




 本文介绍了一种自制的角度测量装置,使用Kinect配合机械结构实现不同角度的精确测量。作者利用1.5米长的金属螺纹杆、3D打印的支架、电位器、步进电机等组件,通过Arduino进行控制,实现了根据需求旋转指定次数的云台扫描。
本文介绍了一种自制的角度测量装置,使用Kinect配合机械结构实现不同角度的精确测量。作者利用1.5米长的金属螺纹杆、3D打印的支架、电位器、步进电机等组件,通过Arduino进行控制,实现了根据需求旋转指定次数的云台扫描。
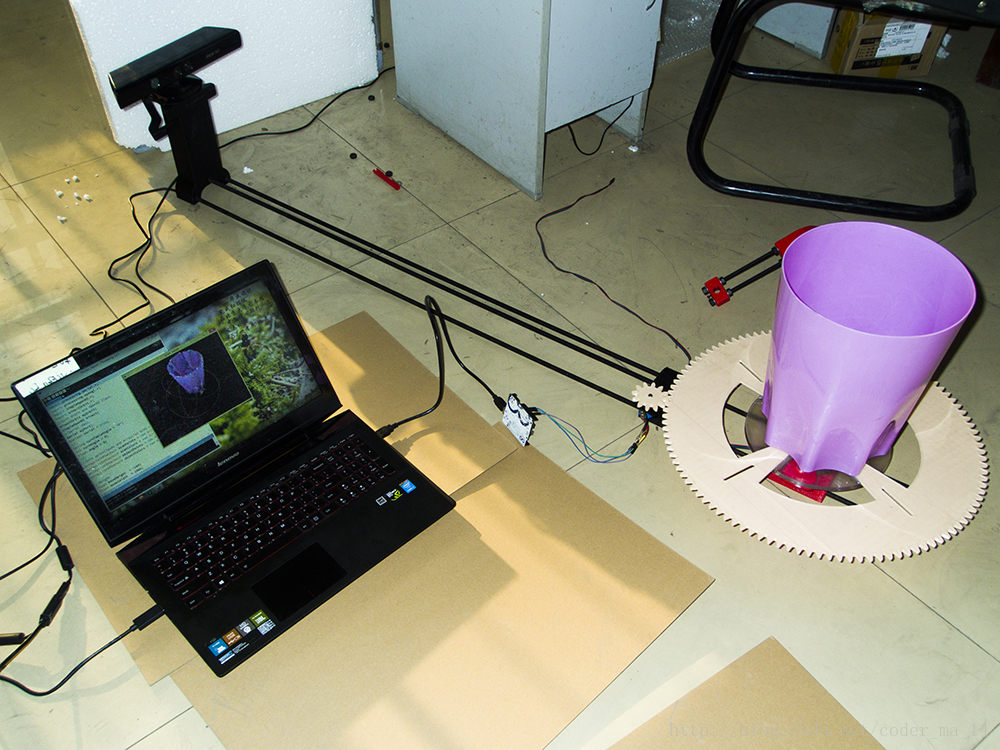
完成图
我之前的博客提到了各种坐标系的转换
我们必须要注意 当一个坐标系的原点 处在另一个坐标系中的时候 它们之间的关系
除此之外 我们也需要考虑到Kinect最小的测量范围 以及距离过远时Kinect测量精度降低的劣势
于是我淘宝了一下 丝杆 买了几根差不多1.5米长的金属螺纹杆
又3D打印了几个个台子,用来放Kinect、电位器、步进电机和云台
齿轮
我只是一个普普通通软件工程专业的大三学生
如果你认为我意淫出来的这套测角度装置问题很大,那请你自己设计一套。
讲一下我的思路
大小齿轮的比例为9:1
电位器能够旋转10圈
Arduino模拟口输入范围是0~1023
大致理解为电位器转一圈就是36°


云台
上电的时候,步进电机按需求旋转。
比如说我要3次扫描,电机就转3次,具体扫描次数可调。
不上电的时候,可以手转大齿轮,实现任意角度任意次数的扫描。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









