适的行动策略。例如,当多个车辆同时接近交叉口时,深度强化学习算法会评估每辆车的速度和位置,根据当前的交通状况来决定哪辆车应优先通行,从而有效减少交叉口处的冲突。仿真结果显示,该算法在交通流量较大时依然能够保持较高的通行效率,与传统的定时信号控制相比,车辆的平均延误时间显著减少,交通事故的发生概率也显著降低,充分验证了深度强化学习算法在无信号交叉口协同控制中的有效性。
(4) 仿真与效果验证
为了验证所提出的协同控制算法的实际效果,本文利用所构建的交通流仿真平台对不同控制策略下的交通效率和舒适度进行了对比分析。仿真平台能够模拟不同交通流量和不同类型的交叉口场景,并实时评估车辆的通行情况。在实验过程中,本文将基于深度强化学习的协同控制策略与传统的定时信号控制策略进行了对比,评估不同控制策略在交通效率、舒适度等方面的表现。
仿真结果表明,基于深度强化学习的协同控制算法在无信号交叉口环境下的表现明显优于传统的定时信号控制。首先,在交通效率方面,智能网联车辆通过深度强化学习的协同控制,平均延误时间显著减少,车辆的平均通行速度也得到了提高。这是因为深度强化学习算法能够实时根据交通状况进行决策,确保每辆车在适当的时间通过交叉口,从而有效减少了车辆的等待时间和交叉口的排队长度。其次,在舒适度方面,由于车辆的加速度变化率得到了有效控制,驾驶的平顺性得到了提升,乘客的乘坐体验更加舒适。最后,在安全性方面,通过提前进行冲突检测和智能决策,车辆之间的冲突得到了有效消解,交叉口的事故发生率显著降低。
总体来看,基于深度强化学习的无信号交叉口智能网联车辆协同控制优化算法通过结合多目标奖励机制、深度神经网络和强化学习技术,成功解决了无信号交叉口处的车辆冲突问题,并显著提高了通行效率和行车安全。该算法为未来智能交通系统的优化提供了新的研究思路和技术支撑,具有较高的实际应用价值。
% Initialization parameters
num_vehicles = 20; % Number of vehicles approaching the intersection
max_steps = 200; % Maximum simulation steps
learning_rate = 0.01; % Learning rate for the reinforcement learning agent
state_size = 3; % State size: position, speed, lane index
action_size = 3; % Action size: accelerate, decelerate, maintain speed
% Initialize vehicle states and Q-table
vehicle_states = rand(num_vehicles, state_size);
q_table = zeros(num_vehicles, state_size, action_size);
rewards = zeros(num_vehicles, 1);
% Main reinforcement learning loop
for step = 1:max_steps
for v = 1:num_vehicles
% Select action using epsilon-greedy policy
if rand < 0.1 % Exploration
action = randi([1, action_size]);
else % Exploitation
[~, action] = max(q_table(v, :, :));
end
% Apply action and update vehicle state
if action == 1 % Accelerate
vehicle_states(v, 2) = min(vehicle_states(v, 2) + 1, 10);
elseif action == 2 % Decelerate
vehicle_states(v, 2) = max(vehicle_states(v, 2) - 1, 0);
end
% Update position based on speed
vehicle_states(v, 1) = vehicle_states(v, 1) + vehicle_states(v, 2);
% Calculate reward based on distance to intersection and speed
if vehicle_states(v, 1) > 100
rewards(v) = -10; % Penalty for passing the intersection too quickly
elseif vehicle_states(v, 1) < 0
rewards(v) = -10; % Penalty for reversing
else
rewards(v) = 1 - abs(vehicle_states(v, 1) - 50) / 50; % Reward for staying near the center
end
% Update Q-table using Q-learning update rule
best_next_action = max(q_table(v, :, :));
q_table(v, :, action) = q_table(v, :, action) + learning_rate * (rewards(v) + 0.9 * best_next_action - q_table(v, :, action));
end
end
% Output the final Q-table
disp('Final Q-table:');
disp(q_table);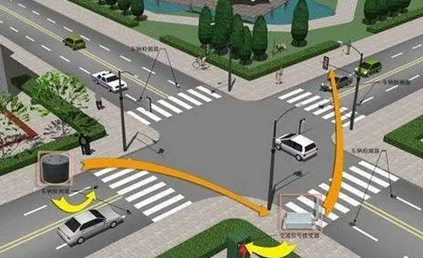



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











