




电机选型:
一.普通电机(只知道一个方向转,转速1500r/min,精度低,适用于流水线)
1.三相异步电机
非标中用到三相异步电机,主要是在一些对精度基本没要求,不需要精确定位以及仅需要持续提供动力运行的场合,
比如输送线、提升机之类的。二是此类电机一般不单独使用,而会搭配减速机或者直接购买自带减速机的减速电机使用,
2.调速电机(单向电机+减速机)(流水线用的最多,常见品牌:精研,中大)
减速机带来的速度的变化是固定的,减速后是多少就是多少。而若想进一步改变转速,只能对电机进行调速
一般常见的是两种调速方法,一种是买专用的调速电机(本质是通过电压调速),另一种则是利用变频器调速。大多情况下,我们调速主要是往小了调,这点之前提到减速机的时候也解释过。
首先说说调速电机,此类电机一般是单相电机,功率一般不大,多用于轻工业中的小型输送线体。所以本质其实就是一个单相异步电机搭配一个调速器,
而调速器调速原理通俗来讲就是改变电压值,进而改变其转速,电压越低转速约慢。注意此类调速一般有个建议调速范围,一般在最高转速的百分之六七十以上(可咨询厂家)。
当然理论上可以调到更低,只是电机容易发烫且输出力道会小很多。所以当你发现你买的电机需要调速到百分之六十以下时,你应该考虑是不是电机选择的不合理。
可以选择一个减速比更大的电机,这也就是我之前提到的减速机的意义。先通过减速机将电机的高转速降到一定的值,然后通过调速器微调。
如果调速范围需求比较大,可以直接购买专用的变频电机,此类电机与普通异步电机主要的区别是他的散热风扇是单独驱动的,不受转子转速影响,当然价格相比普通异步电机更贵。
变频器调速的特点是,在 50HZ 以下调(一般也都是往下调,减速嘛),频率下降转速下降,电机的输出扭矩是不变的,也叫恒扭矩调速。
调速电机选型案例:
那我们一般怎么选型调速电机,公司流水线速度一般为300mm/s,滚筒直径一般为40mm.
计算实际转速N=V/πD,N是电机转速,V是流水线速度也就是负载速度,π是常数为3.14,3.14D是滚筒直径
N=V/πD=0.3/3.14x0.04=2.5转/秒
2.5转/秒 x 60秒 = 150转/分
1500/150 = 10 所以用10比的减速机就可以了
为啥公司要用大减速比减速机呢?用大减速机,那么就要加大主动轴直径,提高了皮带与滚筒的接触面积,使皮带不会打滑。
20kg重,f=μmg=0.2X20X10=40N
会直接取摩擦力的1/3作为张紧力(经验值)。所以总的电机输出力F=μmg+1/3μmg=53N
输出功率 P=KFV/η=2X53X0.3/0.75=42.4W
扭矩:T=(μmg+F)*R=53N x 0.02m = 1.06nm 除以10比减速比,还有0.106nm , 100w电机在10比减速机下有0.6nm扭矩,所以100w电机足够了。
普通电机选型看功率和扭矩。因为不是精确运动,所以不用看惯量。
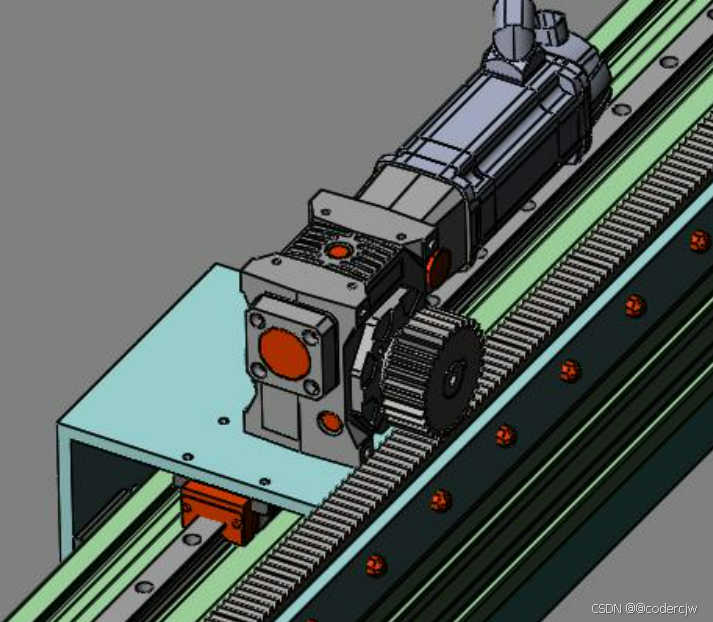
齿轮齿条伺服电机选型:
已知条件:齿轮分度圆直径95.49mm,负载质量150kg,负载移动速度2.35m/s,
先计算负载需要的力矩:负载受到的力为摩擦力umg=0.25*150*10,加减速力ma=150*a,
因为负载比较大,启停频繁所以就给0.5S的加减速时间,所以加速度=V/t = 2.35/0.5=4.7m/S^2
-
电机扭矩 = 力(umg+ma ) x 齿轮半径 = (0.25*150*10+150*4.7)N x 0.09549米/2=51.6N*M
-
惯量分为两个部分,一个是齿轮惯量,一个是负载惯量
-
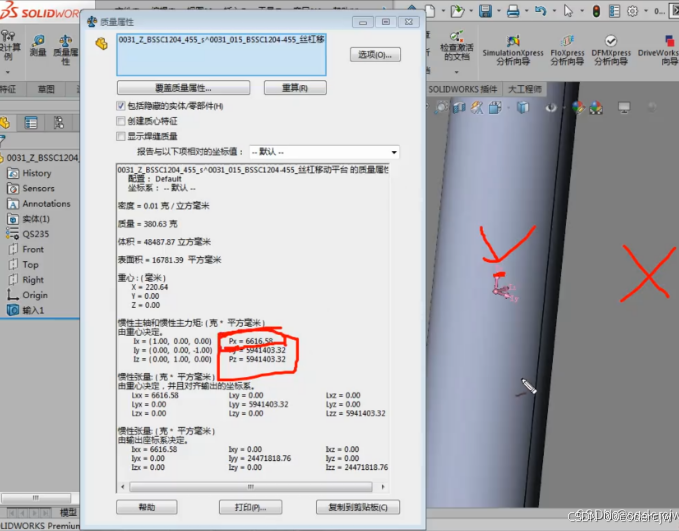
齿轮惯量:直接在sw里面测量,用SW中的质量属性直接求得物体转动惯量,点击评估,点击质量属性,选择绕哪根轴旋转(x轴),下面就会有惯量出来了。
-
负载惯量:J=m*R²=150kg*(0.09549m/2)^2=0.3419 kg·m²
-
通过最小速度来计算电机最小转速: 负载移动速度 / 齿轮分度圆的周长=2.35/0.09549*π=7.8r/s=470r/min,电机最少需要470转/分钟的转速
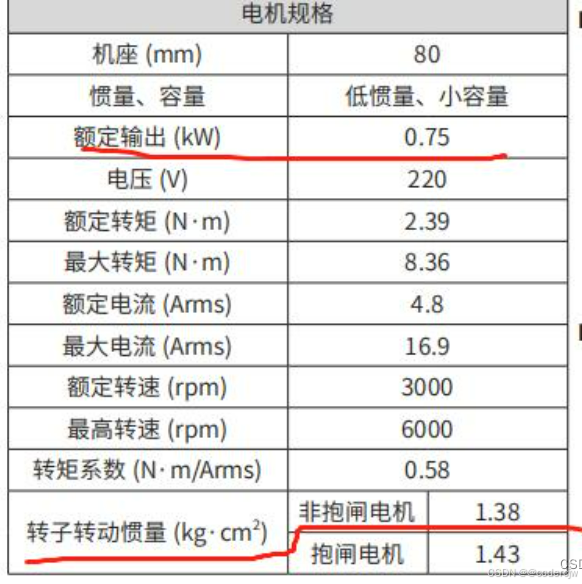
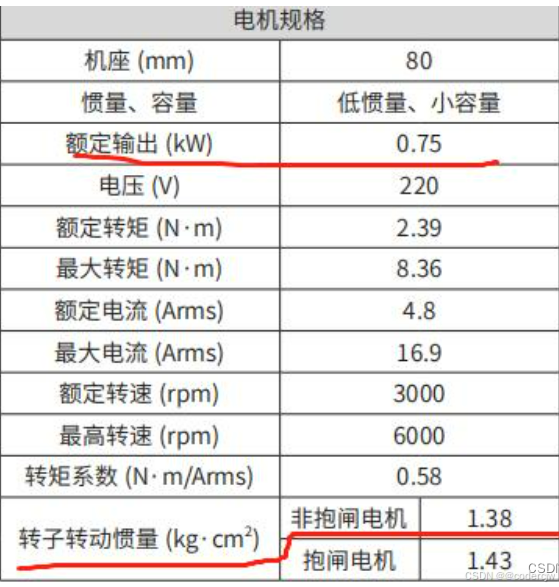
查台达伺服电机官网可知,如果选择台达2000W伺服电机,额定扭矩就是9.55N*M,额定转速是2000r/min,从扭矩来看最起码要加5倍减速机才能达到负载扭矩,这个时候输出转速就是400r/min,所以2000W不行。
选择台达3000w伺服电机,额定扭矩19.1N*M,额定转速1500r/min,额定惯量53.63x10^-4kg.m^2,通过扭矩来看,加个三倍减速机就可以满足负载扭矩,而且减速后,转速还是满足的,输出惯量:0.005363*9 (电机惯量x减速比3的平方)=0.04826 (KG*M^2),
最后看惯量比,一般是10以内,0.3419 (kg/m^2)(负载惯量)/0.04826 (KG*M^2)输出惯量 = 7.08 < 10,负载惯量与输出惯量比小于10,符合要求。
二. 步进电机(高精度,转速600r/min,反应快,能频繁正反转,价格便宜,但没有反馈信号,所以不知道走了多少)(小流水线用的多,常见品牌:雷赛)
步进电机和伺服电机可以通过驱动器发射的脉冲数来控制转速,不用加减速机也可以调速,加减速机的作用其实是增加电机的扭矩和惯量。
驱动器发的脉冲信号越多,电机就转过的角度就越多,即通过控制脉冲个数进行精确定位。第二个方面,驱动器发送脉冲信号的频率就决定了电机的转动快慢,也就是通过控制脉冲频率达到精确调速。
步进电机一般使用转速在600转以内,这一点大家一定要明确。而之所以限制在这个转速内,主要是因为其输出扭矩是随着转速的升高而下降的,
当转速超过600转以后,输出扭矩会急剧下降,那么可能原先能带动的负载现在就带不动了
比如57的步进电机,指的就是他的法兰尺寸是57X57,其实就是他的外框尺寸,当然机座号越大,电机越大。
步进电机选型:
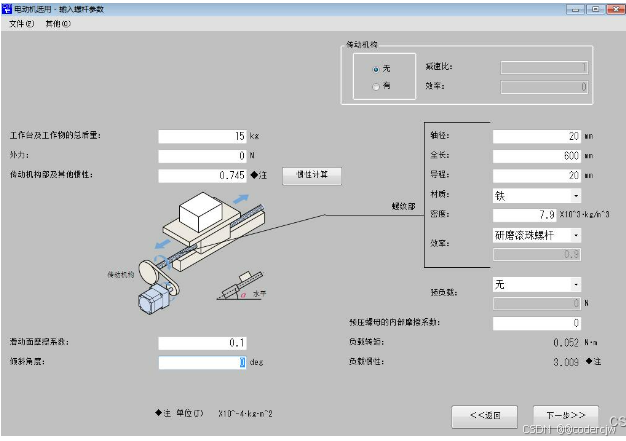
(1)丝杆模组选型步进电机(丝杆模组没带减速机)
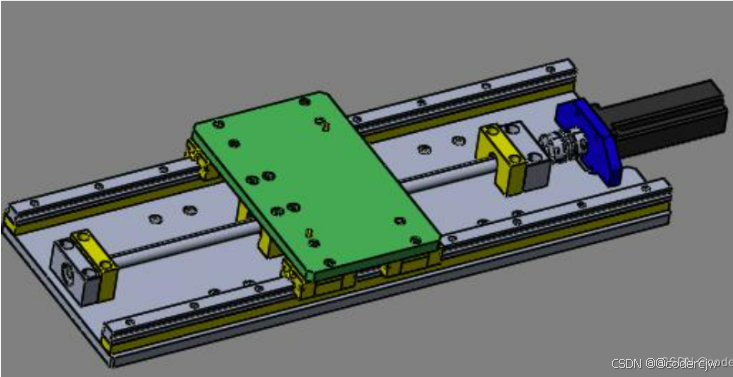
负载速度:0.2M/S
负载总质量:15KG(丝杠螺母上的所有负载质量,可以通过软件计算)
丝杠长度0.6M
丝杠直径20MM
丝杠导程(丝杠转一圈,上面的负载移动20mm):20MM
移动距离0.52M
摩擦系数0.1
机械效率0.9(主要来自导轨、轴承、丝杠)
定位时间2.6S
加减速时间各为0.2S
分辨率(精度)(即丝杠可以走的最小距离):0.05mm/step
(a)计算步距角,确定电机相数:
通过客户给定的分辨率可以计算出步距角,分辨率也叫脉冲当量,就是电机发送一个脉冲,带动负载前进的最小距离/最小移动量,也就是精度。
步距角=(360°·分辨率)/单位移动量 =(360°·0.05)/20=0.9°
故选择2相步进电机通过2倍细分可以达到此步距角。
(b)计算所需转速:
转速和负载速度有关,因为负载平移是通过电机带动丝杠旋转,进一步带动丝杠螺母平移的。丝杠导程20MM就代表丝杠每转一圈平台就往前移动20MM故:
N(丝杠转速)=V(负载速度) / Pb(导程)=0.2m/0.02m=10RPS(转每秒)X60 = 600RPM(转每分)(电机转速一般都是转每分)
因为是通过联轴器连接,所以丝杠转速就等于电机转速
(c)计算匀速运行时的扭矩:
前面说过,普通电机选功率,而控制电机一般是选扭矩。那就得计算带动负载运行所需扭矩大小。对于扭矩,我们之前学过力矩,就是力乘以力臂,力矩用在旋转轴上就是扭矩,扭矩的符号用T表示,数值单位用NM(牛米)
T=(μmg+F)*R,
R:带/齿轮半径,
μmg:摩擦力,
F是除摩擦力外的力(依据实际情况看要还是不要),比如竖直提升时还额外受到重力,
上面的公式本质就是T=FR,然后来单独讲本案例中丝杠驱动机构的匀速扭矩计算,因为丝杠有点特殊,T=FR中的R并不是丝杠本体的半径。丝杠是通过自身的旋转,然后带动螺母座往前移动的。而不像带齿轮这样,旋转运动时直接驱动负载的。丝杠本体转动一圈,平台移动一个导程,那可以认为这个导程就是其相对周长,类比与带齿轮。那么根据周长=2πR公式可以推导出丝杠驱动半径R的计算公式:R=Pb/2π半径有了,就可以计算匀速扭矩了,
公式:T=(μmg)*(Pb/2π)=0.1X15X10X(0.02/(2X3.14))=0.048NM(牛米)
(d)计算加速扭矩:
加速扭矩就是加速时克服惯性而额外输出的扭矩,
其公式如下:T=JXβ关于式子中的字母代号,
先简单介绍下:T就是加速扭矩,J是负载的总惯量,β是角加速度.
(e)先来看β角加速度:
β=ω/t,
360度就对应2π,这里的π在数值上就是3.14,所以360度也可以说是2π弧度,或者6.28个弧度,那么180度就对应一个π,弧度90度就对应0.5π弧度,计算分析中,描述角速度,我们一般都是用的弧度制。
电机是600转每分钟,那么每秒钟就是10转,而一转是2π弧度,所以10转就是10X2π个弧度,故角速度就是20π弧度每秒,即62.8rad/s(要记住角速度w的单位是rad/s),
所以转速求角速度的公式就是:(下面式子中的N得是每秒转速)
ω=2πN
角速度出来了,就可以算角加速度了,题目中告知了加速时间是0.2S所以β=ω/t=62.8/0.2=314rad/s²
关于加速时间再提一点,一般普通电机加速时间我们取0.5-2S
步进电机0.2-0.3S,伺服电机0.1-0.15S以上是经验值,也可根据实际调试而来。
(f)接下来看J负载总惯量如何计算:
负载惯量的计算分两部分,转动件的转动惯量,和平移部分的直线运动惯量。
先来计算转动惯量,这个案例中转动件主要是丝杠和联轴器,
J=(m*R²)/2
用SW中的质量属性直接求得物体转动惯量,点击评估,点击质量属性,选择绕哪根轴旋转(x轴),下面就会有惯量出来了。
我们这里的轴只是举例用的,不是上面丝杠的大小。
注意:惯量的单位不同样册或者文章中可能表述都不一样,大家只要会换算即可。
常见的有 kg·m² g· mm² kg·cm²
换算:10kg·m² = 10 x 10⁹ g· mm² = 10 x 10⁴ kg·cm²
然后来计算平移部分的直线运动惯量也就是负载惯量:
惯量公式就是J=m*R²。
丝杠传动的驱动半径是用导程除以2π
所以负载惯量:
J=m*(Pb/2π)²=15 x(0.02/2·3.14)²=1.5·10-4kg·m²
所以总惯量就等于:
J总=J丝杠+J负载=0.0000744kg·m2+1.5·10-4kg·m²=0.744·10^-4+1.5·10^-4=2.244·10^-4kg·m²
所以加速力矩就等于:
T加 = J总Xβ= 2.244·10^-4kg·m² X 314rad/s² = 0.07NM
故电机需要的理论扭矩即总扭矩:
总扭矩T=T加+T匀 = 0.07NM + 0.048NM = 0.118NM
接着对计算值,进行放余量并考虑效率得出电机所需力矩:
T电=K*T理论/效率=3*0.118/0.9=0.393NM
步进电机选型的安全系数K推荐:300转以下取2,300以上取3
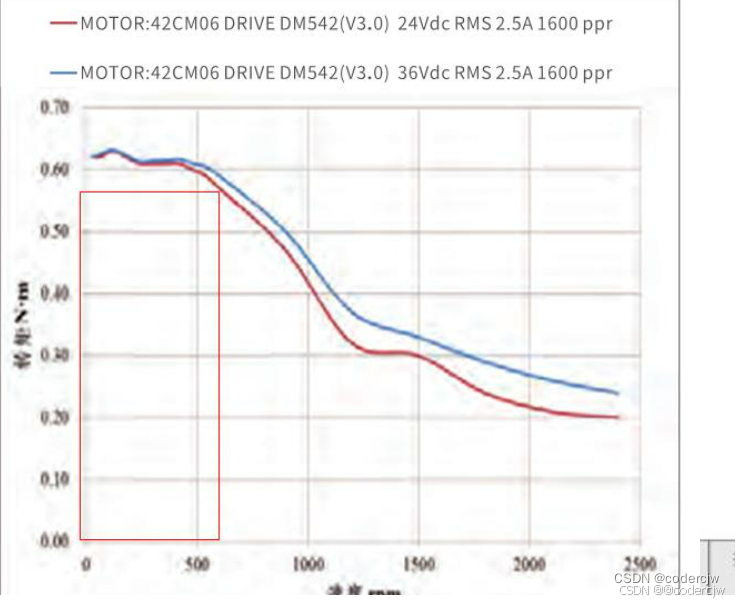
然后查看样册,选型合适的电机型号,一般可按如下步骤来选:1根据快速选型表(大部分品牌样册都有),快速拟定一个机座号这里以雷赛步进电机样册为例,我们查看其快速选型表,可以发现要输出0.393NM也就是0.4NM至少得选到42机座号。

所以初定42,那么具体的型号还得往下看2查看对应型号的矩频特性图,在你要求转速下,对应的转矩必须大于理论力矩第一步中已经初定了42机座号,所以翻到对应页面下,查看具体型号(同样的机座号,也有不同的机身长度,不同的工作电流,这些都会影响电机输出能力)
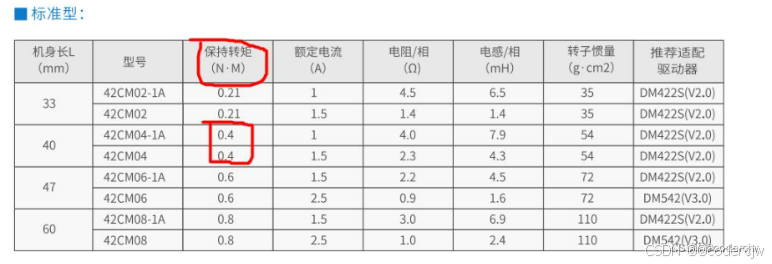
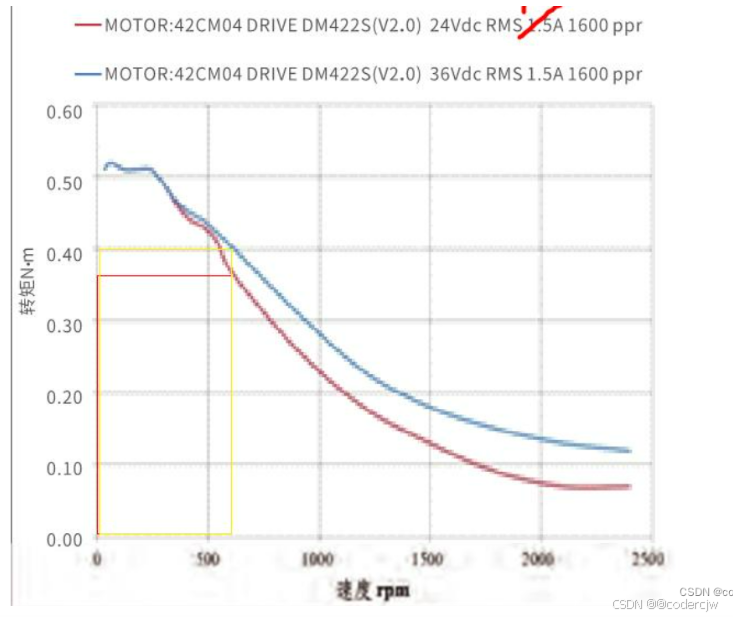
通过上图发现,机身长度至少40,那40下面还有两种型号,区别在于额定电流不同,一般的电流和电压越大,电机的中速运转性能越好,具体区别看矩频表观察上表发现,同样机座同样机身长度下,小电流在500转以后,力矩衰减的略微更快些。
然后我们发现,40机身长度下,不管哪个型号,在600转时都不满足0.4NM的要求,42CM04比较勉强,保险起见,还是加大一号,毕竟价格差不了太多。
所以我们选择步进电机型号:42CM06-1A对应驱动器型号DM422S(V2.0)
还可以直接用东方马达来选型(东方马达选型电机就是快,非常迅速,建议自己手算,踏实一些)
(2)同步带模组选型步进电机
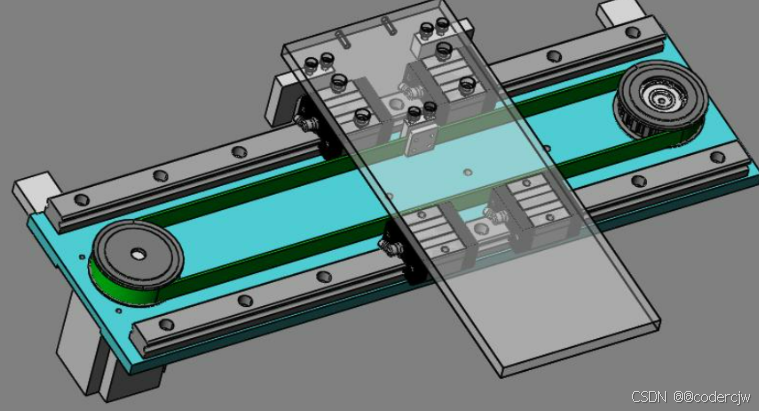
同步带和齿轮齿条驱动平台平移的计算方法是一样的,都是通过轮子的转动(齿轮或带轮),带动平台移动。拿同步带传动说,带轮上某个点转过的位移,其实就是带往前走的距离,因为他两是同步的。齿轮齿条也是同理,齿条固定的情况下,齿轮兼转动以及移动,齿啮合的同时,齿轮也在往前移动中。
故:N(齿轮或带轮转速)=V(负载移动速度)/2πR(齿轮或者带轮周长),R就是齿轮或者带轮的半径大小(严格来讲是分度圆,这个概念在后面章节再说)。因为对于轮子转一圈走过的距离其实就是他的周长2πR,那么用线速度除以周长,就是求轮子需要在一秒内走多少圈才能达到0.2M.
之前普通电机计算匀速时的推动力F是等于摩擦力的,那现在计算匀速时的扭矩,只需要用推动力乘以转动半径即可,即T=FR,T就是扭矩,F就是驱动力,R是以旋转形式输出扭矩的终端零件的旋转半径,如同步带轮、齿轮,我们先讲以同步带轮或者齿轮驱动时的匀速力矩计算公式:
T=(μmg+F)*R,
R:带/齿轮半径,
μmg:摩擦力,
F是除摩擦力外的力(依据实际情况看要还是不要),比如竖直提升时还额外受到重力,
三. 伺服电机(高精度,高转速,转速3000r/min,高反馈,反应快,能频繁正反转,价格高)(适用于各种丝杆,同步带,齿轮齿条模组,常见品牌:汇川,台达,松下。)
编码器原理说的简单点就是通过码盘上的条纹透光和不透光交替,将信号的有无(光的通断)转为电信号即反馈脉冲,并且上面还有能表示转动能方向的条纹。正是由于编码器,
系统能准确的掌握电机的位置、转动量和转动方向。故伺服电机精度取决于其编码器更具体的说取决于编码器的位数,而编码器又有增量式编码器(便宜)和绝对式编码器(贵)。
对于我们非标设计人员来说只需要知道,增量式编码器在断电或者设备重新开机后他是不知道自己当前位置的,故需要回零位,才能重新运行。
绝对式编码器则不需要回零位,但是价格较贵,大部分伺服电机配置的是增量式的。
驱动器是控制电机速度
编码器是控制电机知道自己走了多少步数
(1)伺服电机的惯量匹配
伺服电机选型时,一般要看下惯量比,惯量比等于负载惯量/电机转子惯量(样册上有)
一般电机规格越大,输出能力越大,转子越粗壮,自然转子惯量越大。而负载惯量自然与负载质量有关,步进篇中讲过计算方式。
之所以要匹配惯量比,即控制在某个值下。因为惯量比如果太大,那么相当于小马拉大车,会造成电机运行不稳定、响应缓慢、发热、容易过载、噪声共振、定位精度不足等各种不良情况,或者可以这么理解,负载的惯量越小,那么自然整个系统的控制更加容易更加可控。
有减速机构的时候,惯量比=(负载惯量/i²)/转子惯量,所以加减速机是能降低惯量比的,也就是能增大整个系统的刚性。(i²表示减速机减速比的平方)
关于惯量比选择的推荐
1、高精度、高响应、加速时间在0.1S内,惯量比在5-10内如高速贴片机、点胶机、加工设备、雕刻机等。(对于这些设备大家不了解没关系,只需要知道用于三高要求的场合下即可)
2、一般精度和响应性,响应速度在1S内,惯量比在20内
3、单纯的点到点输送或者加速时间1-5S,此时惯量比可在30甚至超过30使用如移栽手、输送设备等
伺服电机选型:
(1)伺服电机选型案例一:伺服电机带动的分度转盘选型
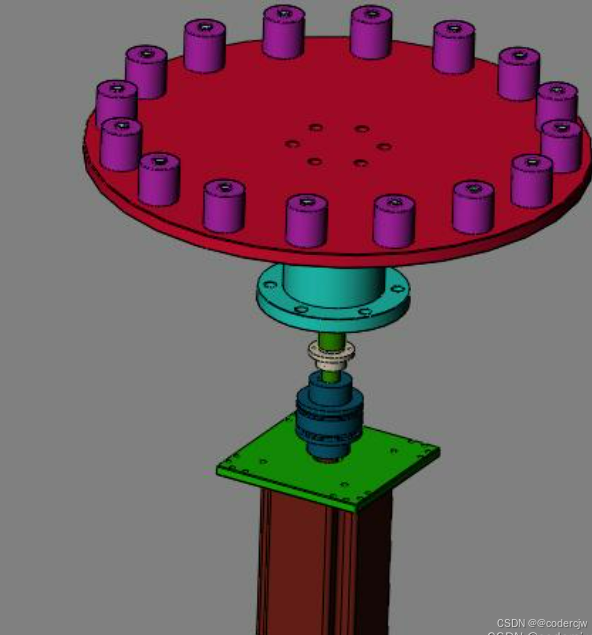
已知条件:
转盘直径D=500MM
转盘质量7.9KG
转盘厚度H=15MM
载具数量:16
总质量:2.14KG
载具中心到转盘中心距离:220MM
联轴器惯量:0.1·10-4kg·m²
加速时间t1:0.1S
减速时间t2:0.1S
匀速时间t3:0.3S
安全系数K:2关于安全系数K总结(经验值):步进电机300RPM以下使用K取2,300RPM以上可取3-4伺服电机K取1.5-2
转速计算:
转一圈360度,总共16工位,所以工位间角度就是22.5°整个运行过程是经历了加速匀速减速的,而我们要求的转速自然是稳定后的运行转速即匀速转速
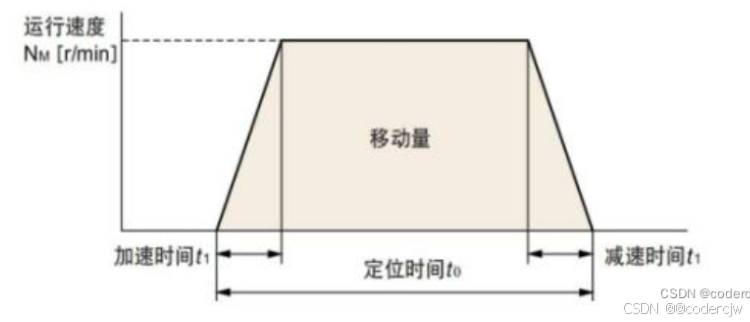
要求转速,其实本质就是求角速度,而角速度未知,我们就直接用ω代入公式计算从题知,22.5度这个转位角度是经过0.1S加速0.3S匀速再加0.1S减速得来的那么把这三个过程的运行距离分别列出来,相加得22.5度就能求出角速度(用面积求法,速度乘时间等于路程,也就等于图形面积)
ω*t1/2+ω*t2/2+ω*t3=22.5°求得ω=56.25°/S换算成弧度制0.98rad/s
8.3匀速力矩计算:
此模型是转盘在电机带动下转动,由于匀速时摩擦的主要来源就是轴承,而轴承的摩擦我们一般不计算,我们将其对运动的阻碍考虑在效率中,所以此案例不用计算匀速力矩
8.4加速力矩计算:
还是同样,分别计算惯量和角加速度,相乘就是加速力矩
8.4.1惯量计算:
惯量主要来源是转轴、转盘、以及转盘上的工件,当然联轴器也存在惯量
转盘惯量可以通过软件直接读出
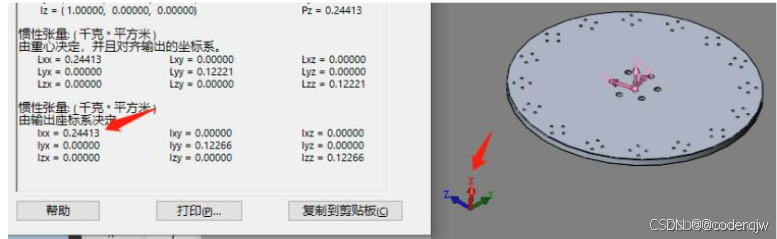
也可手算,公式如下:(实心回转体一般都需要除以2)
J转盘=mr²/2=7.9*0.25*0.25/2=0.2468kg·m²=2468·10^-4kg·m²
J负载=mr²=2.14*0.22*0.22=1035·10^-4kg·m²
公式中的R是载具中心到转盘中心的距离m是16个载具总质量
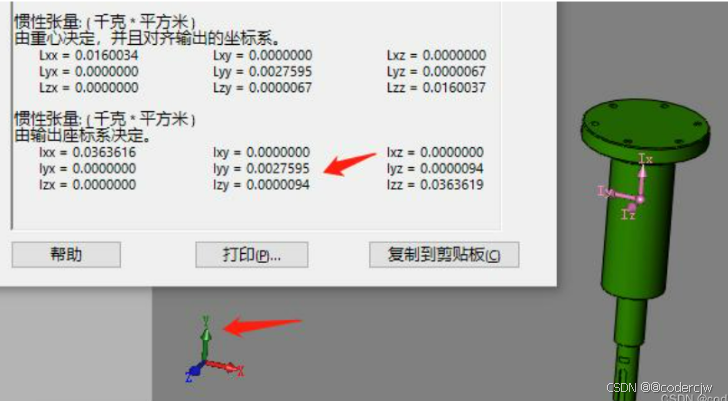
转轴惯量:转轴质量4KG,惯量软件查得27.6·10^-4kg·m²
联轴器惯量已知,
故总惯量J总=J转盘+J负载+J联轴器 = 3,530·10^-4kg·m²
8.4.2角加速度计算:β=ω/t=0.98/0.1=9.8rad/s²(0.1为加速时间)
8.4.3加速力矩计算:
T加 = J总*β = 3,530·10^-4kg·m² X 9.8rad/s² = 3.46NM
8.5电机力矩计算:
T电 = T加*K = 3.46*2 = 6.9NM
6.9NM的伺服电机扭矩很大了,所以这里需要加减速机,来减小电机的规格,否则电机得选个很大的,并且很贵。拿6.9NM来讲,汇川的伺服电机要选到2.5KW太大了,非标中使用最多的伺服电机功率基本在200、400、750W
并且从惯量比上考虑,也要加减速机。此案例为回转盘对响应性要求不高,定位精度也不算高精度,单纯用于定位,惯量比可以在30附近。计算下不加减速机时需要电机转子惯量多少时,能控制在30附近
J电机=J总/30计算出电机转子惯量至少需要117.60·10^-4kg·m²,而上面提到的2.5KW伺服电机的转子惯量也才3.65·10^-4kg·m²,明显差的太多所以不管从电机价位上考虑,还是从惯量比上考虑,加减速机都是很有必要的
8.6匹配减速机:
一般控制电机匹配的减速机为行星齿轮减速机(具体的后面有减速机章节),我们初选一个减速比,比如10,然后来计算下,加了减速机后电机需要的扭矩以及惯量
减速机有减速增扭的作用,速比10,即电机通过减速机后,输出转速会变成十分之一,但是扭矩会增大十倍。那么原先我们需要电机输出6.9NM现在由于减速机的放大,电机只需要输出0.69NM即可,行星减速机还可以有效减小惯量,从而减小传动机构对伺服电机的冲击,提高设备稳定性和响应性。
故加了减速机后需要的转子惯量:J电机=J总/i²/30=1.17·10^-4kg·m² (i²表示减速机减速比的平方)
至此可以来选伺服电机了
其实单看扭矩的话,400W的伺服电机就够用了,甚至200W也能输出0.64NM。但是出于惯量匹配考虑此处还是选了750W的非抱闸电机,当然实际中也不排除惯量比超过30甚至50依旧也在用的。
同步带模组伺服电机选型:
(2)伺服电机选型案例二:伺服电机带动的同步带模组选型
9.1已知条件:
同步带质量0.5kg
同步轮直径0.05m
同步轮质量0.5kg
负载总质量3.5kg
负载运行速度1.0m/s
负载定位时间1.0s
电机加速时间0.1s
电机匀速时间0.8s
电机减速时间0.1s
负载移动距离0.9m
摩擦系数0.1
机械效率0.8
安全系数1.5
9.2转速计算:
所需转速也就是同步轮的转速,由线速度V和轮子周长C即可计算,原理前面章节以解释过,不再赘述。N=V/C=1/0.157=6.4rps=382rpm(转每分)➗60 = 6.4(转每秒)
公式中的C是轮子周长既然算到了转速,那顺便可以算下角速度和角加速度,后面算力矩会用
9.3角加速度计算:
ω=2πN(这里的N是转每秒,因为角速度是弧度每秒)=6.28*6.4=40.2rad/s
β=ω/t1=40.2/0.1=402rad/s²
9.4匀速力矩计算:
T匀=μmgR=0.1*(0.5+0.5+3.5)*10*0.025=0.1125nm
9.5加速力矩计算:
T加=J总*β
9.5.1转动体惯量:
J同步轮=J=mr²/2=1.56·10^-4kg·m² 此处无联轴器,电机与同步带轮是直连
9.5.2负载直线运动产生的惯量:
J负载=m(负载总质量)r²=4*0.025*0.025=0.0025=25·10^-4kg·m²
9.5.3总惯量:
J总=2*1.56·10-4+25·10-4=28.12·10-4kg·m²=28.12kg·cm²(注意同步带轮有两个)
9.5.4加速力矩:T加=J总*β=28.12·10-4X402=1.13nm
9.6计算总力矩和电机力矩并选型电机:
T总=T匀+T加=0.1125+1.13=1.24nm
T电机=T总*K/η=1.24*1.5/0.8=2.325nm
9.7考虑是否需要加减速机,首先是同步带点到点定位运动,惯量比要求30内即可发现750W电机扭矩和惯量比都匹配故可直接选用
这里再补充下,实际中此案例的工况,可能也会配减速机,因为对于伺服电机虽然能工作在任何转速下,但是想让其运行在最佳状态,建议上还是让其在额定转速附近工作。并且配了减速机后,伺服电机可以再选小几个规格,成本上也是合适的。不过具体如何选择,并无标准。非标设计本身就是10个人可能有10种做法

















 4401
4401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









