







 本文深入探讨了STDC网络,一种针对实时语义分割问题的高效结构。作者通过改进BiSeNet的multi-path结构,提出STDC模块,减少计算量并保持多尺度特征的提取。STDC网络在Cityscapes和CamVid数据集上表现出色,实现了速度与精度的良好平衡。此外,文章介绍了网络的详细实现,包括不同模块的原理和代码示例。
本文深入探讨了STDC网络,一种针对实时语义分割问题的高效结构。作者通过改进BiSeNet的multi-path结构,提出STDC模块,减少计算量并保持多尺度特征的提取。STDC网络在Cityscapes和CamVid数据集上表现出色,实现了速度与精度的良好平衡。此外,文章介绍了网络的详细实现,包括不同模块的原理和代码示例。
1、主要参考
(1)参考的blog
【语义分割】——STDC-Seg快又强 + 细节边缘的监督_农夫山泉2号的博客-CSDN博客_stdcseg
【CVPR2021语义分割】STDC语义分割网络|BiSeNet的轻量化加强版 - 知乎
【STDC】《Rethinking BiSeNet For Real-time Semantic Segmentation》_bryant_meng的博客-CSDN博客
(2)github地址
https://github.com/chenjun2hao/STDC-Seg(3)论文下载地址
(4)作者单位:
美团,做外卖机器人?
2、主要原理
2.1论文题目
Rethinking BiSeNet For Real-time Semantic Segmentation
Rethinking说明了一切
关于v1和v2的整理见下面文档
(24)语义分割--BiSeNetV1 和 BiSeNetV2_chencaw的博客-CSDN博客
2.2摘要看看先
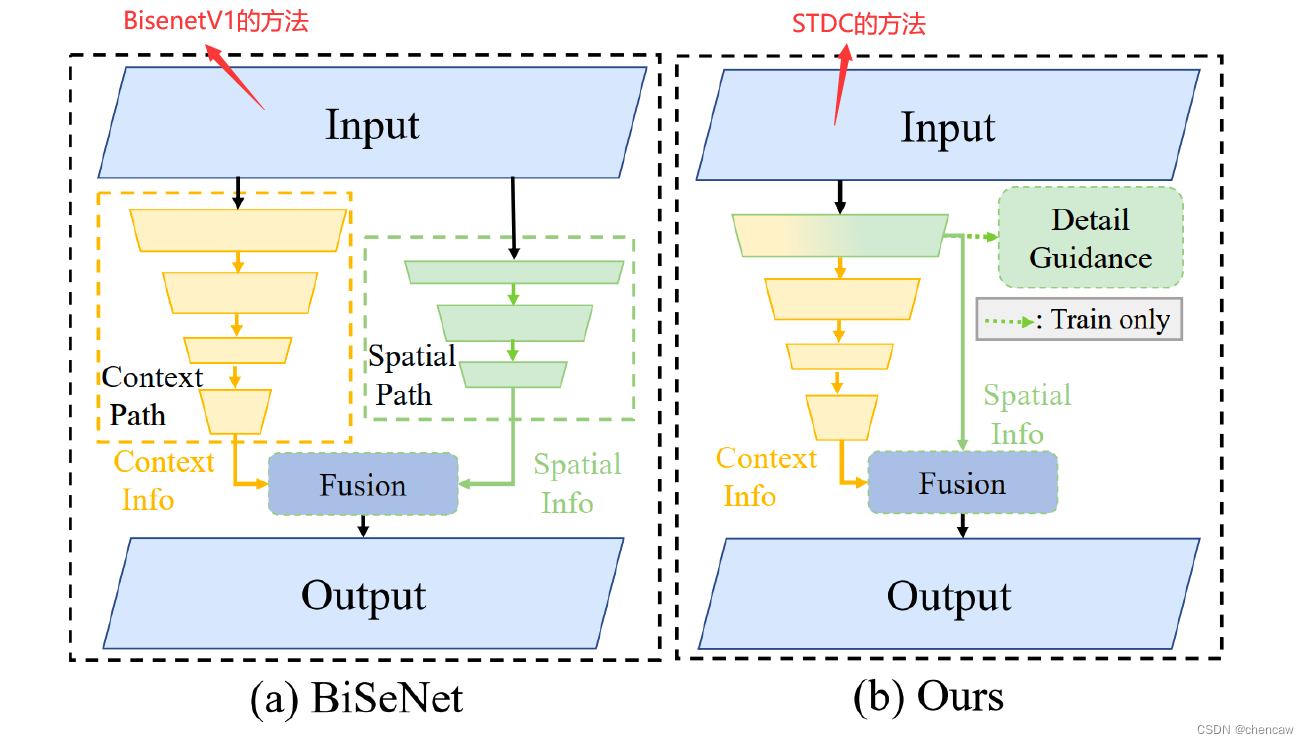
- BiSeNet[28,27]已被证明是一种流行的用于实时分割的双流网络。但是,它通过额外的通道来编码空间信息的方法是耗时的。而且主干网从预先训练过模型而来,比如图像分类的网络,由于特定任务设计的不同,可能无法有效地进行图像分割。
- 为了解决这些问题,我们提出了一种新的、有效的结构,即短期密集级联网络(Short-Term Dense Concatenate networkSTDC network),它消除了结构冗余。
- 具体来说,我们逐步降低特征图的维数,利用特征图的聚合来表示图像,形成了STDC网络的基本模块。在解码器中,我们提出了一个细节聚合模块,将空间信息的学习以单流的方式集成到底层。最后,融合底层特征和深层特征,预测最终的分割结果。
- 在Cityscapes和CamVid数据集上的大量实验证明了我们的方法的有效性,实现了分割精度和推理速度之间的良好平衡。
- 在cityscape上,我们在测试集上实现了71.9%的mIoU,在NVIDIA GTX 1080Ti上的速度为250.4 FPS,比最新的方法快45.2%。在更高图像分辨率上以97.0 FPS的速度推断,实现了76.8%的mIoU。
2.3 研究背景

(1)当前的实时语义分割方法:
- 在实时推理方面,一些工作,如(1)DFANet[18]和BiSeNetV1[28]选择了轻量级的主干,并研究了特征融合或聚合模块的方法来补偿精度的下降。用了空间信息XXX不好,预训练模型是分类来的,如何不好
- (2)另一些工作通过降低输入分辨率,如何XXXXX不好
2.4 STDC网络
作者提出了STDC模块,能够使用较少的参数量提取多尺度特征,且能够很方便地集成到U-Net类型的语义分割网络中;对BiSeNet中的multi-path结构做出改进,在提取底层细节特征的同时减少网络计算量。
2.4.1 STDC模块的原理
(1)通用的STDC结构如下图a所示
(2)本文提出的STDC结构,没有stride=2的(下采样的)如图b所示
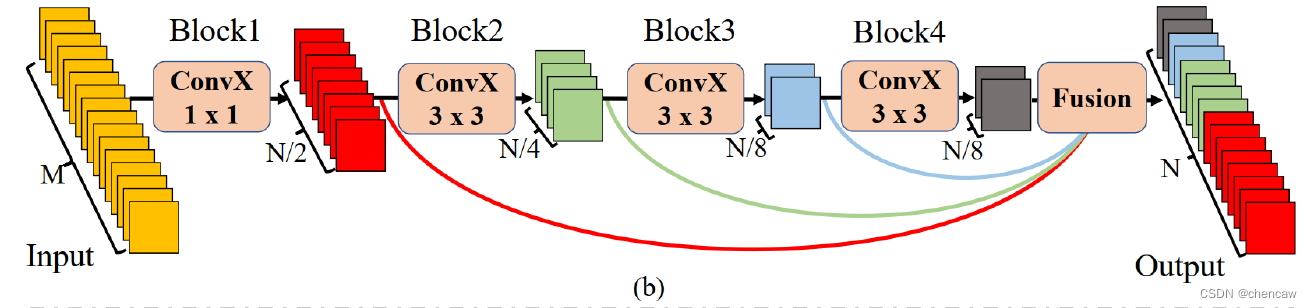
其中,图中的ConvX表示“卷积+BN+ReLU”操作,M表示输入特征通道数,N表示输出特征通道数。每个模块ConvX有着不同的核大小
下面引用了大佬的翻译
【CVPR2021语义分割】STDC语义分割网络|BiSeNet的轻量化加强版 - 知乎
- 在STDC模块中,第1个block的卷积核尺寸为1×1,其余block的卷积核尺寸为3×3。
- 若STDC模块的最终输出通道数为N,除最后一个block外,该模块内第i个block的输出通道数为N/2i;最后一个block的输出特征通道数与倒数第二个block保持一致。
- 与传统的backbone不同的是,STDC模块中深层的特征通道数少,浅层的特征通道数多。作者认为,浅层需要更多通道的特征编码细节信息;深层更关注高层次语义信息,过多的特征通道数量会导致信息冗余。
- STDC模块最终的输出为各block输出特征的融合,即
上式中的F表示融合函数,x1,x2,…,xn表示n个block的输出,xoutput 表示STDC模块的输出。使用concatenation操作融合n个block的特征。
(3)本文提出的STDC结构,包含stride=2的如图c所示
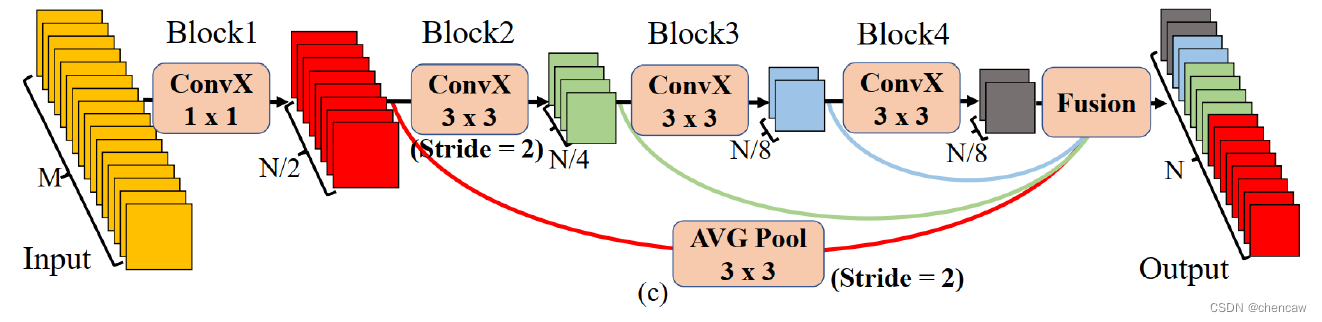
PS注意看:上图中Block2中有一个stride=2,AVG Pool中也有一个stride=2
对于stride=2版本的STDC模块,在Block2中进行下采样操作;为了在融合时保证feature map尺寸一致,对大尺寸的feature map使用stride=2、3×3的average pooling操作进行下采样
STDC模块有2个特点:(1)随着网络加深,逐渐减少特征通道数,以减少计算量;(2)STDC的输出融合了多个block的输出feature map,包含多尺度信息。
2.4.2 本文网络的结构
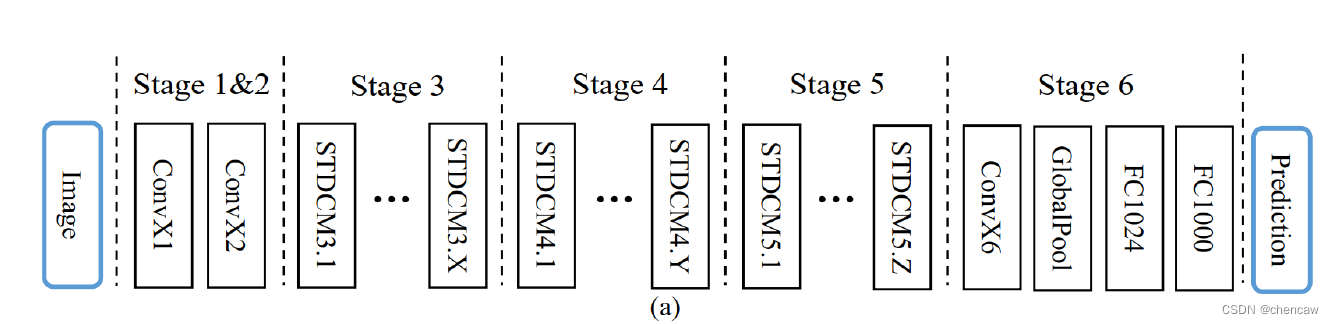
(1)下图表示由STDC模块组成的STDC网络,就是上面也提过的图a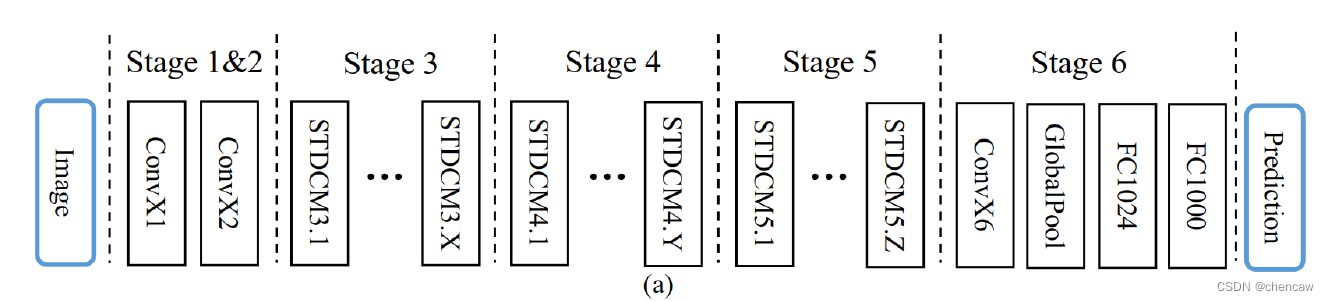
- 该网络包含6个Stage,Stage1~Stage5中都对feature map进行了步长为2的下采样,Stage6输出预测结果。
- 为了减少计算量,Stage1和Stage2中只使用1个卷积层。Stage3~Stage5中每个Stage包含若干个STDC模块,其中第1个STDC模块包含下采样操作,其余STDC模块保持feature map尺寸不变。
以上图为框架,作者构建了2个STDC网络,分别命名为STDC1和STDC2,它们的结构如下表所示:
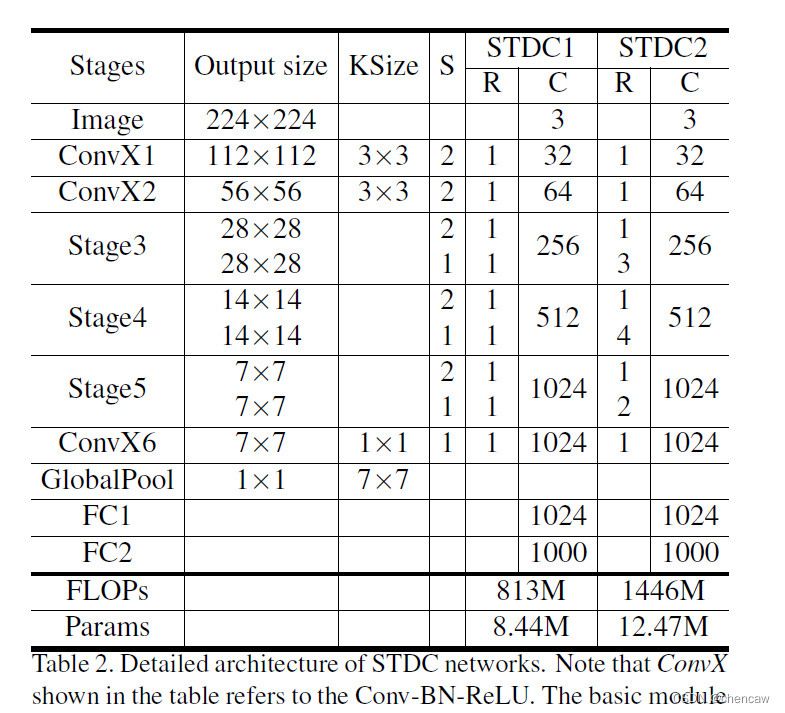
表中的ConvX表示“卷积+BN+ReLU”操作,Stage3~Stage5均由若干个STDC模块组成。上表中的KSize表示kernel尺寸,S表示步长,R表示重复次数,C表示输出通道数。
2.5 STDC网络的分类测试
针对如下例子,参加前面整理的教程
(2)pokeman_简单卷积分类的例子_chencaw的博客-CSDN博客
2.5.1 使用了作者的网络
(1)简单的文件stdcnet.py,作者的github提供,无需更改
import torch
import torch.nn as nn
from torch.nn import init
import math
from torch.nn import functional as F #额外添加一下,陈20221104
class ConvX(nn.Module):
def __init__(self, in_planes, out_planes, kernel=3, stride=1):
super(ConvX, self).__init__()
self.conv = nn.Conv2d(in_planes, out_planes, kernel_size=kernel, stride=stride, padding=kernel//2, bias=False)
self.bn = nn.BatchNorm2d(out_planes)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
out = self.relu(self.bn(self.conv(x)))
return out
class AddBottleneck(nn.Module):
def __init__(self, in_planes, out_planes, block_num=3, stride=1):
super(AddBottleneck, self).__init__()
assert block_num > 1, print("block number should be larger than 1.")
self.conv_list = nn.ModuleList()
self.stride = stride
if stride == 2:
self.avd_layer = nn.Sequential(
nn.Conv2d(out_planes//2, out_planes//2, kernel_size=3, stride=2, padding=1, groups=out_planes//2, bias=False),
nn.BatchNorm2d(out_planes//2),
)
self.skip = nn.Sequential(
nn.Conv2d(in_planes, in_planes, kernel_size=3, stride=2, padding=1, groups=in_planes, bias=False),
nn.BatchNorm2d(in_planes),
nn.Conv2d(in_planes, out_planes, kernel_size=1, bias=False),
nn.BatchNorm2d(out_planes),
)
stride = 1
for idx in range(block_num):
if idx == 0:
self.conv_list.append(ConvX(in_planes, out_planes//2, kernel=1))
elif idx == 1 and block_num == 2:
self.conv_list.append(ConvX(out_planes//2, out_planes//2, stride=stride))
elif idx == 1 and block_num > 2:
self.conv_list.append(ConvX(out_planes//2, out_planes//4, stride=stride))
elif idx < block_num - 1:
self.conv_list.append(ConvX(out_planes//int(math.pow(2, idx)), out_planes//int(math.pow(2, idx+1))))
else:
self.conv_list.append(ConvX(out_planes//int(math.pow(2, idx)), out_planes//int(math.pow(2, idx))))
def forward(self, x):
out_list = []
out = x
for idx, conv in enumerate(self.conv_list):
if idx == 0 and self.stride == 2:
out = self.avd_layer(conv(out))
else:
out = conv(out)
out_list.append(out)
if self.stride == 2:
x = self.skip(x)
return torch.cat(out_list, dim=1) + x
class CatBottleneck(nn.Module):
def __init__(self, in_planes, out_planes, block_num=3, stride=1):
super(CatBottleneck, self).__init__()
assert block_num > 1, print("block number should be larger than 1.")
self.conv_list = nn.ModuleList()
self.stride = stride
if stride == 2:
self.avd_layer = nn.Sequential(
nn.Conv2d(out_planes//2, out_planes//2, kernel_size=3, stride=2, padding=1, groups=out_planes//2, bias=False),
nn.BatchNorm2d(out_planes//2),
)
self.skip = nn.AvgPool2d(kernel_size=3, stride=2, padding=1)
stride = 1
for idx in range(block_num):
if idx == 0:
self.conv_list.append(ConvX(in_planes, out_planes//2, kernel=1))
elif idx == 1 and block_num == 2:
self.conv_list.append(ConvX(out_planes//2, out_planes//2, stride=stride))
elif idx == 1 and block_num > 2:
self.conv_list.append(ConvX(out_planes//2, out_planes//4, stride=stride))
elif idx < block_num - 1:
self.conv_list.append(ConvX(out_planes//int(math.pow(2, idx)), out_planes//int(math.pow(2, idx+1))))
else:
self.conv_list.append(ConvX(out_planes//int(math.pow(2, idx)), out_planes//int(math.pow(2, idx))))
def forward(self, x):
out_list = []
out1 = self.conv_list[0](x)
for idx, conv in enumerate(self.conv_list[1:]):
if idx == 0:
if self.stride == 2:
out = conv(self.avd_layer(out1))
else:
out = conv(out1)
else:
out = conv(out)
out_list.append(out)
if self.stride == 2:
out1 = self.skip(out1)
out_list.insert(0, out1)
out = torch.cat(out_list, dim=1)
return out
#STDC2Net
class STDCNet1446(nn.Module):
def __init__(self, base=64, layers=[4,5,3], block_num=4, type="cat", num_classes=1000, dropout=0.20, pretrain_model='', use_conv_last=False):
super(STDCNet1446, self).__init__()
if type == "cat":
block = CatBottleneck
elif type == "add":
block = AddBottleneck
self.use_conv_last = use_conv_last
self.features = self._make_layers(base, layers, block_num, block)
self.conv_last = ConvX(base*16, max(1024, base*16), 1, 1)
self.gap = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Linear(max(1024, base*16), max(1024, base*16), bias=False)
self.bn = nn.BatchNorm1d(max(1024, base*16))
self. 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









