






简介
FS6500/FS4500是专为汽车市场设计的多输出电源集成电路,集成了CAN FD和/或LIN收发器。
(1)设备提供多种开关和线性电压调节器,具备低功耗模式(32微安)和多种唤醒功能,能在宽范围输入电压(低至2.7伏)和输出电流(高达2.2安)下保持高效率。
(2)FS6500/FS4500具备可配置的安全故障/静默安全行为和特性,包括两个安全故障输出,使其成为安全系统分区的完整部分,达到高完整性安全等级(最高ASIL D)。
(3)内置的CAN FD接口符合ISO 11898-2(13)和-5(14)标准,LIN接口符合LIN协议规范2.0、2.1(23)、2.2(24)和SAE J2602-2(25)。
(4)设备具有高达125°C的高温能力,符合AEC-Q100 Grade 1汽车认证标准。
特性
- 电池电压感应和MUX输出引脚
- 高度灵活的SMPS(Switched-Mode Power Supply开关模式电源变压器)预调节器,支持两种拓扑结构:非反相升降压和标准降压
- 一系列设备,用于从1.0 V到5.0 V为MCU核心供电,带有SMPS(0.8 A、1.5 A或2.2 A)或LDO(0.5 A)
- 专用于辅助功能或传感器供电(VCCA跟踪器或独立)的线性稳压器,5.0 V或3.3 V
- 专用于MCU模拟/数字(A/D)参考电压或I/Os供电(VCCA)的线性稳压器,5.0 V或3.3 V
- 在低功耗模式下可用的3.3 V保持活动内存供电
- 长时间计时器,可计数长达6个月,分辨率为1.0秒
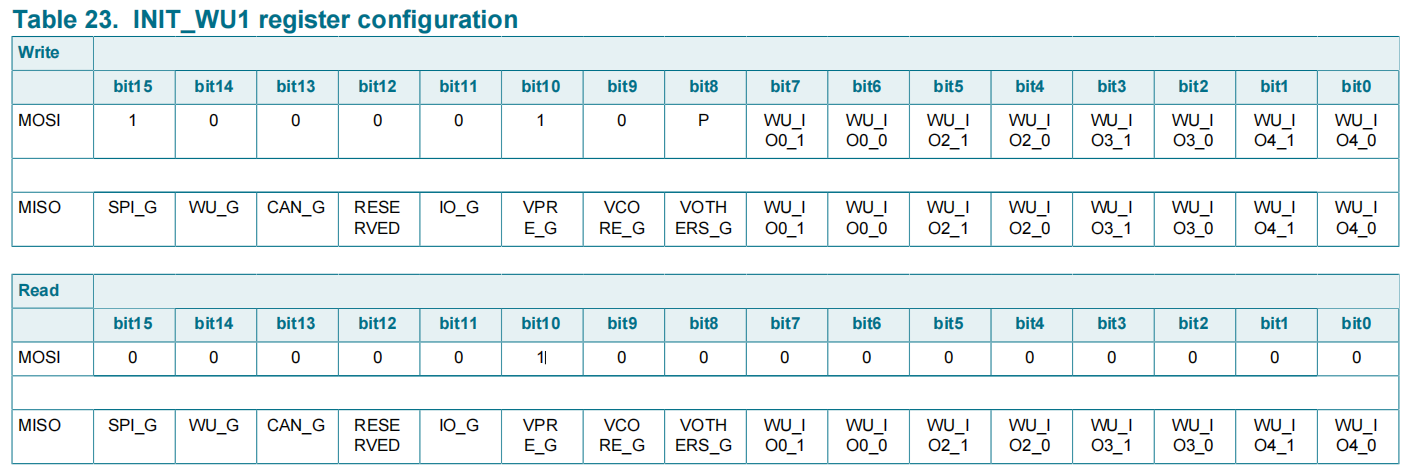
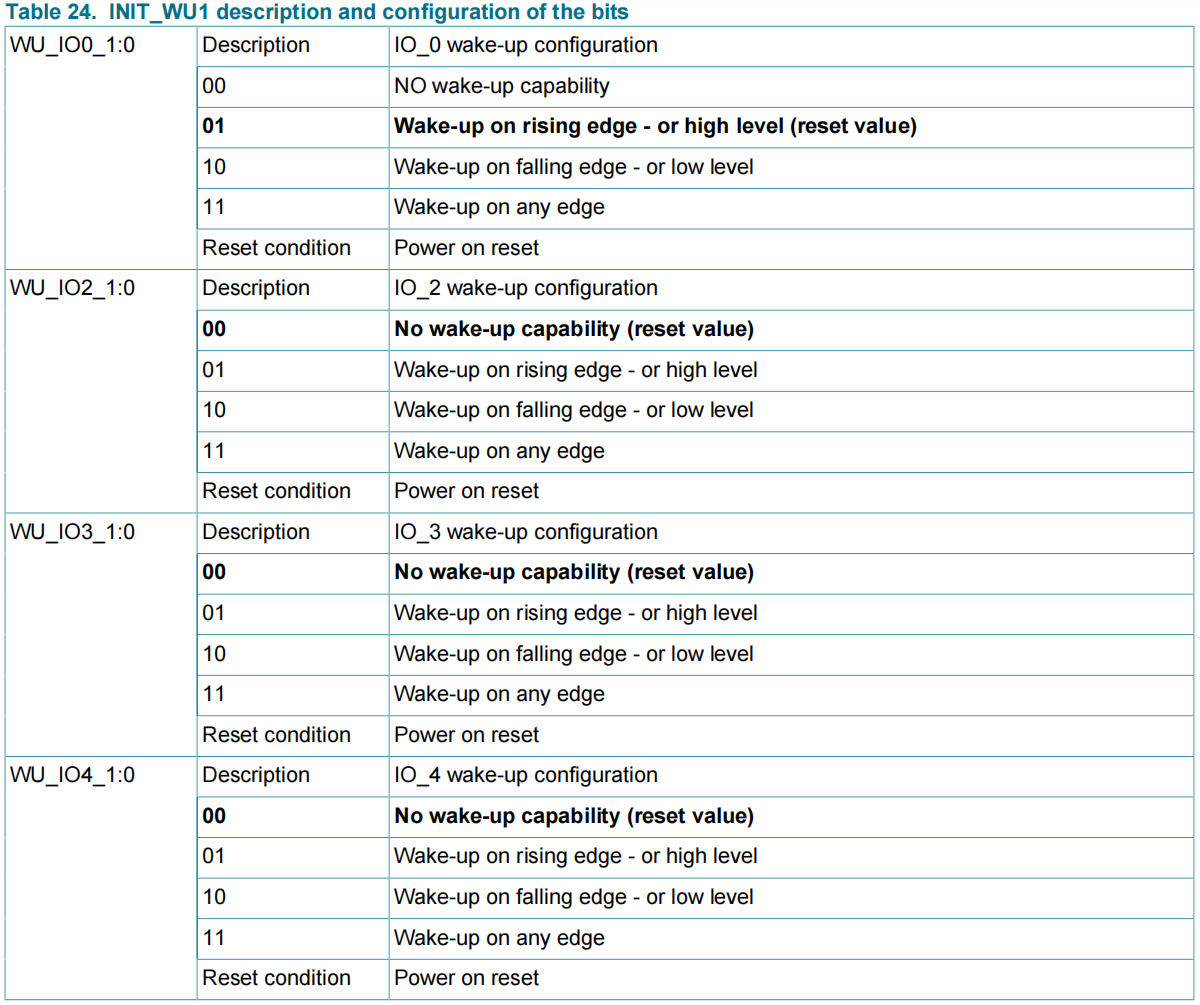
- 在低功耗模式下有多种唤醒源:CAN、LIN、IOs、LDT
- 五个可配置的I/Os
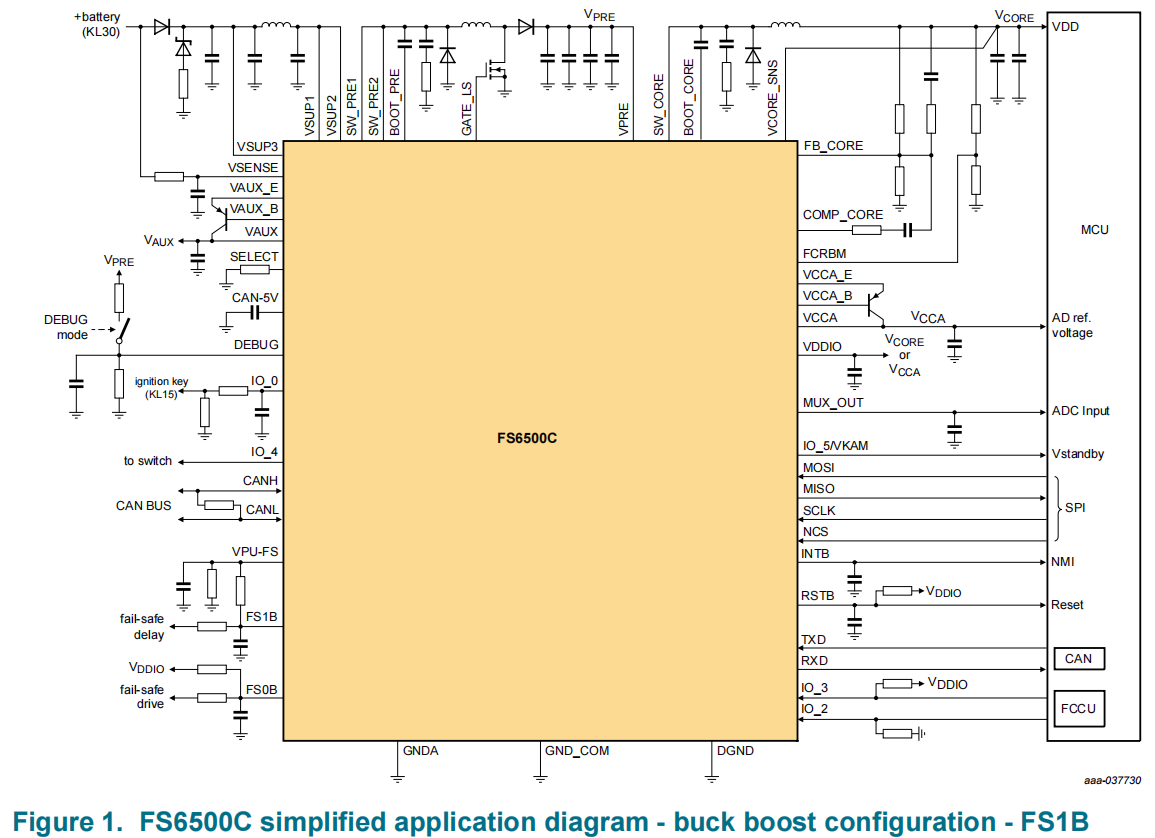
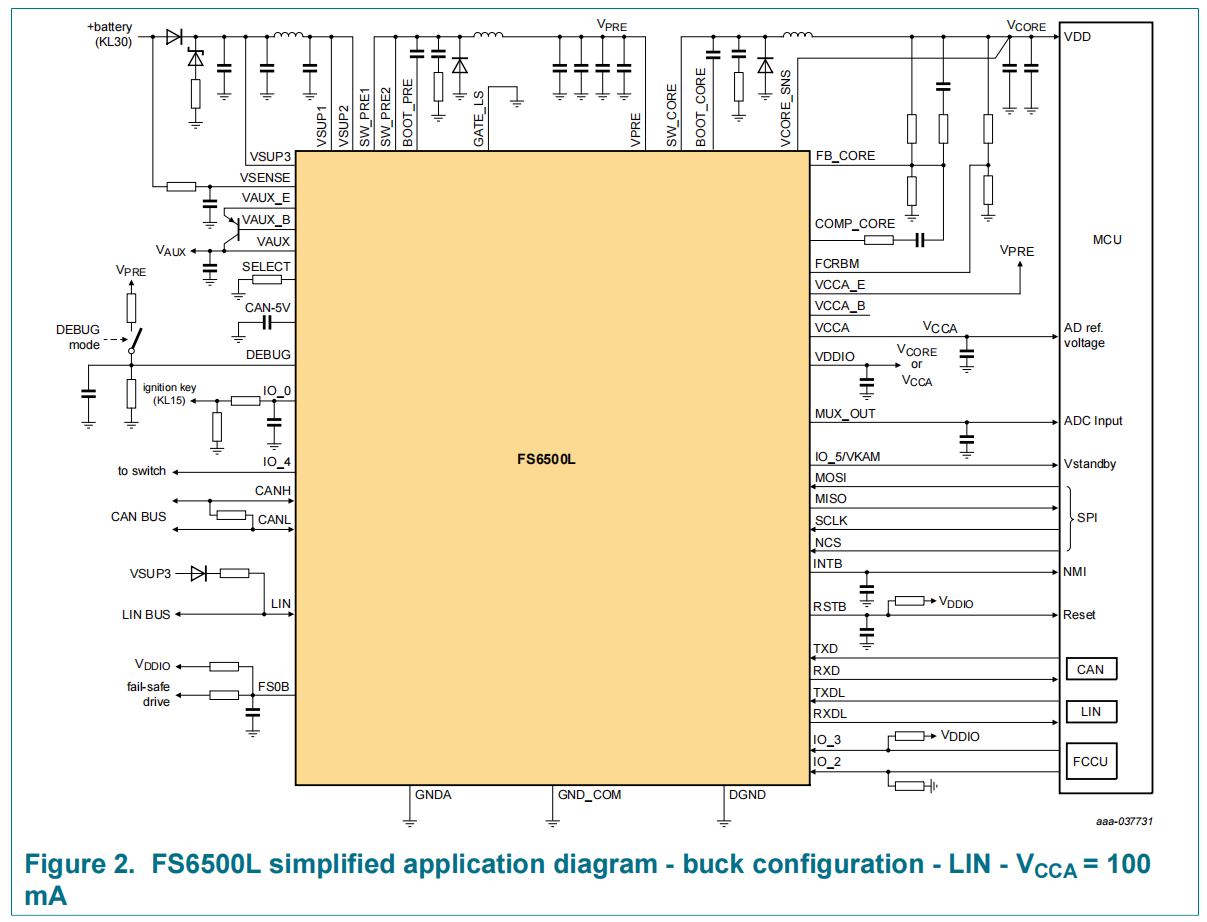
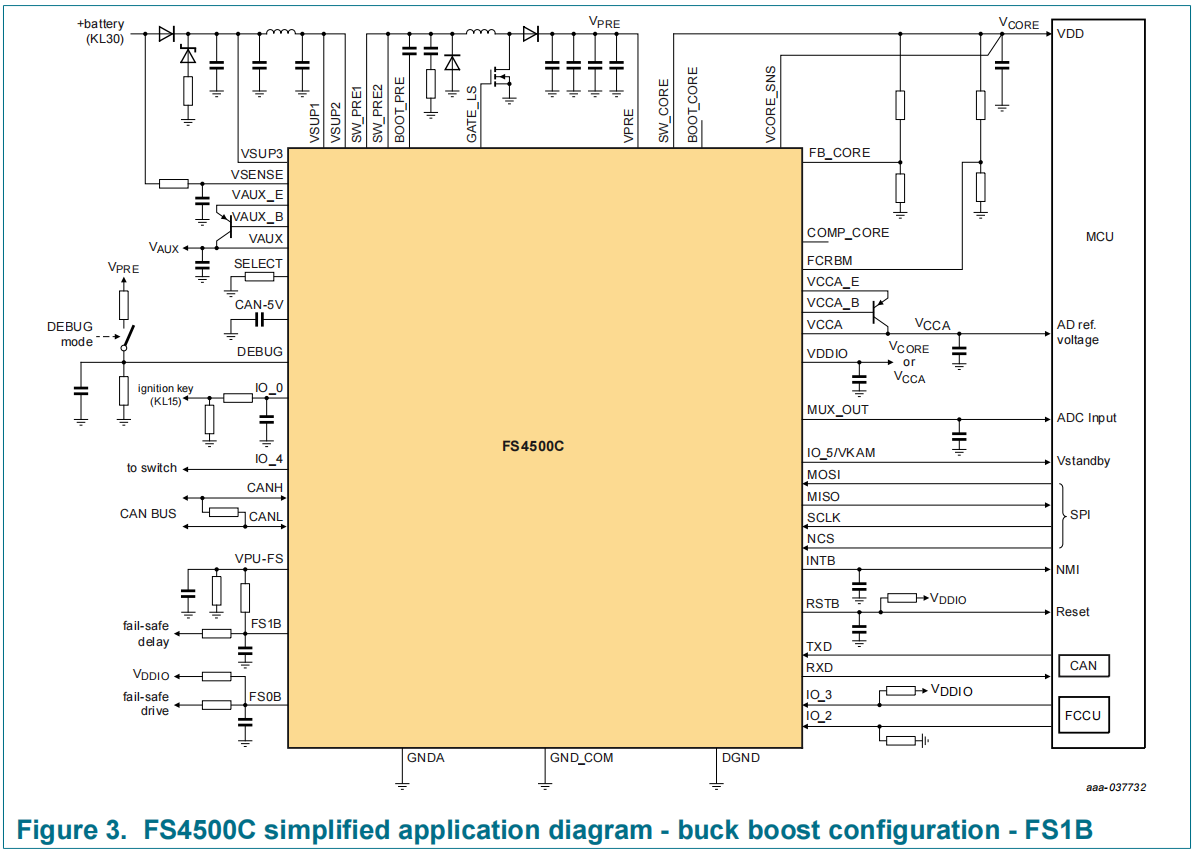
应用框图
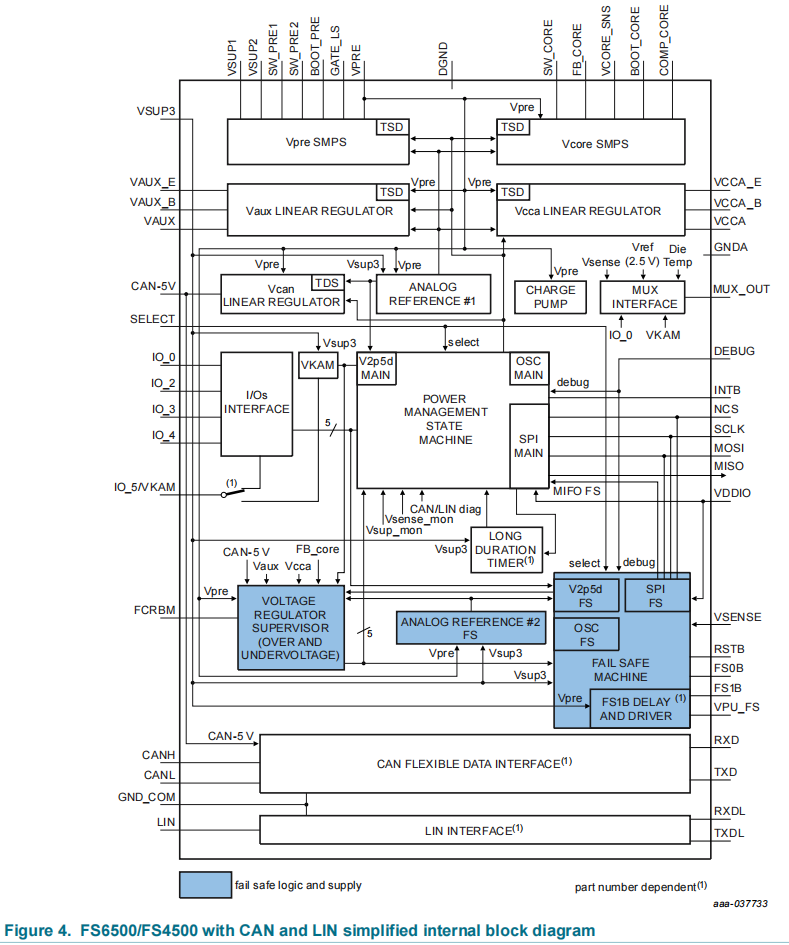
系统框图
芯片命名定义
引脚信息
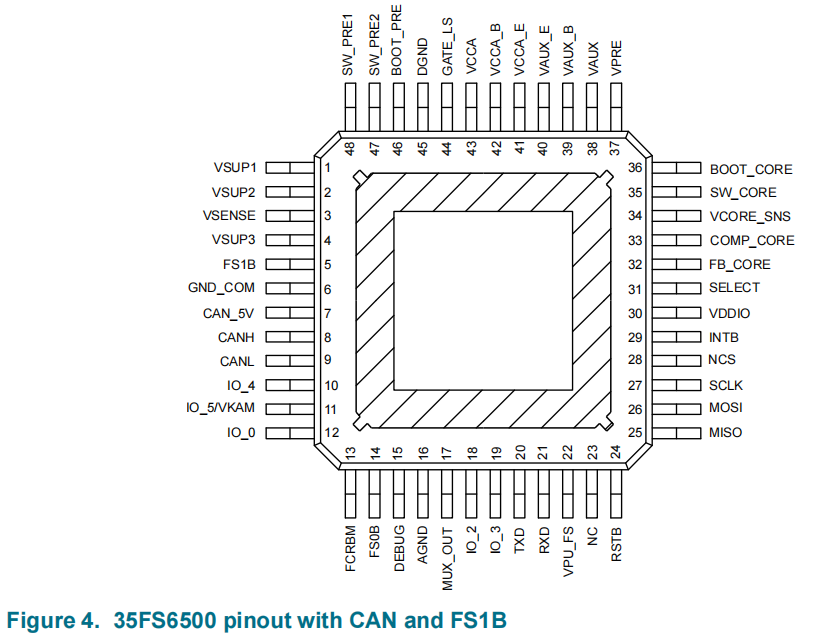
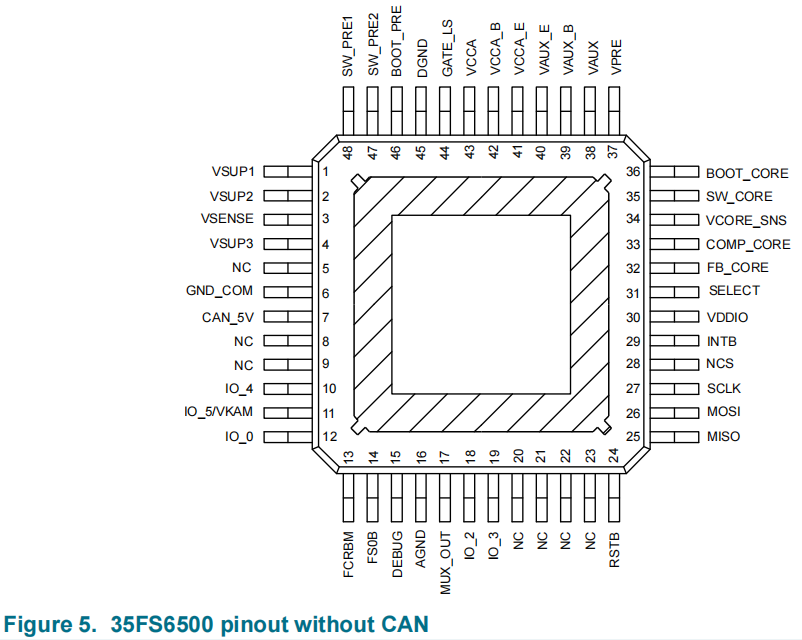
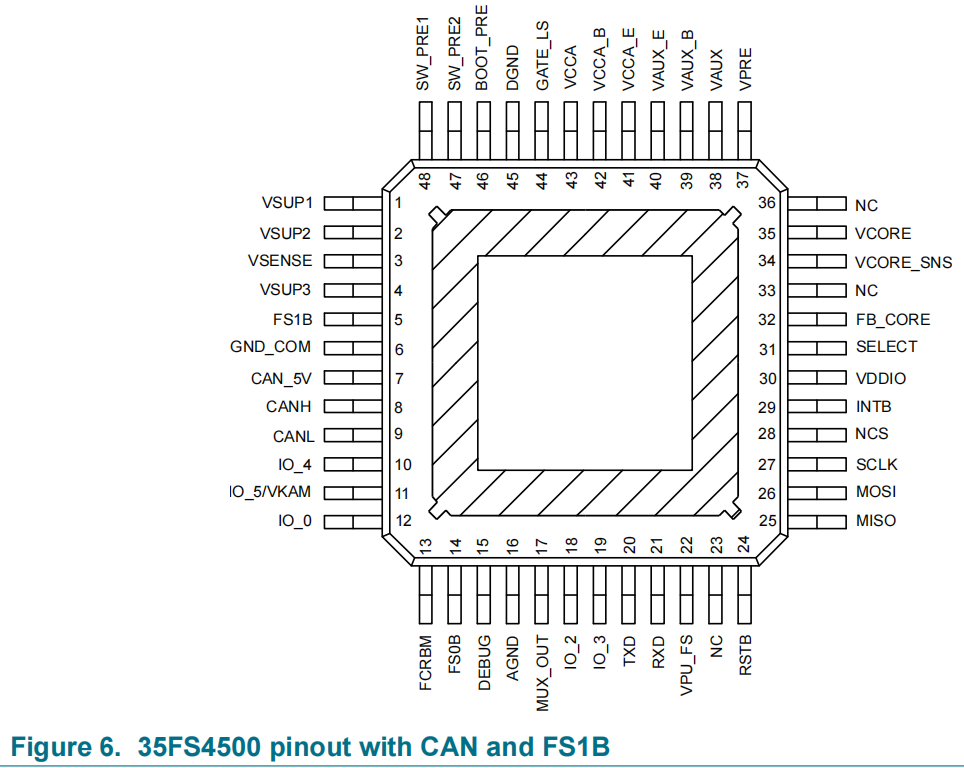
引脚图
引脚描述
| 序号 | 引脚 | 类型 | 定义描述 |
|---|---|---|---|
| 1 | VSUP1 | A_IN | 该设备的电源供应。必须串联二极管外部反向电池保护。 |
| 2 | VSUP2 | A_IN | 二次电源。由VSUP1所使用的外部倒置电池保护二极管进行保护。VSUP1 和VSUP2必须相互连接。 |
| 3 | VSENSE | A_IN | 感应电池电压。必须在反向电池保护二极管之前连接。 |
| 4 | VSUP3 | A_IN | 三次电源,专用于设备电源。由用于VSUP1的外部反向电池保护二极管保护。必须连接在反向保护二极管和输入PI滤波器之间。 |
| 5 | FS1B | D_OUT | 安全块的第二个输出(低电平有效)。该引脚在启动时以及检测到故障条件时被拉低,具有可配置的延迟或持续时间相对于FS0B输出端。开漏结构。 |
| 6 | GND_COM | GROUND | 物理层的专用地。 |
| 7 | CAN_5V | A_OUT | 嵌入式的CAN FD接口的输出电压。 |
| 8 | CANH | A_IN/OUT | CAN 输出高电平。如果未使用CAN功能,此引脚必须保持悬空。 |
| 9 | CANL | A_IN/OUT | CAN输出低电平。如果未使用CAN功能,此引脚必须保持悬空。 |
| 10 | IO_4 | D_IN A_OUT | 可用于数字输入(防负载冲击)并具有唤醒功能,或作为输出栅极驱动器。 **数字输入:**通过SPI可以读取引脚状态。可用于监控来自另一个IC的错误信号,以确保安全(当与IO_5一起使用时)。 **唤醒功能:**可以选择在边缘或电平上唤醒。 **输出栅极驱动器:**可以驱动逻辑低侧的NMOS晶体管。 由SPI控制。 |
| 11 | IO_5/VKAM | A_IN D_IN A_OUT | 可用作具有唤醒功能的数字输入或在低功耗模式下提供保持活动内存供电的模拟输出。 **模拟输入:**通过MUX输出端子可以读取引脚状态。 **数字输入:**通过SPI可以读取引脚状态。可用于监控来自另一个IC的错误信号,用于安全目的(与IO_4一起使用时)。 **唤醒功能:**可选择在边缘或电平上唤醒。 **供电输出:**在低功耗模式下提供保持活动内存供电。 |
| 12 | IO_0 | A_IN D_IN | 可用作模拟或数字输入(负载倾倒保护),具备唤醒功能(可选择)。 **模拟输入:**通过MUX输出端口可以读取引脚状态。 **数字输入:**通过SPI可以读取引脚状态。 **唤醒功能:**可以选择在边缘或电平变化时唤醒。 |
| 13 | FCRBM | A_IN | 反馈核心电阻桥监控:出于安全目的,此引脚用于监控连接在VCORE上的冗余电阻桥的中点(与用于设置VCORE电压的那个并联)。如果不使用,此引脚必须直接连接到FB_CORE。 |
| 14 | FS0B | D_OUT | 安全块的首次输出(低电平有效)。引脚在启动时和检测到故障条件时被置为低电平。开漏结构。 |
| 15 | DEBUG | D_IN | 调试模式输入入口。 |
| 16 | AGND | GROUND | 模拟地连接。 |
| 17 | MUX_OUT | A_OUT | 多路复用输出连接到微控制器ADC。通过SPI在MUX-OUT选择模拟参数。 |
| 18 | IO_2 | D_IN | 具有唤醒功能的数字输入引脚(逻辑电平兼容) **数字输入:**可以通过SPI读取引脚状态。可用于监控MCU的FCCU错误信号,以确保安全。 **唤醒功能:**可以选择在边缘或电平上唤醒。 |
| 19 | IO_3 | D_IN | 具有唤醒功能的数字输入引脚(逻辑电平兼容) **数字输入:**可以通过SPI读取引脚状态。可用于监控MCU的FCCU错误信号,以确保安全。 **唤醒功能:**可以选择在边缘或电平上唤醒。 |
| 20 | TXD | D_IN | 来自微控制器的收发器输入,用于控制CAN总线的状态。 内部上拉至VDDIO。如果未使用CAN功能,此引脚必须保持悬空。 |
| 21 | RXD | D_OUT | 接收器输出,向微控制器报告CAN总线的状态,如果未使用CAN功能,此引脚必须保持悬空。 |
| 22 | VPU_FS | A_OUT | FS1B功能的拉起输出。 |
| 23 | NC | N/A | 未连接。引脚必须保持开放。 |
| 24 | RSTB | D_OUT | 当安全块报告故障时,此输出被断言为低电平。主要功能是重置微控制器单元(MCU)。同时也会监控复位输入电压,以检测外部复位和故障条件。采用开漏结构。 |
| 25 | MISO | D_OUT | SPI总线。主输入从输出。 |
| 26 | MOSI | D_IN | SPI总线。主输出从输入。 |
| 27 | SCLK | D_IN | 串行外设接口总线。串行时钟。 |
| 28 | NCS | D_IN | 非片选(低电平有效)。 |
| 29 | INTB | D_OUT | 当发生中断条件时,这个输出引脚会产生一个低脉冲。 脉冲持续时间是可配置的。内部上拉至VDDIO。 |
| 30 | VDDIO | A_IN | MISO输出缓冲器的输入电压。允许与MCU I/Os的电压兼容性。 |
| 31 | SELECT | D_IN | VAUX和VCCA输出电压的硬件选择引脚。 |
| 32 | FB_CORE | A_IN | VCORE电压反馈。误差放大器的输入。 |
| 33 | COMP_CORE | A_OUT | 网络补偿,误差放大器的输出。适用于FS4500系列。这个插针必须保持打开(NC)。 |
| 34 | VCORE_SNS | A_IN | VCORE输入电压感应。 |
| 35 | SW_CORE/ VCORE | A_OUT | FS6500系列的VCORE输出切换点。 FS4500系列的VCORE输出电压。 |
| 36 | BOOT_CORE | A_IN/OUT | VCORE内部NMOS门驱动的引导电容器。对于FS4500系列,此引脚必须保持开路(NC)。 |
| 37 | VPRE | A_IN | VPRE输入电压的检测。 |
| 38 | VAUX | A_OUT | VAUX输出电压。外部PNP镇流晶体管。集电极连接 |
| 39 | VAUX_B | A_OUT | VAUX电压调节器。外部PNP镇流晶体管。基极连接。 |
| 40 | VAUX_E | A_OUT | VAUX电压调节器。外部PNP镇流晶体管。发射极连接。 |
| 41 | VCCA_E | A_OUT | VCCA电压调节器。外部PNP镇流晶体管。发射极连接。 |
| 42 | VCCA_B | A_OUT | VCCA电压调节器。外部PNP镇流晶体管。基极连接。 |
| 43 | VCCA | A_OUT | VCCA输出电压。外部PNP镇流晶体管。集电极连接。 |
| 44 | GATE_LS | A_OUT | 非反相升降压配置的低压MOSFET栅极驱动。 |
| 45 | DGND | GROUND | 数字接地连接。 |
| 46 | BOOT_PRE | A_IN/OUT | 内部NMOS门驱动的VPRE引导电容器。 |
| 47 | SW_PRE2 | A_OUT | 第二级预调节器输出切换点。 |
| 48 | SW_PRE1 | A_OUT | 初级预调节器输出切换点。 |
状态机
这个设备具有多种操作模式,进入或退出每种模式的转换和条件在功能状态图(图14)中有说明。两个状态机并行工作。主要的状态机负责电源管理(VPRE、VCORE、VCCA、VAUX等),而故障安全状态机则负责所有安全方面的控制(WD、RSTB、FS0B、FS1B等)。
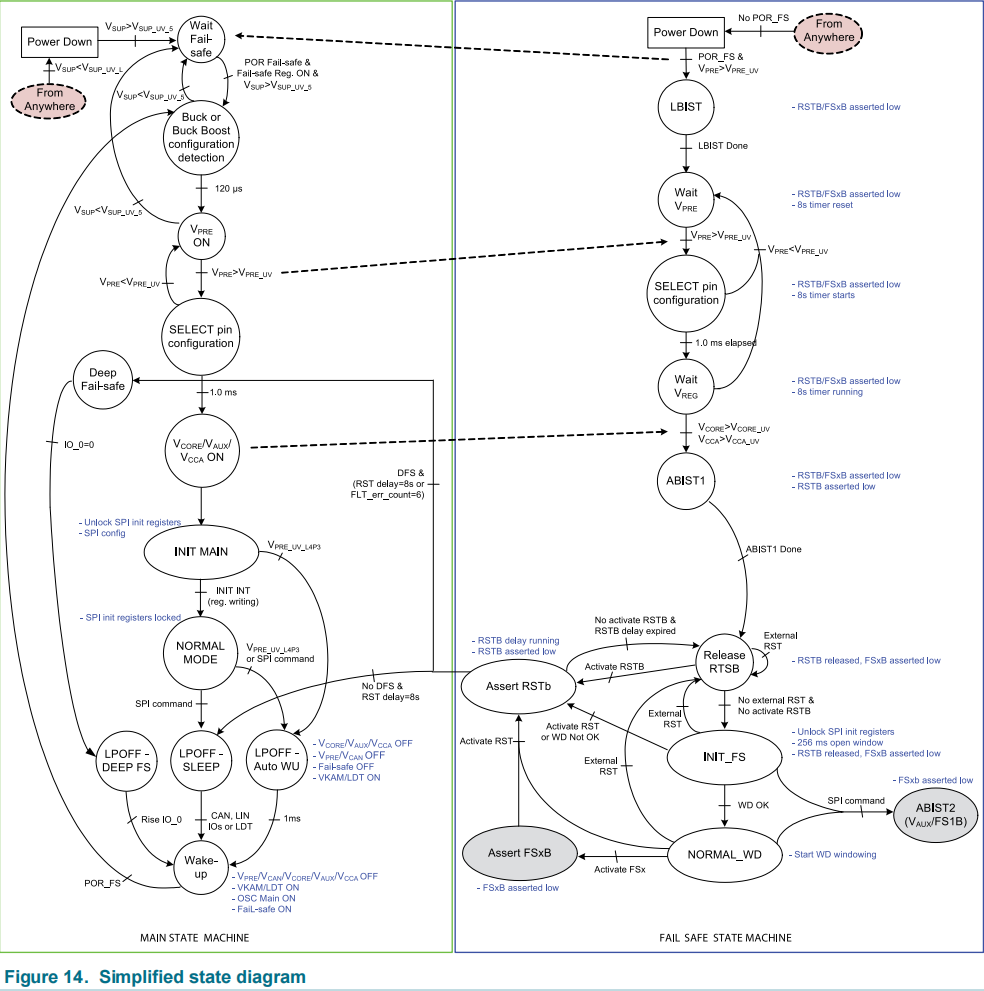
主状态机的模式和状态描述
Normal
在此模式下,所有设备功能都可用。此模式通过在初始化阶段向INIT_INT寄存器写入SPI命令来进入。在正常模式下,可以使用安全的SPI命令将设备设置为低功耗模式(LPOFF)。
Low-power mode off
主状态机有三种LPOFF模式,每种模式进入和退出的条件各不相同,如下所述。从LPOFF唤醒后,默认启用所有调节器。在LPOFF模式下,除了VKAM之外的所有调节器都会关闭。寄存器配置和ISO脉冲要求适用于三种LPOFF模式。
LPOFF - sleep
当设备处于正常模式时,通过发送一个安全的SPI命令,才能进入低功耗模式LPOFF - 睡眠状态。在这种模式下,所有的调节器都会关闭,与VCORE调节器相连的MCU将不再供电。如果使用VKAM(默认开启的特定部分),则只有VKAM可用。
一旦35FS4500/35FS6500进入LPOFF - 睡眠状态,设备将监控外部事件以唤醒并离开低功耗模式。唤醒事件可以发生,并且根据设备配置,可能来自:
• CAN物理层
• I/O输入
• 定时器
当检测到唤醒事件时,设备将通过检测VPRE配置(降压或降压-升压)重新启动主状态机,唤醒源将报告到专用的SPI寄存器,并且安全状态机也将重新启动。
LPOFF - auto WU
LPOFF - auto WU,当设备处于初始化或正常模式,并且如果VPRE电压水平超过VPRE_UV_L_4P3阈值(典型值4.3V)时,会自动进入此模式。如果设备处于正常模式,也可以通过发送一个安全的SPI命令进入此模式。它允许一次电源开启(POR)和完全重启故障安全状态机。在1.0毫秒后,设备尝试通过再次打开VPRE来恢复。
LPOFF - deep FS
LPOFF - 当设备处于深度故障安全模式且如果IO是关闭的(IO_0为低电平)时,会进入深度FS模式。要退出此模式,需要将IO_0切换到高电平。IO_0通常连接到关闭键的信号。
Register configuration in LPOFF
在LPOFF模式下,由于内部2.5V主数字调节器可用于唤醒操作,因此保留了主状态机的寄存器设置。然后,由于2.5V的备用数字调节器在LPOFF状态下不可用,备用状态机的寄存器设置被擦除。因此,在唤醒事件之后,必须在初始化阶段(256毫秒的开放窗口期间)再次配置备用寄存器。
故障安全状态机的模式和状态描述
LBIST
在安全机制机器中,内置的逻辑自检测试(LBIST)在启动时验证FSSM的正确功能。安全状态机被完全检查。如果报告了问题,SAFE输出引脚FS0B和FS1B保持低电平,并报告一个标志,RSTB引脚被释放以允许微控制器(MCU)进行诊断。LBIST在启动时以及设备处于LPOFF模式下的每次唤醒事件后运行。
LBIST失败不会阻止RSTB引脚的释放,但会阻止FS0B和FS1B引脚的释放。它允许MCU诊断,同时保持应用程序处于安全状态。
ABIST
在安全机制机器中,模拟内置自测试(ABIST)验证设备的模拟部分的正确功能,例如电压监控器的过压和欠压检测以及安全机制输出反馈。ABIST故障不会阻止RSTB引脚的释放,但会阻止FS0B和FS1B引脚的释放。它允许MCU诊断,保持应用程序处于安全状态。
Release RSTB
在这种状态下,设备释放了RSTB引脚。
INIT_FS
此模式在设备上电后自动进入,并且在执行了内置自检(逻辑LBIST和模拟ABIST1)后开始。一旦RSTB被释放,INIT_FS模式就会启动。
在这种模式下,设备可以通过SPI在最多256毫秒内进行配置,包括第一次看门狗刷新。一些寄存器只能在这种模式下配置,并且在退出INIT_FS模式时会被锁定。建议在发送第一次WD刷新之前先配置设备。当微控制器(MCU)发送了看门狗刷新信号,设备离开此模式并进入正常WD模式。
Normal WD
在这种模式下,在特定配置的时间窗口内,设备等待来自微控制器(MCU)的周期性看门狗刷新信号。看门狗窗口周期的配置可以在初始化文件系统(INIT_FS)阶段或在此模式下设置。如果发生导致RSTB激活的故障(包括外部复位请求),则退出此模式。
Assert RSTB
当设备将复位引脚置为低电平时,会运行一个延迟,以释放RSTB,前提是不存在故障。复位低电平持续时间可以通过SPI在INIT_FSSM寄存器中配置,该寄存器仅在INIT_FS阶段可写入。
Assert FSxB and ABIST2
这些功能与INIT_FS或故障安全状态机的正常WD状态并行执行。
看门狗
看门狗介绍
在35FS4500/35FS6500中实现了基于问答原则的窗口式看门狗。看门狗必须在开放的看门狗窗口期间由微控制器持续触发,否则将产生错误。错误处理和看门狗操作由故障安全状态机管理。为了调试目的,通过在启动时在DEBUG引脚上设置正确的电压,可以禁用此功能。
监视窗口持续时间在INIT_FS阶段或正常模式下可以通过SPI选择。以下值是可用的:: 1.0 ms, 2.0 ms, 3.0 ms, 4.0 ms, 6.0 ms, 8.0 ms, 12 ms, 16.0 ms, 24 ms, 32 ms, 64 ms, 128 ms, 256 ms, 512 ms, 1024 ms。监控器也可以在INIT_FS阶段通过SPI寄存器被禁用,以允许重新编程(即通过车辆级别的CAN)。
通过在35FS4500/35FS6500上实现线性反馈移位寄存器,生成了一个8位伪随机字。微控制器可以发送LFSR的种子,或者在初始化阶段使用35FS4500/35FS6500生成的LFSR,并执行预定义的计算。结果通过SPI在打开的看门狗窗口期间发送,并由35FS4500/35FS6500进行验证。当结果正确时,会生成一个新的LFSR,并重新启动看门狗窗口。当结果错误时,看门狗错误计数器会增加,看门狗窗口会重新启动,产生一个INTB信号,且LFSR值不会改变。在关闭的看门狗窗口期间对WD寄存器的任何访问都被视为错误的WD刷新。
第一次看门狗刷新
开机时,当RSTB被释放为高电平(大约在16.5毫秒后),初始化(INIT)阶段开始,最长持续256毫秒,这被视为完全开放的看门狗窗口。在这个初始化阶段,微控制器(MCU)发送线性反馈移位寄存器(LFSR)的种子,或者使用35FS4500/35FS6500生成的默认LFSR值(B2h),该值可在WD_LFSR寄存器中找到。使用这个LFSR,微控制器根据以下公式执行一个简单的计算。例如,基于LFSR默认值(B2h)的这个计算结果是4Dh。
微控制器将结果发送到WD_ANSWER寄存器。当在开放窗口期间正确刷新看门狗时,256毫秒的开放窗口将停止,初始化阶段完成。一个新的LFSR生成并可在WD_LFSR寄存器中使用。如果看门狗刷新错误,或者在256毫秒的开放窗口(INIT_FS阶段)期间没有刷新看门狗,设备将断言RSTB,FS0B,并且故障错误计数器将增加1。
在一次良好的看门狗刷新之后,设备进入正常看门狗刷新模式,在该模式下,开放和关闭窗口由初始化阶段在WD_WINDOW寄存器中所做的配置定义,或者由该寄存器中已存在的默认值(3.0毫秒)定义。
正常看门狗刷新
看门狗必须在配置在WD_ANSWER寄存器中的窗口周期的每个打开的窗口期间刷新。任何WD刷新都会重置窗口。这确保了微控制器(MCU)与35FS4500/35FS6500之间的同步。
窗口的持续时间可以通过SPI选择,没有访问限制,意味着可以在初始化阶段或正常模式下更改窗口持续时间。在正常操作中进行更改允许系统集成商能够动态配置监控狗窗口持续时间:
• 当在WD_ANSWER寄存器中发生写入(好的或坏的WD响应)或当之前的WD窗口在没有任何写入的情况下结束(WD超时)时,会考虑新的WD窗口持续时间(除了在禁用后)
• 当SPI命令被验证时,会考虑在禁用后的新WD窗口持续时间
窗口的占空比设置为50% ± 10%,并且不可修改。
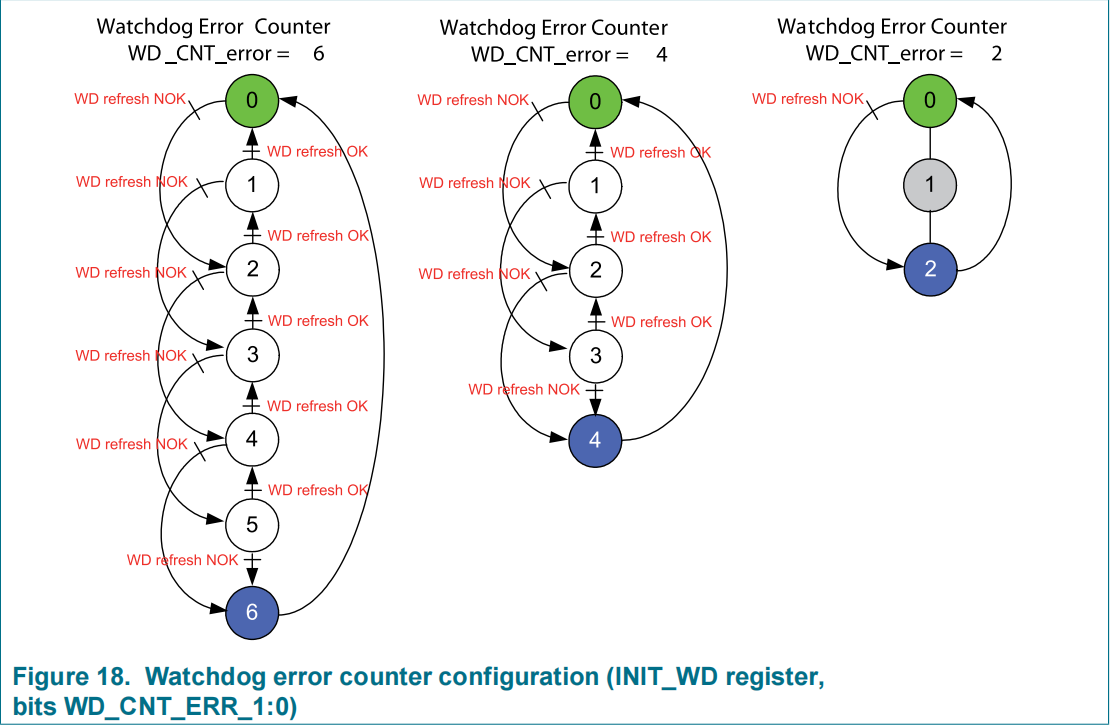
看门狗故障计数
看门狗错误计数器在设备中实现,用于过滤错误的看门狗刷新。每次发生看门狗故障时,设备将此计数器增加2。每次看门狗被正确刷新时,WD错误计数器减1。这一原则确保了循环的“OK/NOK”行为会收敛到故障检测。
为了允许在应用程序中具有灵活性,此计数器的最大值可以在INIT_WD寄存器中配置,但仅当设备处于INIT_FS模式时。
输入电压范围
由于预调节器的灵活性,该设备可以覆盖广泛的电池输入电压范围。然而,仅使用降压配置仍然可以覆盖更标准的电压范围。
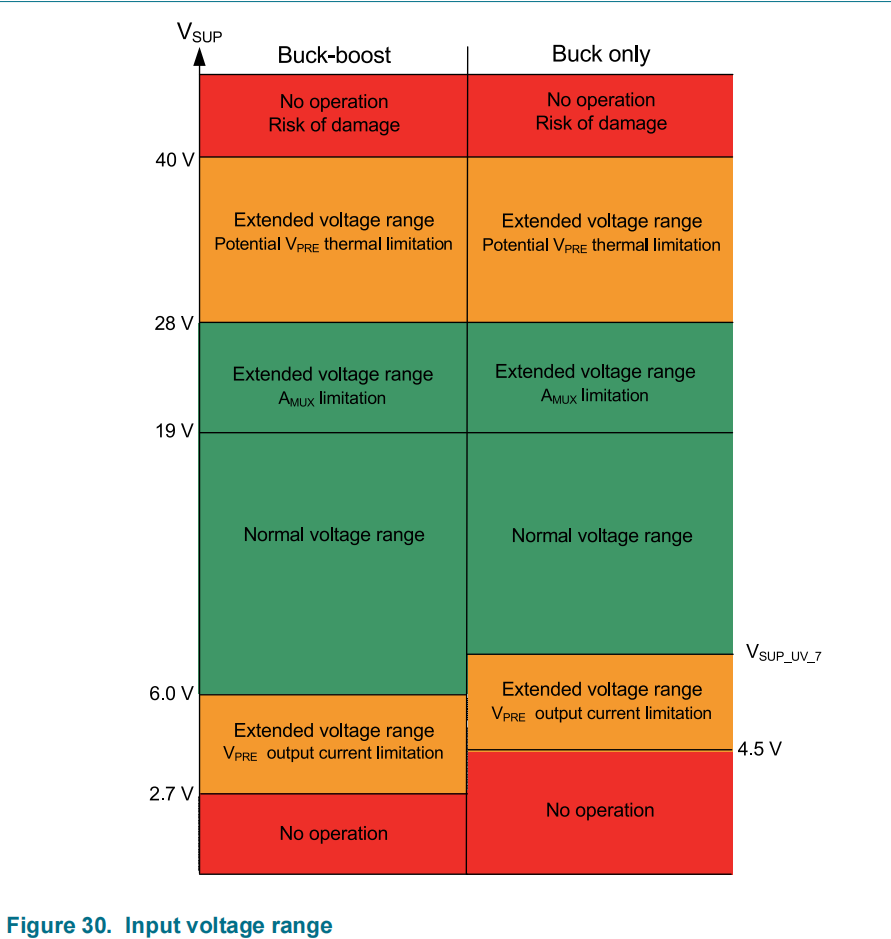
• VSUP > 28 V: 可能存在VPRE热限制
RDS(on)、电流限制和过流检测是针对VSUP < 28 V指定的。
• VSUP > 19 V: Mux_out限制
VSENSE和IO_0的最大模拟输入电压范围为19 V。内部2.5 V参考电压精度降低。
• 仅限降压转换器,VSUP < VSUP_UV_7:
当VSUP > 6.0 V时,保证CAN通信。对于VCCA和VAUX 5.0 V配置,低VSUP时会触发欠压(参见VCCA_UV_5和VAUX_UV_5)。
电源管理操作
VPRE电压预调节器
在35FS4500/35FS6500中实现了一个高度灵活的SMPS预调节器。根据输入电压的要求,该设备可以配置为非反相升降压转换器或标准降压转换器。需要一个外部逻辑级MOSFET(N型)来在非反相升降压转换器模式下运行。外部MOSFET的连接在启动阶段自动检测。
无论在何种配置下,转换器都以电流控制模式运行。集成了高侧开关MOSFET以简化电流控制。PWM频率固定在典型的440 kHz。补偿网络完全集成。VPRE输出电压在6.0 V和7.0 V之间调节。
如果VCORE、VCCA、VAUX和CAN_5V没有使用全部电流能力,可以将一个额外的外部LDO连接到VPRE以满足应用需求,同时在所有条件下电流负载保持在最大电流能力以下。
VCORE DC–DC转换器
35FS6500电压调节器是一个降压型DC-DC转换器,工作在电压控制模式下。连接到VPRE的高侧开关MOSFET集成在设备中,PWM频率固定在2.4 MHz(典型值)。输出电压可以从1.0 V到5.0 V的范围内配置,并且可以通过连接在VCORE和反馈引脚(FB_CORE)之间的外部电阻分压器(R3/R4)进行调整(见图42)。VCORE = VCORE_FB × ((R3 + R4)/R4)。
电压精度为±2.0%(不包括外部电阻桥R3/R4的精度),最大输出电流为1.5 A。整个转换器的稳定性通过连接到COMP_CORE引脚的外部补偿网络(R1/C1/R2/C2)来实现。建议使用1.0%精度的电阻,并设置R4 = 8.06 kΩ,通过调整R3来获得MCU核心供电所需的最终VCORE电压。
VCCA电压调节器
VCCA是一个线性电压调节器,主要用于为MCU的I/O端口供电,特别是ADC。输出电压可以选择为5.0V或3.3V。由于这个输出电压可以用来为MCU的I/O端口供电,因此输出电压的选择是通过外部进行的,电阻连接到SELECT引脚和地或VPRE。当使用内部MOS晶体管时,VCCA_E引脚必须连接到VPRE。对于5.0 V配置,电压精度为±1.0%,对于3.3 V配置,电压精度为±1.5%,输出电流能力为100 mA。
当使用外部PNP晶体管与VCCA一起使用以提高电流能力至300 mA时,35FS4500/35FS6500的启动序列会自动检测连接。在这种情况下,内部通过晶体管被关闭,所有电流通过外部PNP驱动以减少内部功耗。使用外部PNP时,输出电压精度在300 mA电流负载下降低到±3.0%。当VAUX配置为跟踪调节器时,VCCA输出电压用作辅助电压供应(VAUX)的参考。
VAUX电压调节器
VAUX 是一款高度灵活的线性电压调节器,可以作为ECU中附加设备的专用辅助电源,或者作为传感器电源(即在ECU外部)。必须使用外部PNP晶体管(没有内部电流能力)。
如果在应用中不使用VAUX,VAUX、VAUX_E和VAUX_B引脚必须保持开路。建议通过SPI关闭VAUX驱动器并禁用VAUX安全影响(在REG_MODE寄存器中设置VAUX_EN=0,并将INIT_VAUX_OVUV_IMPACT寄存器的所有位设置为0)。
如果VAUX用作辅助电源,输出电压可以在5.0V和3.3V之间选择。由于这个电压轨可以用来供应MCU IOs,选择是通过将一个外部电阻连接在SELECT引脚和地或VPRE之间来完成的。在这种情况下,电压精度为±3.0%,最大输出电流能力为400 mA。
CAN_5V电压调节器
CAN_5V电压调节器是专为内部CAN接口设计的线性调节器。默认情况下,CAN_5V调节器和欠压检测器是启用的,而过压检测器是禁用的。在INIT_MAIN状态下,SPI可以启用过压检测器。
如果启用了过压检测器,当检测到过压时,CAN_5V调节器会关闭。当调节器关闭时,会报告欠压并禁用欠压检测器。在专用寄存器中报告诊断,生成中断。CAN_5V调节器不是安全调节器。因此,CAN_5V电压监控(过压,欠压)永远不会断言RSTB或FS0B安全引脚。
如果在应用中不使用35FS4500/35FS6500内部CAN FD收发器,CAN_5V调节器可以用来为外部独立的CAN或FLEX–RAY收发器供电,前提是电流负载在所有条件下都保持在最大电流能力以下。在这种情况下,内部CAN FD收发器必须置于无唤醒功能的睡眠模式。
VKAM
保持内存供电与IO_5引脚共享。当使用VKAM时,IO_5不可用,反之亦然。VKAM可以默认开启或关闭。
• 如果VKAM默认开启,当VSUP3大于4.5V时,VKAM立即启动。VKAM仍然可以通过SPI关闭/开启。
• 如果VKAM默认关闭,VKAM的开启/关闭由SPI控制。
VKAM是在低功耗模式(LPOFF)下唯一可用的电源。VKAM可用于为MCU静态RAM或其他不超过其电流能力的外部IC供电。已经实施了电流限制。没有实现电压监控或热关断。VKAM可以在MUX_OUT引脚上被选中,以便MCU ADC进行监测。当设备处于正常模式时,VKAM供电可降至VSUP = VSUP_UV_L = 2.7 V,当设备处于低功耗模式关闭时,VKAM供电可降至VSUP = 4.5 V。
长时程定时器(LDT-LONG_DURATION_TIMER)
该设备包括一个长时间定时器,内置振荡器。通过SPI配置定时器,它可以正常模式和低功耗模式下运行。它提供了多种功能,并提供了一个广泛的计数周期范围,以及一个校准机制,用于内部振荡器补偿。
定时器不属于安全电路的一部分,也不受LBIST(内置逻辑自测试)的覆盖。然而,它可以在正常模式下激活,并且可以选择所有预分频器选项,以允许定时器电路验证。定时器基于一个24位计数器,带有一个32768赫兹的振荡器,允许1.0秒的时间基准。
计时器特性
在正常操作中,计时器可以计数至194天,分辨率为1秒。在校准模式下,旁路预分频器2,计时器可以计数至2.28小时,分辨率为488微秒。校准原理是激活计数器进行一个特定且精确的持续时间,这是由于微控制器(MCU)的精确时钟和计时功能。然后微控制器读取计时器的计数值,将计数值与激活的准确时间进行比较,然后计算出一个时间偏差。建议在校准温度范围为-20°C至+85°C之间进行。

计时器运行

• 当选择功能1并且计数器达到过运行值(EOT)时,会产生一个中断,计数器停止。在读取计数器的值之前必须先禁用计数器(~ENABLE),然后再重新启用。
• 当选择功能2并且计数器达到过运行值(EOT)时,设备进入LPOFF模式,计数器停止。在读取计数器的值之前必须先禁用计数器(~ENABLE),然后再重新启用。
• 当选择功能3并且计数器达到过运行值(EOT)时,设备进入LPOFF模式。计数器重置并重新开始计数。当计数器达到唤醒值(EOT)时,设备唤醒,计数器停止。在读取计数器的值之前必须先禁用计数器(~ENABLE),然后再重新启用。
• 当选择功能4并且计数器达到唤醒值(EOT)时,设备唤醒,计数器停止。在读取计数器的值之前必须先禁用计数器(~ENABLE),然后再重新启用。
• 当选择功能5并且计数器溢出(OVRFLW)时,设备唤醒,计数器停止。在读取计数器的值之前必须先禁用计数器(~ENABLE),然后再重新启用。溢出意味着计数器达到最大值(所有24位均为"1")。
• 当选择功能5并且设备通过CAN或IO唤醒时,计数器正在运行。在读取计数器的值之前必须先禁用计数器(~ENABLE),然后再重新启用。
CAN收发器
正常模式
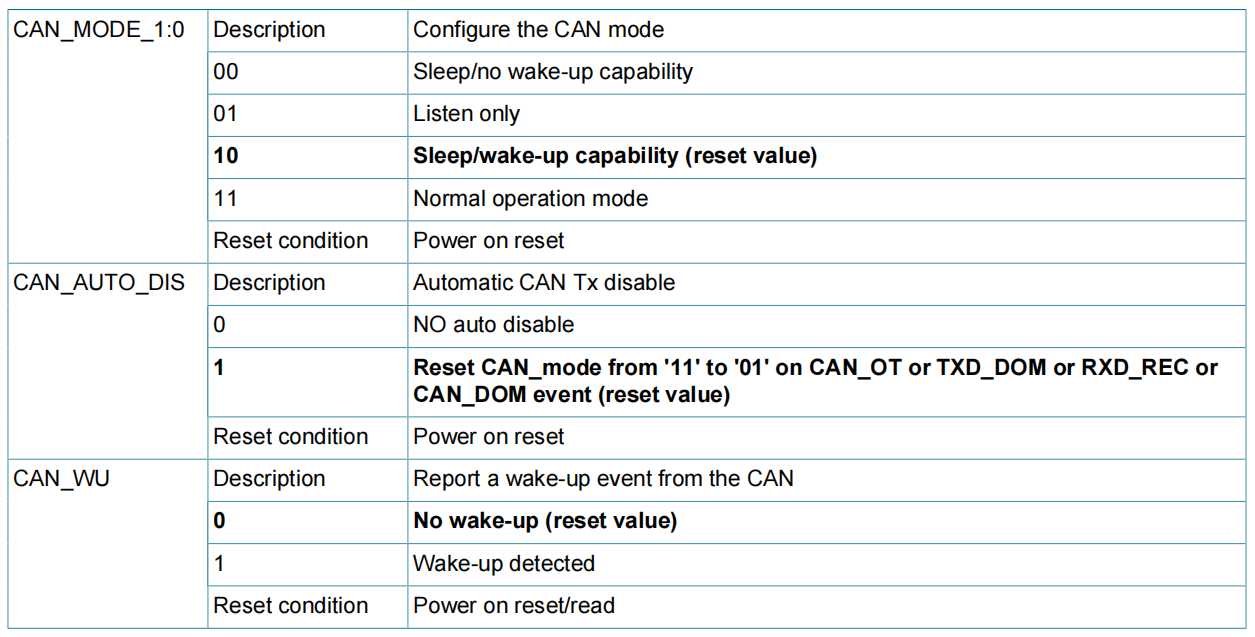
当CAN模式位配置为’11’(CAN处于正常操作模式)时,设备能够将信息从TXD传输到总线,并将总线电平报告给RXD引脚。当TXD为高电平时,CANH和CANL驱动器关闭,总线处于隐性状态(除非在另一个设备驱动总线到显性状态的应用中)。当TXD为低电平时,CANH和CANL驱动器打开,总线处于显性状态。当CAN模式位配置为’01’(CAN处于仅监听模式)时,设备仅能够将总线电平报告给RXD引脚。TXD驱动器关闭,设备无法将信息从TXD传输到总线。TXD通过连接到VDDIO的内部上拉电阻TXDPULL-UP保持高电平。
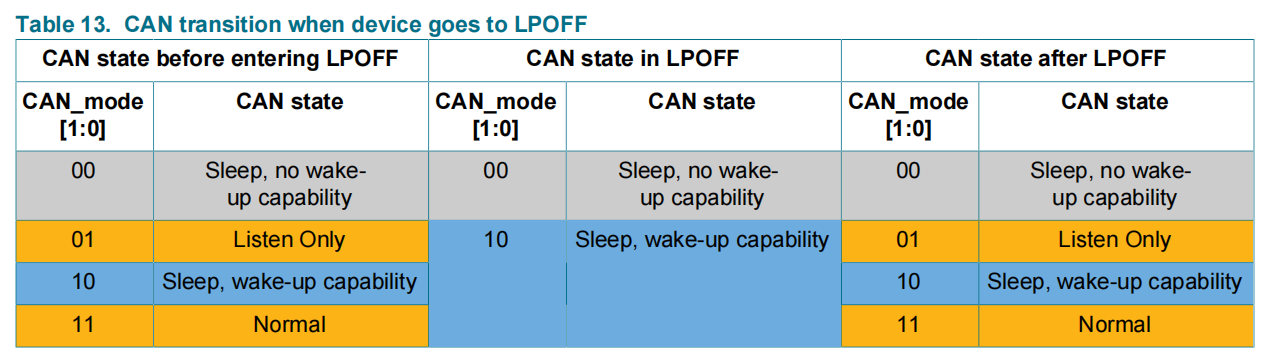
睡眠模式
当设备处于LPOFF模式时,CAN收发器会根据CAN模式位配置自动设置为睡眠模式,无论是否具备唤醒能力。在这种情况下,CANH和CANL引脚通过内部RIN电阻被拉至GND,TXD和RXD引脚被拉至GND,驱动器和接收器均关闭。如果设备进入LPOFF时未配置为无唤醒能力的睡眠模式,则CAN模式会自动更改为具有唤醒能力的睡眠模式。退出LPOFF后,会恢复进入LPOFF之前的初始CAN模式(见表13)。
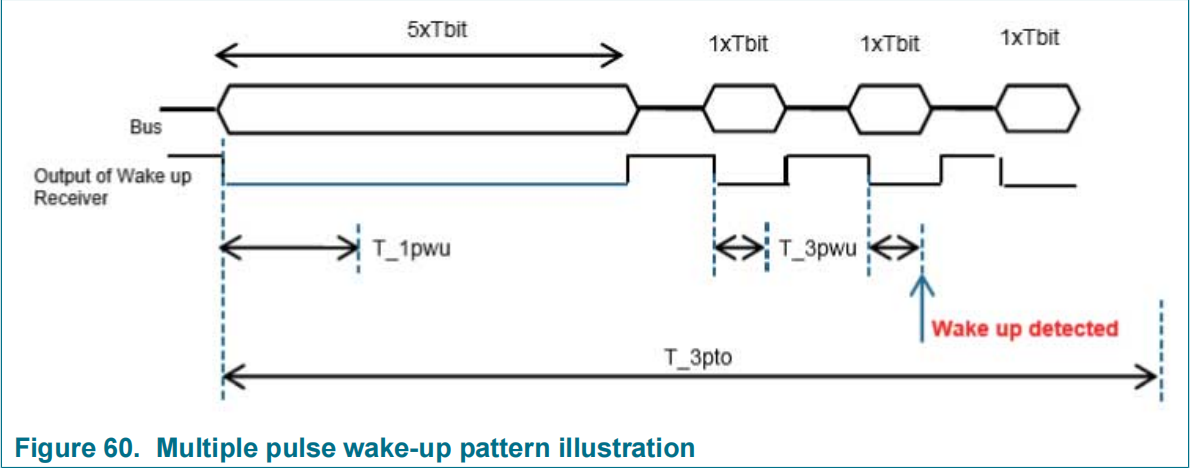
唤醒机制
要激活唤醒报告,在CAN总线上必须发生三个事件:
事件1:一个持续时间超过t1PWU的占优电平,接着是
事件2:一个持续时间超过t3PWU的占优电平,接着是
事件3:一个持续时间超过t3PWU的占优电平
这三个事件和超时功能可以防止总线上出现永久占优状态,从而产生永久唤醒情况,这会阻止系统进入低功耗模式。
SPI接口
简介
该设备使用16位SPI,其配置如下:
MOSI,主输出从输入位:
• 第15位读/写
• 第14位主要或备用寄存器目标
• 第13至9位(A4至A0)用于选择寄存器地址。
• 第8位在写模式下是奇偶校验位,在读模式下是下一个位(=0)。
• 第7至0位(D7至D0):控制位
MISO,主输入从输出位:
• 第15至8位(S15至S8)是设备状态位。
• 位7到0(Do7到Do0)要么是扩展的设备状态位,设备内部控制寄存器内容,要么是设备标志。
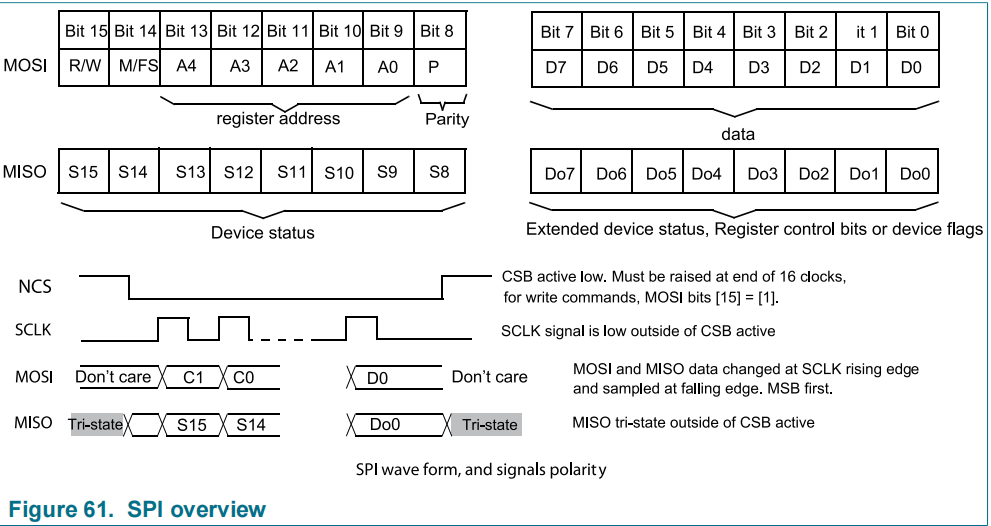
SPI命令格式
SPI的命令格式如下图所示,MOSI及MISO的16bit的数据帧格式的每一位按照下图所示的格式排列。

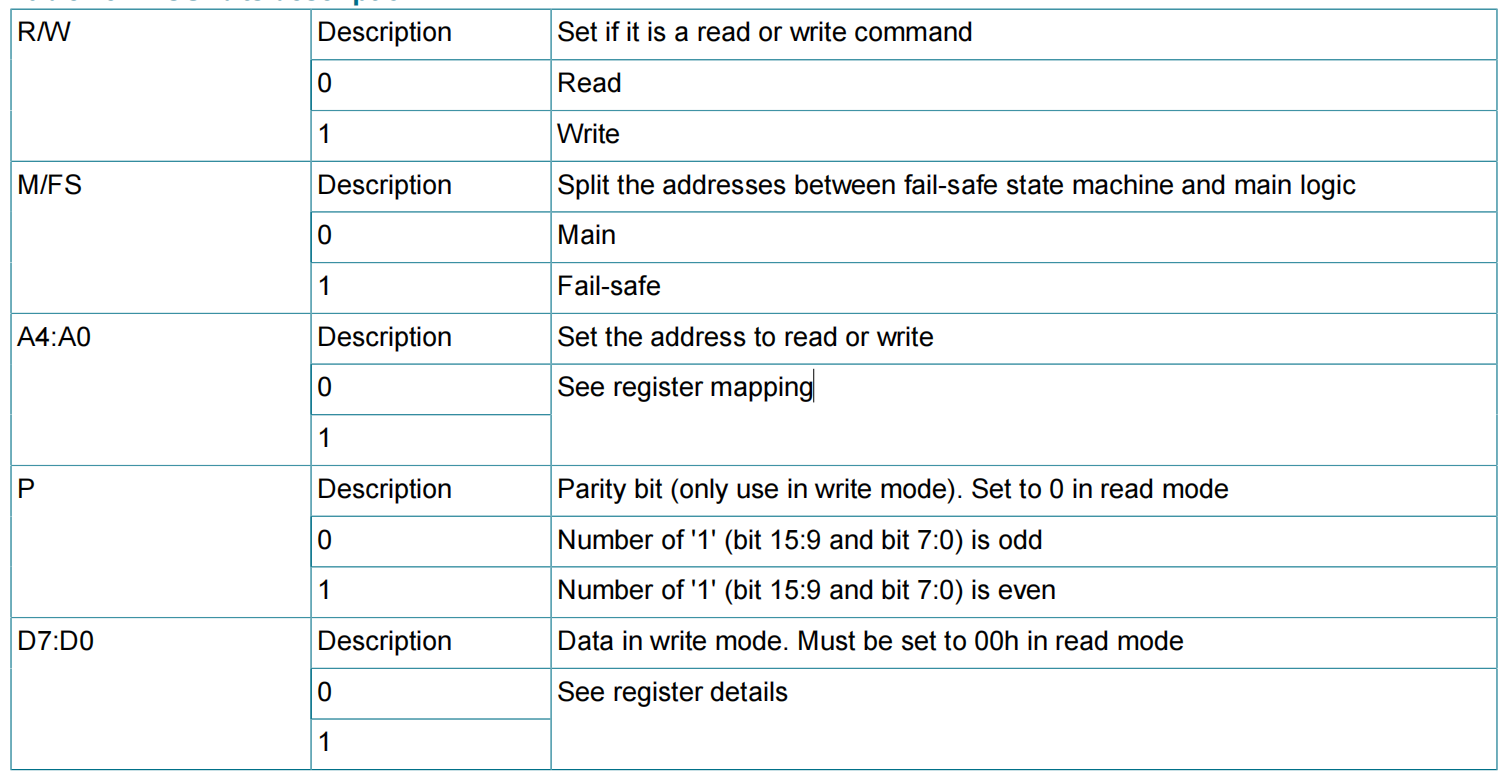
MOSI位描述
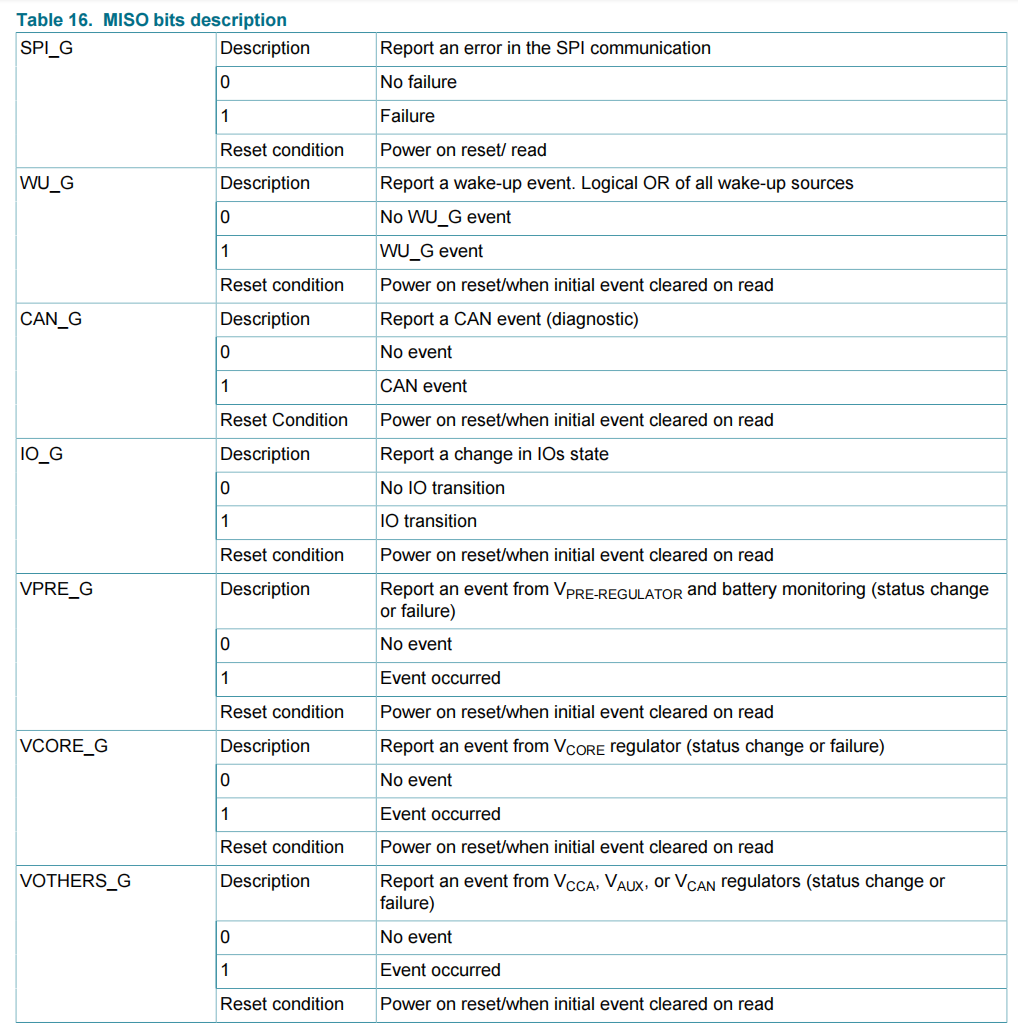
MISO位描述
主逻辑寄存器映射的详细信息
INIT_VREG
- INIT_VREG的SPI写入和读取数据帧格式如下:
- 位描述如下:
CAN_MODE
- CAN_MODE的SPI写入和读取数据帧格式如下:
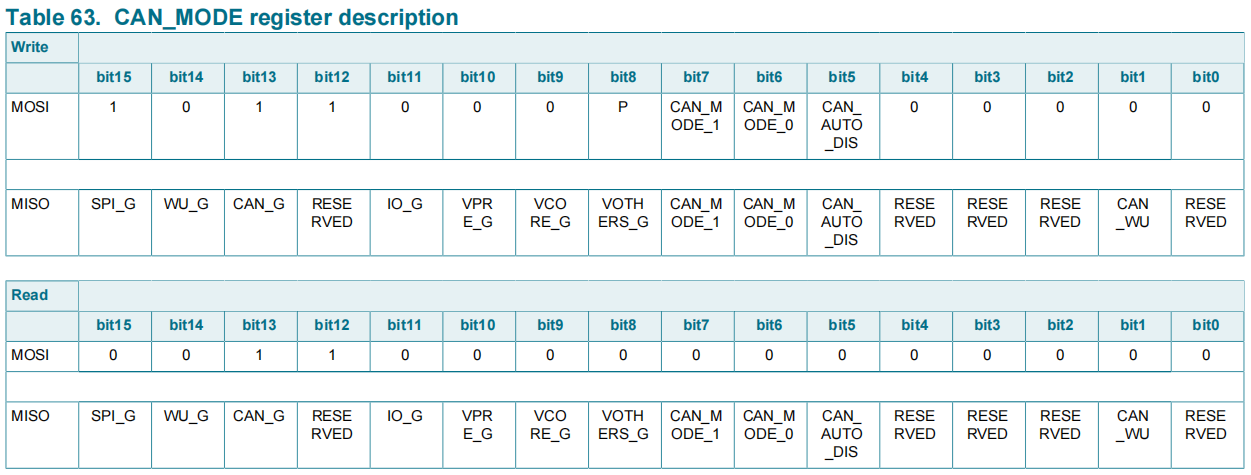
- 位描述如下:


















 5524
5524

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











