






/**
* @brief USART去初始化
*
* 复位USART到默认状态。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
*/
void USART_DeInit(USART_TypeDef* USARTx);
/**
* @brief USART初始化
*
* 根据指定的初始化结构体配置USART参数。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_InitStruct USART初始化结构体指针,包含配置信息
*/
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
/**
* @brief USART初始化结构体默认配置
*
* 将USART初始化结构体设置为默认参数。
*
* @param USART_InitStruct USART初始化结构体指针,将被设置为默认配置
*/
void USART_StructInit(USART_InitTypeDef* USART_InitStruct);
/**
* @brief USART时钟初始化
*
* 根据指定的时钟初始化结构体配置USART的时钟参数。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_ClockInitStruct USART时钟初始化结构体指针,包含时钟配置信息
*/
void USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct);
/**
* @brief USART时钟初始化结构体默认配置
*
* 将USART时钟初始化结构体设置为默认参数。
*
* @param USART_ClockInitStruct USART时钟初始化结构体指针,将被设置为默认配置
*/
void USART_ClockStructInit(USART_ClockInitTypeDef* USART_ClockInitStruct);
/**
* @brief USART使能/失能
*
* 使能或失能USART。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 使能/失能状态
*/
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART中断配置
*
* 配置USART的中断源。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_IT USART中断类型
* @param NewState 中断使能/失能状态
*/
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
/**
* @brief USART DMA使能/失能
*
* 使能或失能USART的DMA请求。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_DMAReq DMA请求类型
* @param NewState DMA使能/失能状态
*/
void USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState);
/**
* @brief USART设置地址
*
* 设置USART的地址。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_Address USART地址
*/
void USART_SetAddress(USART_TypeDef* USARTx, uint8_t USART_Address);
/**
* @brief USART唤醒配置
*
* 配置USART的唤醒功能。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_WakeUp 唤醒配置
*/
void USART_WakeUpConfig(USART_TypeDef* USARTx, uint16_t USART_WakeUp);
/**
* @brief USART接收器唤醒使能/失能
*
* 使能或失能USART接收器的唤醒功能。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 唤醒功能使能/失能状态
*/
void USART_ReceiverWakeUpCmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART LIN中断检测长度配置
*
* 配置USART在LIN模式下的中断检测长度。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_LINBreakDetectLength LIN中断检测长度
*/
void USART_LINBreakDetectLengthConfig(USART_TypeDef* USARTx, uint16_t USART_LINBreakDetectLength);
/**
* @brief USART LIN模式使能/失能
*
* 使能或失能USART的LIN模式。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState LIN模式使能/失能状态
*/
void USART_LINCmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART发送数据
*
* 通过指定的USART发送一个数据字节。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param Data 要发送的数据
*/
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
/**
* @brief USART接收数据
*
* 从指定的USART接收一个数据字节。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @return 接收到的数据
*/
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
/**
* @brief USART发送中断信号
*
* 通过指定的USART发送一个中断信号(即一个特殊的帧)。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
*/
void USART_SendBreak(USART_TypeDef* USARTx);
/**
* @brief USART设置保护时间
*
* 设置USART的空闲线检测或地址帧检测的保护时间。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_GuardTime 保护时间值
*/
void USART_SetGuardTime(USART_TypeDef* USARTx, uint8_t USART_GuardTime);
/**
* @brief USART设置分频器
*
* 设置USART的波特率生成器的分频器值。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_Prescaler 分频器值
*/
void USART_SetPrescaler(USART_TypeDef* USARTx, uint8_t USART_Prescaler);
/**
* @brief USART智能卡模式使能/失能
*
* 使能或失能USART的智能卡模式。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 使能/失能状态
*/
void USART_SmartCardCmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART智能卡NACK使能/失能
*
* 使能或失能USART的智能卡NACK响应。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 使能/失能状态
*/
void USART_SmartCardNACKCmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART半双工模式使能/失能
*
* 使能或失能USART的半双工模式。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 使能/失能状态
*/
void USART_HalfDuplexCmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART过采样8位使能/失能
*
* 使能或失能USART的过采样8位模式。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 使能/失能状态
*/
void USART_OverSampling8Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART单比特数据方法使能/失能
*
* 使能或失能USART的单比特数据发送和接收模式。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 使能/失能状态
*/
void USART_OneBitMethodCmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART红外模式配置
*
* 配置USART的红外模式参数。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_IrDAMode 红外模式配置
*/
void USART_IrDAConfig(USART_TypeDef* USARTx, uint16_t USART_IrDAMode);
/**
* @brief USART红外模式使能/失能
*
* 使能或失能USART的红外模式。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param NewState 使能/失能状态
*/
void USART_IrDACmd(USART_TypeDef* USARTx, FunctionalState NewState);
/**
* @brief USART获取标志状态
*
* 读取并返回指定的USART标志的当前状态。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_FLAG USART标志,指定要检查的标志
* @return 标志状态,SET表示标志被设置,RESET表示标志未被设置
*/
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
/**
* @brief USART清除标志
*
* 清除指定的USART标志。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_FLAG USART标志,指定要清除的标志
*/
void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);
/**
* @brief USART获取中断状态
*
* 读取并返回指定的USART中断的当前状态。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_IT USART中断,指定要检查的中断
* @return 中断状态,SET表示中断被触发,RESET表示中断未被触发
*/
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
/**
* @brief USART清除中断挂起位
*
* 清除指定的USART中断的挂起位。
*
* @param USARTx USART结构体指针,指定要操作的USART实例
* @param USART_IT USART中断,指定要清除的中断
*/
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
USART(Universal Synchronous Asynchronous Receiver Transmitter)是一种串行通信协议,通常用于在微控制器和外部设备之间进行数据传输。USART可以在同步或异步模式下运行,因此它具有很高的灵活性和广泛的应用。以下是USART通信的基本原理:
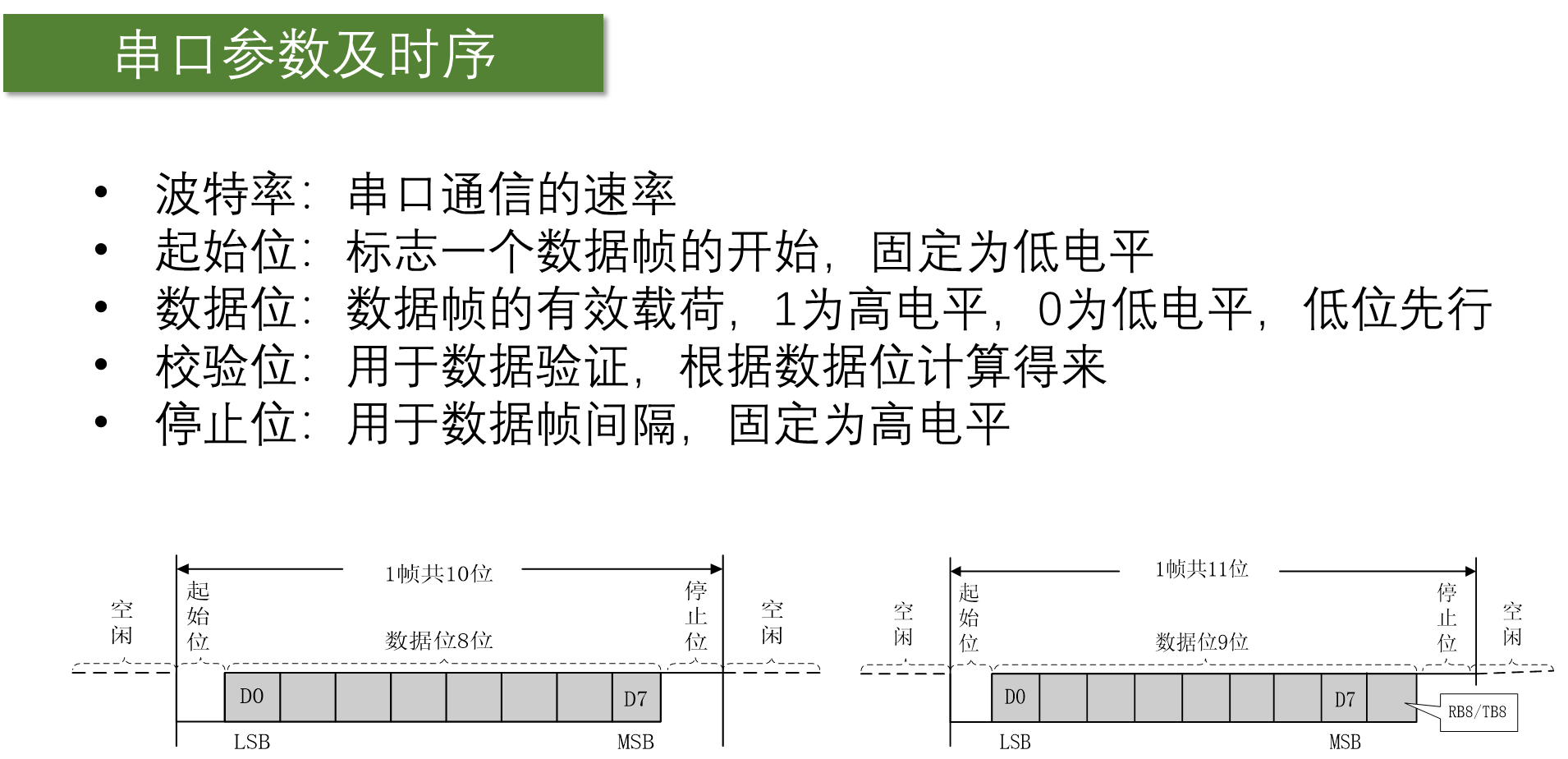
- 数据帧格式:
- USART通信的基本单位是数据帧。数据帧由起始位、数据位、可选的奇偶校验位和停止位组成。
- 起始位指示数据帧的开始,告诉接收器开始接收数据。
- 数据位是实际的数据传输位,它可以是5到9位之间的任何数量。
- 奇偶校验位用于错误检测和纠正,可选的。
- 停止位指示数据帧的结束,允许接收器做好接收下一个数据帧的准备。
- 异步模式:
- 在异步模式下,数据传输没有外部时钟同步。发送和接收的双方需要使用相同的波特率来同步数据传输。
- 通信的每个数据帧都以起始位开始,然后是数据位,接着是可选的奇偶校验位,最后是一个或多个停止位。
- 同步模式:
- 在同步模式下,数据传输通过外部时钟信号同步。通信双方都使用相同的时钟信号来协调数据传输。
- 数据传输速率(波特率)在通信的双方之间是事先协商好的。
- 通信流程:
- 发送端首先将数据加载到USART的发送缓冲区。
- 发送器开始发送数据帧,一次一个比特,直到数据帧的所有比特都发送完毕。
- 接收端在检测到起始位后开始接收数据,并在整个数据帧期间接收每个比特。
- 如果已启用奇偶校验,接收端会验证数据的奇偶性以检测错误。
- 最后,接收端等待停止位,然后接收器将数据存储在接收缓冲区中供后续处理。
- 错误检测和处理:
- USART通信可以通过奇偶校验位来检测错误,但它并不能纠正错误。
- 如果数据传输中出现错误,通常需要重新发送数据或采取其他纠正措施来解决问题。
USART通信是一种灵活且可靠的串行通信协议,它广泛应用于许多嵌入式系统和通信设备中,如串行通信接口(RS-232),蓝牙模块等。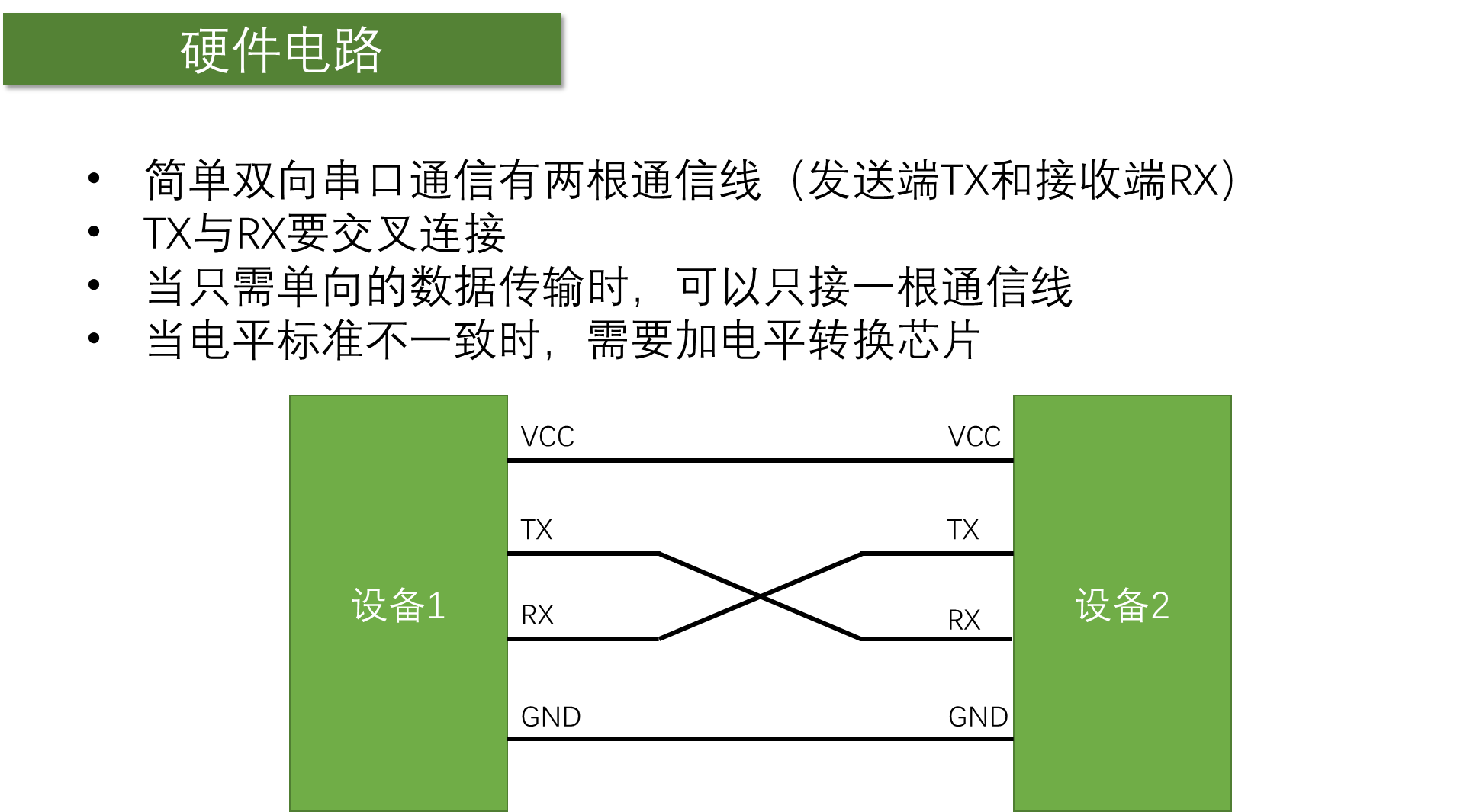

printf三种重定向:
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}
/*方法1:直接重定向printf,但printf函数只有一个,此方法不能在多处使用*/
printf("\r\nNum2=%d", 222); //串口发送printf打印的格式化字符串
//需要重定向fputc函数,并在工程选项里勾选Use MicroLIB
/*方法2:使用sprintf打印到字符数组,再用串口发送字符数组,此方法打印到字符数组,之后想怎么处理都可以,可在多处使用*/
char String[100]; //定义字符数组
sprintf(String, "\r\nNum3=%d", 333);//使用sprintf,把格式化字符串打印到字符数组
Serial_SendString(String); //串口发送字符数组(字符串)
/*方法3:将sprintf函数封装起来,实现专用的printf,此方法就是把方法2封装起来,更加简洁实用,可在多处使用*/
Serial_Printf("\r\nNum4=%d", 444); //串口打印字符串,使用自己封装的函数实现printf的效果
Serial_Printf("\r\n");
发送汉字:1.设置汉字编码格式:Configuration – Encoding
2.避免编译器报错:打开工程 – C/C++ – MISC contrlos – 录入 --no-multibyte-chars
一. 串口发送
- 开启时钟
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
- GPIO初始化
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
- USART初始化
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx; //模式,选择为发送模式
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
- USART使能
*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
- 串口发送一个字节
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
- 串口发送一个数组
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++) //遍历数组
{
Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
- 串口发送一个字符串
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止
{
Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
- 次方函数(内部使用)
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
- 串口发送数字
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字
}
}
- 使用printf需要重定向的底层函数
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}
- 自己封装的prinf函数
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}
二. 接收发送
- 开启时钟
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
- GPIO初始化
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入
- USART初始化
/*USART初始化*/
USART_InitTypeDef USART_InitStructure; //定义结构体变量
USART_InitStructure.USART_BaudRate = 9600; //波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位
USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1
- 中断输出配置
/*中断输出配置*/
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断
// 定义USART的奇偶错误中断标志位。这通常表示接收到的字符的奇偶校验与预期的不匹配。
#define USART_IT_PE ((uint16_t)0x0028)
// 定义USART的发送数据寄存器空中断标志位。当发送数据寄存器为空时,可以发送下一个字节。
#define USART_IT_TXE ((uint16_t)0x0727)
// 定义USART的传输完成中断标志位。这表示一个完整的字节或帧已经被发送。
#define USART_IT_TC ((uint16_t)0x0626)
// 定义USART的接收数据寄存器非空中断标志位。这表示接收数据寄存器中已经有数据可读。
#define USART_IT_RXNE ((uint16_t)0x0525)
// 定义USART的空闲线路检测中断标志位。这通常表示线路在一段时间内处于空闲状态。
#define USART_IT_IDLE ((uint16_t)0x0424)
// 定义USART的LIN(本地互连网络)断开检测中断标志位。在LIN通信中,这表示检测到断开条件。
#define USART_IT_LBD ((uint16_t)0x0846)
// 定义USART的CTS(清除发送)中断标志位。这通常用于硬件流控制,表示对方准备好接收数据。
#define USART_IT_CTS ((uint16_t)0x096A)
// 定义USART的错误中断标志位的通用掩码。通常用于组合多个错误中断(ORE, NE, FE)。
#define USART_IT_ERR ((uint16_t)0x0060)
// 定义USART的帧错误中断标志位。这表示接收到的帧格式不正确。
#define USART_IT_ORE ((uint16_t)0x0360) // 注意:这里的ORE可能是OE(溢出错误)的误写
// 定义USART的噪声错误或奇偶校验中断标志位。这可能表示接收到的数据包含噪声或奇偶校验错误。
#define USART_IT_NE ((uint16_t)0x0260)
// 定义USART的帧格式错误中断标志位。这通常表示接收到的字符格式不正确(例如,停止位缺失或错误)。
#define USART_IT_FE ((uint16_t)0x0160)
- NVIC中断分组
/*NVIC中断分组*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2
// 设置NVIC的优先级分组为0,即0位用于抢占优先级,4位用于子优先级
#define NVIC_PriorityGroup_0 ((uint32_t)0x700) /*!< 0 bits for pre-emption priority
4 bits for subpriority */
// 设置NVIC的优先级分组为1,即1位用于抢占优先级,3位用于子优先级
#define NVIC_PriorityGroup_1 ((uint32_t)0x600) /*!< 1 bits for pre-emption priority
3 bits for subpriority */
// 设置NVIC的优先级分组为2,即2位用于抢占优先级,2位用于子优先级
#define NVIC_PriorityGroup_2 ((uint32_t)0x500) /*!< 2 bits for pre-emption priority
2 bits for subpriority */
// 设置NVIC的优先级分组为3,即3位用于抢占优先级,1位用于子优先级
#define NVIC_PriorityGroup_3 ((uint32_t)0x400) /*!< 3 bits for pre-emption priority
1 bits for subpriority */
// 设置NVIC的优先级分组为4,即4位全部用于抢占优先级,没有子优先级
#define NVIC_PriorityGroup_4 ((uint32_t)0x300) /*!< 4 bits for pre-emption priority
0 bits for subpriority */
- NVIC配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
- USART使能
/*USART使能*/
USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行
- 串口发送一个字节
/**
* 函 数:串口发送一个字节
* 参 数:Byte 要发送的一个字节
* 返 回 值:无
*/
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成
/*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/
}
- 串口发送一个数组
/**
* 函 数:串口发送一个数组
* 参 数:Array 要发送数组的首地址
* 参 数:Length 要发送数组的长度
* 返 回 值:无
*/
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++) //遍历数组
{
Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
- 串口发送一个字符串
/**
* 函 数:串口发送一个字符串
* 参 数:String 要发送字符串的首地址
* 返 回 值:无
*/
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止
{
Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据
}
}
- 次方函数(内部使用)
/**
* 函 数:次方函数(内部使用)
* 返 回 值:返回值等于X的Y次方
*/
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1; //设置结果初值为1
while (Y --) //执行Y次
{
Result *= X; //将X累乘到结果
}
return Result;
}
- 串口发送数字
/**
* 函 数:串口发送数字
* 参 数:Number 要发送的数字,范围:0~4294967295
* 参 数:Length 要发送数字的长度,范围:0~10
* 返 回 值:无
*/
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字
}
}
- 使用printf需要重定向的底层函数
/**
* 函 数:使用printf需要重定向的底层函数
* 参 数:保持原始格式即可,无需变动
* 返 回 值:保持原始格式即可,无需变动
*/
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数
return ch;
}
- 自己封装的prinf函数
/**
* 函 数:自己封装的prinf函数
* 参 数:format 格式化字符串
* 参 数:... 可变的参数列表
* 返 回 值:无
*/
void Serial_Printf(char *format, ...)
{
char String[100]; //定义字符数组
va_list arg; //定义可变参数列表数据类型的变量arg
va_start(arg, format); //从format开始,接收参数列表到arg变量
vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中
va_end(arg); //结束变量arg
Serial_SendString(String); //串口发送字符数组(字符串)
}
- 获取串口接收标志位
/**
* 函 数:获取串口接收标志位
* 参 数:无
* 返 回 值:串口接收标志位,范围:0~1,接收到数据后,标志位置1,读取后标志位自动清零
*/
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1) //如果标志位为1
{
Serial_RxFlag = 0;
return 1; //则返回1,并自动清零标志位
}
return 0; //如果标志位为0,则返回0
}
- 获取串口接收的数据
/**
* 函 数:获取串口接收的数据
* 参 数:无
* 返 回 值:接收的数据,范围:0~255
*/
uint8_t Serial_GetRxData(void)
{
return Serial_RxData; //返回接收的数据变量
}
- USART1中断函数
/**
* 函 数:USART1中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断
{
Serial_RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量
Serial_RxFlag = 1; //置接收标志位变量为1
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除USART1的RXNE标志位
//读取数据寄存器会自动清除此标志位
//如果已经读取了数据寄存器,也可以不执行此代码
}
}
三. 串口收发HEX数据包
/**
* 函 数:USART1中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0; //定义表示当前状态机状态的静态变量
static uint8_t pRxPacket = 0; //定义表示当前接收数据位置的静态变量
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断
{
uint8_t RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量
/*使用状态机的思路,依次处理数据包的不同部分*/
/*当前状态为0,接收数据包包头*/
if (RxState == 0)
{
if (RxData == 0xFF) //如果数据确实是包头
{
RxState = 1; //置下一个状态
pRxPacket = 0; //数据包的位置归零
}
}
/*当前状态为1,接收数据包数据*/
else if (RxState == 1)
{
Serial_RxPacket[pRxPacket] = RxData; //将数据存入数据包数组的指定位置
pRxPacket ++; //数据包的位置自增
if (pRxPacket >= 4) //如果收够4个数据
{
RxState = 2; //置下一个状态
}
}
/*当前状态为2,接收数据包包尾*/
else if (RxState == 2)
{
if (RxData == 0xFE) //如果数据确实是包尾部
{
RxState = 0; //状态归0
Serial_RxFlag = 1; //接收数据包标志位置1,成功接收一个数据包
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除标志位
}
}
四. 串口收发文本数据包
/**
* 函 数:USART1中断函数
* 参 数:无
* 返 回 值:无
* 注意事项:此函数为中断函数,无需调用,中断触发后自动执行
* 函数名为预留的指定名称,可以从启动文件复制
* 请确保函数名正确,不能有任何差异,否则中断函数将不能进入
*/
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0; //定义表示当前状态机状态的静态变量
static uint8_t pRxPacket = 0; //定义表示当前接收数据位置的静态变量
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断
{
uint8_t RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量
/*使用状态机的思路,依次处理数据包的不同部分*/
/*当前状态为0,接收数据包包头*/
if (RxState == 0)
{
if (RxData == '@' && Serial_RxFlag == 0) //如果数据确实是包头,并且上一个数据包已处理完毕
{
RxState = 1; //置下一个状态
pRxPacket = 0; //数据包的位置归零
}
}
/*当前状态为1,接收数据包数据,同时判断是否接收到了第一个包尾*/
else if (RxState == 1)
{
if (RxData == '\r') //如果收到第一个包尾
{
RxState = 2; //置下一个状态
}
else //接收到了正常的数据
{
Serial_RxPacket[pRxPacket] = RxData; //将数据存入数据包数组的指定位置
pRxPacket ++; //数据包的位置自增
}
}
/*当前状态为2,接收数据包第二个包尾*/
else if (RxState == 2)
{
if (RxData == '\n') //如果收到第二个包尾
{
RxState = 0; //状态归0
Serial_RxPacket[pRxPacket] = '\0'; //将收到的字符数据包添加一个字符串结束标志
Serial_RxFlag = 1; //接收数据包标志位置1,成功接收一个数据包
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除标志位
}
}















 1700
1700











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









