







为了实现usb转虚拟串口的功能,本人足足弄了半个多月,接下来本人介绍一下自己在这过程中踩的坑——
首先,按照博文:https://blog.csdn.net/newbie_Blogger/article/details/92617242里面的步骤来进行第一步工作。
但是发现,自己的电脑没有一点反应,什么设备都没有发现。之后,本人去啃了usb协议和源码,发现引脚没有初始化,于是添加了引脚的初始化:
void HAL_PCD_MspInit()
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
__HAL_RCC_USB_OTG_FS_CLK_ENABLE(); //使能OTG FS时钟
//配置PA11 12
GPIO_InitStruct.Pin=GPIO_PIN_11|GPIO_PIN_12; //PA11 12
GPIO_InitStruct.Mode=GPIO_MODE_AF_PP; //复用
GPIO_InitStruct.Pull=GPIO_NOPULL; //无上下拉
GPIO_InitStruct.Speed=GPIO_SPEED_HIGH; //高速
GPIO_InitStruct.Alternate=GPIO_AF10_OTG_FS; //复用为OTG FS
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); //初始化
}
在这里,本人顺便也添加了usb的复位——上电后拉低USB数据线,让主机识别为断开, 延时一段时间再释放去初始化,避免了复位后需要插拔数据线。
void USB_Reset()
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11 | GPIO_PIN_12, GPIO_PIN_RESET);
GPIO_InitStruct.Pin = GPIO_PIN_11 | GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
//delay_us(700);//delay 10 ms
}
这下子,电脑端有反应了,只不过是识别出未知设备。。。(还得再去好好研究)
之后发现,原来是usb的时钟没有配置好——usb的时钟必须是48MHZ
配置好时钟之后,电脑端在“其他设备”中显示RTT Virtual Serial,这说明还没有成功。。。(奔溃了)
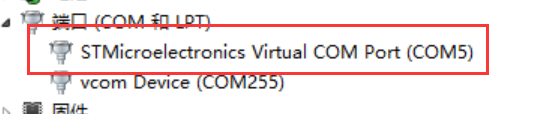
之后,本人利用逻辑分析仪进行抓包,并跟没有问题的包(利用hal库实现的usb转串口)进行对比,发现idVendor和iManufacturer这两个并不一样,并提示Vendor。于是本人将他们改为一样的(idVendor=0x0483, iManufacturer=0x5740),没想到就OK,没有问题了。

main.c代码如下:
#define LED_Y GET_PIN(A, 1)
#define LED_R GET_PIN(A, 2)
#define LED_B GET_PIN(A, 3)
/* 用于接收消息的信号量 */
static struct rt_semaphore rx_sem;
static rt_device_t serial;
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void serial_thread_entry(void *parameter)
{
char ch;
while (1)
{
/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */
while (rt_device_read(serial, -1, &ch, 1) != 1)
{
/* 阻塞等待接收信号量,等到信号量后再次读取数据 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
/* 读取到的数据通过串口错位输出 */
rt_device_write(serial, 0, &ch, 1);
}
}
int main(void)
{
int err = 0;
rt_thread_t tid;
char buf[] = "hello rt-thread!\r\n";
serial = rt_device_find("vcom");
if (!serial)
{
rt_kprintf("find failed!\n");
return RT_ERROR;
}
err = rt_device_init(serial);
if (!serial)
{
rt_kprintf("find failed!\n");
return RT_ERROR;
}
err = rt_device_open(serial, RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX);
//初始化信号量
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
// 设置接收回调函数
rt_device_set_rx_indicate(serial, uart_input);
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
while (1)
{
rt_device_write(serial, 0, buf, rt_strlen(buf));
rt_pin_write(LED_R, PIN_HIGH);
rt_thread_mdelay(500);
rt_pin_write(LED_R, PIN_LOW);
rt_thread_mdelay(500);
}
return RT_EOK;
}
















 1903
1903











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









