




大部分情况下,用快速选型就可以了,但是呢,有些时候重载,急停,精密度高这种特殊情况的时候,我们就要计算了。这套选型是最精密的一套计算选型,看完这个,以后就不用再学习其他电机选型了。
1.普通电机选型1
三相异步电机
定子:产生旋转磁场
转子:切割磁场,产生洛伦兹力
结构简单,成本低,稳定
效率较低,转速不稳定
N=60xf/P
磁场旋转速度:1500
电机旋转速度:1450
优点:结构简单,成本低廉
矽钢片
硅钢片 SI
同步电机:转子自己励磁或者永磁,转子转速与磁场转速一致
效率高,转速稳定
高转速场合,运行稳定性有要求的场合
普通电机:
三项、单相异步电机
减速电机
交流电机和直流电机
微型:直流电机
碳刷电机:普通直流
无刷电机:高转速场合,低噪音场合(寿命是碳刷电机的6倍以上)
永磁电机
励磁电机
调速电机:
降压调速:通过调整电机的输入电压,改变电机转矩
变极调速:有级调速。P越小,转速越高,转速越高,扭矩越小
变频电机:改变电流频率,实现变速
单相异步电机(200W)
同步电机:反复启停,反复正反转,运行平缓,高转速
电磁制动电动机(抱闸电机):快速停止要求,绝对停止
力矩电机:转速随负载变化,恒力矩输出
如何做到恒力矩输出,有下面三种方法:
1. 使用力矩电机
2. 磁粉离合器:配合普通三项异步电机使用,一般用于收卷
磁粉制动器:单独使用,一般用于放料(卷料、铜线)
3. O型皮带(圆带)
减速电机:
S系列蜗轮蜗杆减速机
输出转速:0.1-397RPM
输出转矩:70NM-4200NM
功率:0.12KW-252KW
自锁能力
R系列同轴减速机
输出转速:0.05-1829rpm
输出转矩:50-18000NM
功率:0.09kw-160kw
F系列
输出转速:0.1-752rpm
输出转矩:130-18000NM
功率:0.12kw-200kw
K系列
直角伞齿轮
输出转速:0.1-522rpm
输出转矩:200-50000NM
功率:0.12-200kw
IP等级
IP68
IP44、IP54
在工厂内:高于IP23
户外使用条件:IP54
防护等级越高,散热越差 ,成本越高
电能-磁能-转动(机械能)
电热
热继电器
2.普通电机选型2
1、兰州-兰州电机
2、上海-上海电机
3、重庆-赛力盟
4、湖南-湖南湘电
5、安徽-皖南电机
6、河北-掹牛电机
7、山东-华力电机
8、南阳防爆
9、佳木斯电机
10、台湾-东元、台创、晟邦(城邦)、万鑫
1、瑞典-ABB
2、德国-西门子、力士乐、啸驰、诺德、赛威
3、日本-安川、三菱、三洋、松下、富士
电机选型流程
一、选择电机类型
1.小负载输送机:单相异步电机,调速电机
2.中大型输送机:三相异步电机,变频电机
3.收料机:力矩电机(堵转) 伺服力矩控制(打螺丝,拧紧伺服)
4.反复启停、反复正反转:同步电机
5.低转速大扭矩输出:减速电机
6.一般精度一般转速控制:步进电机
7.高精度高转速控制:伺服电机
8.高精度,高扭矩:DD马达
二、工况分析及计算
1. 小负载:计算功率
摩擦力 外力 皮带张紧力
2. 中大负载:计算扭矩及转速
P = T x N/9550
T:扭矩 N·M
N:转速 r/min rpm
P:功率 KW 千瓦
惯量
三、减速比计算
1.皮带带轮
2.丝杆传动:导程
3.齿轮减速:减速比 涡轮
4.同步带、链轮
减速机:通过降低转速,提高扭矩
重力:G=mg
m=质量 kg
g=9.8 10
摩擦力:F=μmg
μ:摩擦系数 钣金0.2 滚筒0.1 滚珠丝杆、直线轴承0.05
加速力:F=ma
a=V/t
功率计算:
P=F·V
F:摩擦力
V:直线运输速度
电机输出功率:
P=T·ω
T:扭矩
ω:角速度
扭矩、转矩 计算
T=F·R
齿轮,皮带轮,皮带辊
F传递的力
R半径
除了皮带辊以外,其他的传动均属于减速机构
滚珠丝杆匀速力矩
T=Pb·(μmg+F)/2π
μmg:摩擦力
F外力
Pb导程
摩擦力不可忽略
皮带张紧力:F=0.33μmg
因皮带张紧而导致传动系统所增加的额外负载
匀速直线运动所需要的克服的力(摩擦力、皮带张紧力)
加速扭矩:T=J·β
J:直线惯量+转动惯量
β:角加速度
β=ω/t
t:加速时间
ω=2πN/60
N转速
惯量:
空心轴:J=mr^2
均质圆柱体惯量:J=(mr^2) / 2
计算负载的时候可以放大,不能缩小
滚珠丝杆、皮带辊 要算全惯性惯量:
J = M(A/2)^2
A:电机每转一圈 物体直线运动的距离
丝杆:A=Pb
皮带辊:A=周长
M:质量
3.中负载输送线电机选型:
皮带输送机上的负载重量:200kg
皮带输送机所用皮带重量:10kg
皮带与支撑的摩擦系数μ:钣金、型材0.2 滚筒0.1
皮带输送机工况安全系数:K(小负载2-3,大负载4-6) 4
皮带输送机的传动的效率:0.75(综合考虑,可小不可大)
皮带输送机所用滚筒直径:D=89mm
皮带输送机输送速度:V=0.25m/s
安全系数:计算时省略的越多,安全系数越大
g=10
g=9.8
P=F·V
F=摩擦力+皮带张力
F=μmg+0.33μmg
=0.1·210kg·9.8+0.33(0.1·210kg·9.8)
匀速直线运动时克服的力 =273.714N
P=F·V
=273.714·0.25
=68.42
P电机=P·K/效率
效率:传动过程中产生的损耗(驱动传动部分所需要的基础功率)
K:安全系数 (小负载2-3,大负载4-10)
=68.42·4/0.75
=364.9W
效率:轴承(对) 0.95
减速机0.9
滚珠丝杆0.98
梯形丝杆0.4-0.6
蜗轮蜗杆0.2-0.4 不确定
同步带:0.9
工况系数影响因素:海拔、工作制、环境温度、启动系数
皮带材质:
PVC整体防静电处理 聚氯乙烯 -10-80度 工业 烟草 物流 包装 便宜
PU 聚氨酯 优力胶 -20-80 耐油性好一点 粮食,工业 ,果蔬肉类
PE 聚乙烯 100度 无毒分解后无毒 食品 医药
橡胶皮带 -15 -130 户外 便宜 强度高 矿山冶金煤炭沙场 重型运输 摩擦力大
硅胶皮带 -70-280度 航天化工 冶金 电气绝缘
皮带支撑类型:
钣金 低速轻载
型材 低速轻载
滚筒 高速重载 成本高
混合支撑 滚筒+钣金 中速中载 性价比
4.普通电机选型3
板链输送机
1.皮带容易撕裂、刺穿、开裂 板链可以快速更换
维护简单
2.板链耐腐蚀优良
3.转弯能力优良
5.板链输送机选型:
板链输送机的滞留部分负载重量 M1=30kg
板链输送机的传送部分负载重量 M2=70kg
板链输送机的滞留部分板链重量 M3=20kg
板链输送机的传送部分板链重量 M4=20kg
板链输送机的回流部分板链重量 M5=40kg
板链输送机所用板链重量
M =板链每米重量(kg/m)·长度(m)
板链与负载间的摩擦系数 μ1=0.2
板链与滑轨间的摩擦系数 μ2=0.2
板链输送机工况安全系数 K=2(小负载 2-3、大负载 4-6)
板链输送机的传动的效率 η=0.75(要综合考虑,给小不给大)
负载在板链输送机上速度 V=0.25m/s
板链输送机所用链轮直径 D=142mm
1.滞留部分受力分析(160N)
(板链+负载) 板链与导轨之间的摩擦力
(M1+M3)·μ2·g
(30kg+20kg)·0.2·10
=100N
板链与负载之间的摩擦力
M1·μ1·g
30·0.2·10
=60N
2.传送部分受力分析(180N)
(M2+M4)·μ2·g
(70+20)·0.2·10
=180N
3.回流部分受力分析(80N)
空载状态下板链与导轨的摩擦力
M5·μ2·g
40·0.2·10
=80N
160+180+80=420N
实际需要的最低功率
P=F·V
=420N·0.25m/s
=105W
电机功率
P电机=P·K/效率
当K=2时 P电机=280W
当K=4时 P电机=560W
计算减速比
N=V/(πD)
N:电机转速 rpm
V:板链输送速度 M/S
D: 链轮直径
N=0.25 / 3.14 x 0.142
=0.56 r/s
=33.7 rpm
1400/33.7=41.5
减速比尽可能选小(输送速度大于预定速度)
计算出来41.5 选择减速比40-35
输送机速度高于预定速度一定范围内没关系
但是如果输送机速度低于预定速度,那么电机可能面临重选
变频一般不超过100HZ
倍速链:适用于高负载,高运行速度的输送机
6.倍速链输送机选型:
倍速链输送机的滞留部分负载重量 M1=40kg
倍速链输送机的传送部分负载重量 M2=60kg
倍速链输送机的滞留部分链条重量 M3=2kg
倍速链输送机的传送部分链条重量 M4=2kg
倍速链输送机的回流部分链条重量 M5=4kg
倍速链输送机所用链条重量 M =链条每米重量(kg/m)·长度(m)
倍速链输送线长度 L=5m
有滞留时链条与负载间的摩擦系数 μ1=0.1
有滞留时链条与滑轨间的摩擦系数 μ2=0.2
无滞留时链条与滑轨间的摩擦系数 μ3=0.08
倍速链输送机工况安全系数 K=4(小负载 2-3、大负载 4-6)
倍速链输送机的传动的效率 η=0.75(要综合考虑,给小不给大)
负载在倍速链输送机上速度 V=0.25m/s
倍速链输送机所用链轮直径 D=82.2mm
1.滞留部分受力分析
(M1+M3)·μ2·g
(40+2)·0.2·10
=84N
M1·μ1·g
40·0.1·10
=40N
2.输送部分受力分析
(M2+M4)·μ3·g
(60+2)·0.08·10
=49.6N
3.回转部分受力分析
M5·μ3·g
4·0.08·10
=3.2N
84+40+49.6+3.2=176.8N
链条输送速度:
V=物体输送速度/增速比
=0.25/2.5
=0.1 m/s
需求最低功率
P=F·V
=176N·0.1
=17.6W
电机功率
P电机=P·K/效率
K:安全系数
P=17.6·4/0.75
=94W
选100W
计算减速比
输出轴转速
N=V/πD
=0.1/(3.14·0.082)
=0.38 r/s
=24 rpm
减速比:1400/24 = 58.33
1.电机调速(调压、变频)
2.改变驱动轮直径
链条输送机上的负载重量 M1=50kg
链条输送机输送链条重量 M2=5kg
链条输送机回程链条重量 M3=5kg
链条输送机所用链条重量 M =链条每米重量(kg/m)·长度(m)
链条与滑轨间的摩擦系数 μ=0.2
链条输送机工况安全系数 K=3(小负载 2-3、大负载 4-6)
链条输送机的传动的效率 η=0.75(要综合考虑,给小不给大)
负载在链条输送机上速度 V=0.25m/s
链条输送机所用链轮直径 D=50.1mm
7.步进电机选型与应用 1
步进电机每走一步的步骤
开环控制(步进电机):只管下命令,不管是否完成
一步:静止-加速-匀速-减速-停止
过载:加速-匀速-减速-丢步-停止
闭环控制(伺服电机、混合步进电机):下命令以后,确保任务达成
一步:静止-加速-匀速-减速-停止
过载:静止-加速-匀速-减速-丢步-位置调整-相对静止
80-90摄氏度 正常
超过110-120度的时候,会导致转子消磁,转矩变小。
磁场锁不住转子---丢步
运行时间不超过50%,发热
24H小时:总动作时间不超过12H
步距角
雷赛,鸣志,研控
设置/控制
严格控制脉冲数量--精确位置控制
严格控制脉冲频率--精确速度控制
外加编码器:反馈位置,反馈速度。当出现误差时,可以自动补偿
增量型(用的多、秒表式,便宜)
没有原位
仅限于单圈脉冲控制,多圈控制需要依靠
绝对值型
全行程内,每一个位置都有独立的编码(有范围限定)
最高25位分辨率(2的25次方个脉冲)
精度要求较高
断电要求继续控制
KUKA
机械式(钟表式)
电池+计数寄存器(设备断电)2-3年
韦根计数(磁极旋转,使线圈切割磁感线,产生脉冲)
闭环步进带编码器,但不仅仅是增加了编码器
旋转编码器:绕线机,绕线长度
40/50
光栅尺:直线电机、机床、高精度、成型工艺
步进电机 2相 3相 5相
永磁式一般 2相 步距角7.5°
反应式一般 3相 步距角1.5° 已经被市场淘汰了
混合式
相数:电机定子的线圈组数
2相 1.8°/0.9° 200/400 脉冲数量
3相 1.5°/0.75° 240/480
4相 0.9°/0.45° 400/800 (可以使用2相驱动器)
5相 0.72°/0.36° 500/1000
2相:运行稳定一般,精度一般
5相:精度要求较高,低速运行平稳性要好
8.伺服电机
低速振动、低频振动(与负载无关)
250rpm以下
1.升级成更高相数步进电机
2.升级成伺服电机
3.加减速器:避开低速区
(需求转速输出 200rpm、选择减速比3的减速器,电机600rpm)
4.细分:解决低频振动、提高精度
并没有从根本上大幅度改善步进电机精度
通过步进驱动器控制磁场精确变化
驱动器最大256倍细分
常用 2倍(半步)、4倍(优化低速振动)
4倍是保持精度的极限
4倍以上是无法保证精度
9.步进电机选型与应用 2
三相混合式步进电机1.5°/0.75°
1.2°/0.6°
永磁步进电机 2相
感应式步进电机 3相
半步:两倍细分
256倍细分
细分倍数越多,需要的脉冲频率越高(运算负担)
一般情况下用4倍
步进电机的矩频特性
转矩-脉冲频率 特性
转矩-转速 特性
P=T·N/9550
普遍设计选型时默认步进电机转速为600
普通步进电机常规型号600转以后扭矩急剧下降
高速运转时,如果扭矩下降太多,容易导致丢步
通电情况下。保持扭矩、静扭矩
快速选型:选择对应的保持扭矩,然后取2-5倍安全系数
国际通用:步进电机法兰尺寸 (基座号)
20mm
25mm
35mm
39mm
42mm
57mm
86mm
110mm
130mm
步进电机没有额定功率,一般用机座号形容电机输出能力
,保持扭矩
电机输出能力越强,电机尺寸越大
伺服电机按照功率形容(扭矩、转速)
反向电动势(楞次定律)阻碍电流输出
线圈变化频率越高,反向电动势越大
机身长度
长度越长,低速扭矩越大,对于高速时扭矩增幅不明显
启动相应较快时
机身越长,输出力矩越大,但是衰变的更快,越适合大负载
1500,大电流大电压
电压越大、电流越大=中速性能越好
额定电流,电流越大,中速段曲线越平稳
额定电压,电压越大,中速段曲线越平稳
电流和电压取决于驱动器
RPS 每秒钟转速 10 ·60 = 600rpm
RPM 每分钟转速
1.选静力矩
2.机身长度(是否大负载)
3.选额定电流(是否高于600rpm)
4.选额定电压(是否高于600rpm)
安全系数:弥补偷懒
(少算的效率,少算的负载,少算的力矩衰减)
(工况系数,弥补恶劣运行环境、运行市场带来的负载)
如果说计算好需求扭矩以后,
快速选型方法 T·K(安全系数2-5倍)
精准选型方法 查表 已知转速和最低需求扭矩安全系数1.2-2
步距角
分辨率,每一个脉冲使物体前进的直线距离,电机带动传动机构转一圈 ,传动使负载前进的位移距离
步距角取决于电机结构
两相混合式步进电机 步距角 1.8°/0.9°
360°/1.8° =200 /400脉冲
丝杆导程Pb=5mm
整步:0.025mm/每脉冲
半步:0.0125mm/每脉冲
五相混合式步进电机 步距角 0.72°/0.36°
500 /1000
丝杆导程Pb=5mm
整步:0.01mm/每脉冲
半步:0.005mm/每脉冲
12V
24V
48v
36V
50V
60V
72V
75V
110V
220V
电气工程师调试:
自启动频率 :启动速度超过自启动频率=无法启动,高频振动
减速步进电机
低速大扭矩场合(减速增扭矩)
在需要微动的场合(提高分辨率)
避开低频振动速度范围
低速时提高步进电机刚性或增加自锁性(保持力矩放大)
刹车型步进电机
1.垂直负载,安全考虑(断电刹车)
2.快速刹车
精确定位:闭环控制才是硬道理
防水型:特殊工况:高湿度、高水雾浓度环境下使用
IP65
真空型步进电机:-80°C-200°C 环境温度
丝杆步进电机:模组化设计,节约空,减少设计难度,降低设备复杂程度,安装方便
1.外部驱动式(丝杆直线模组)
2.贯穿轴式(螺母旋转,丝杆固定)
3.推杆式(电动推杆、电缸)
闭环步进电机、混合式伺服电机
30ms
250 rpm
低频振动区
2相步进电机 100 pps- 400pps 30-120 rpm
pps:每秒脉冲数
闭环步进电机、混合伺服电机
伺服电机:高精度、高转速、高响应
3000rpm以下可选闭环步进
1.闭环控制技术。反馈 速度(频率) 位置(数量)
2.较大的提升电机的高速性能
3.发热量较低
4.响应时间较快
5.静止时无振动(开环、闭环步进电机 绝对静止)
6.运行平稳
7.调试简单 伺服电机:调试增益
精度 速度 负载能力 输送距离
丝杆模组
优点:精度高(KK模组),负载大
缺点:行程短(常规不超过1.5m)、速度属于中等(不超过1m/s啸叫)
细长比:50-30 35 长度/直径
同步带模组
优点:行程长 (常规最大4M) 速度快 2M/S
缺点:负载小 精度中等
精度:0.1mmz
齿轮齿条模组
优点:高速、大负载(重载)、超远距离输送(码头设备)
缺点:精度低、磨损快、噪音大
精度:0.2mm
但是:以上模组都可以通过精密调试达到 0.02mm精度(加光栅尺或者磁栅尺)
步进电机选型流程
1.需要确定电机类型:普通电机、步进电机、伺服电机、直驱电机
2.电机配件选择: 步进电机(减速器、闭环、防水、耐热、刹车、丝杆)
根据减速比确定减速器
根据转速与精度要求确定是否闭环
根据使用环境确定是否 防水 耐热
根据负载与输送方向确定是否 刹车(快速停止需求,大负载需求,是否受到负载重力需求)
5000rpm 弹簧式 10000rpm 电磁式
3.相数:根据分辨率选择对应的步距角
普通状态:2相
稍微要求高:3相
精度要求较高:5相
精度要求高:闭环步进
精度要求很高:伺服
4.计算需求转矩
5.确定基座号
6.选择精确的型号(额定电流 额定电压 机身长度及惯量比 单双轴)
7.匹配驱动器
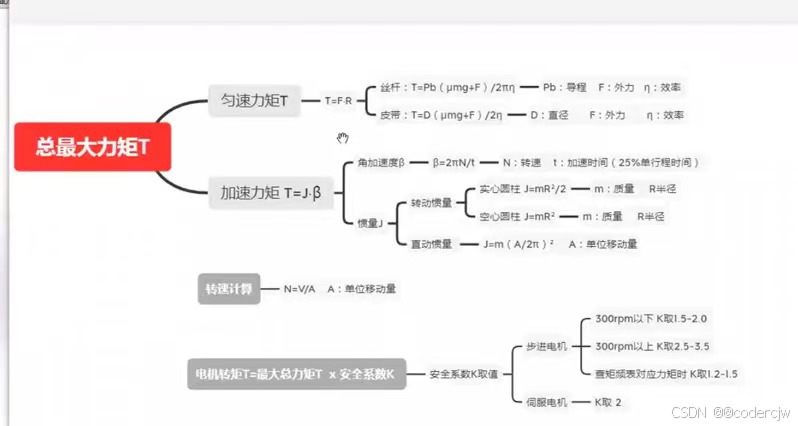
匀速力矩(匀速运动时需要克服的力)
T=F·R
F:摩擦力
R:力臂(带轮半径)
T=Pb(μmg+F)/(2Π效率)
Pb:丝杆导程
μmg:摩擦力
选择导轨的时候会看到对应的摩擦系数
F:外力,来自外部的力(重力,恒力弹簧)
皮带
T=D(μmg+F)/2效率
D:带轮直径
加速力矩
T=J·角加速度
角加速度=角速度/加速时间
角速度=2ΠN
N:转速
角加速度=2ΠN/t
N=V/A
V负载直线速度
A单位移动量,但电机每转一圈时负载直线位移量
皮带传动:A就是带轮分度圆周长
丝杆传动:A就是导程
加速时间t
取定位时间(就是节拍)的25%来作为加速时间
步进电机加速时间一般是:0.1s-1s
伺服电机加速时间一般是:0.05s-0.5s
普通电机加速时间一般是:3-5s
转动惯量: J=mR^2/2 单位:kg/m^2
m转动的负载质量 (先确定材料,再点击“质量”-“评估属性”,那么质量就出来了。)
R回转体的半径
直动惯量: J=m(A/2Π)^2
A单位移动量,但电机每转一圈时负载直线位移量
皮带传动:A就是带轮分度圆周长
丝杆传动:A就是导程
m负载质量
10.丝杆模组中步进电机的选型计算:
负载速度: 0.2 m/s
滑动负载: 15kg
丝杆长度: 0.5m
丝杆直径: 0.02m
丝杆导程A: 0.02m
摩擦系数: 0.1
移动距离: 0.42m
机械效率:0.9
定位时间:2.6s
加减速时间t:0.2s
外力:0
移动方向与水平夹角:0
丝杆密度:7900 kg/m^3
分辨率(精度):0.05 mm/step
步距角计算
步距角=(360°·分辨率)/单位移动量
=(360°*0.05mm)/20mm
=0.9°
两相混合式步进电机 1.8°/0.9°
转速计算
转速=负载速度/单位移动量
N=V / A
N=0.2/0.02
N=10 rps (每秒的转速)*60s
=600rpm
匀速力矩计算
T=Pb(μmg+F)/(2πη)
=(0.02*0.1*15*10+0) / (6.28*0.9)
=0.3 / 5.652
=0.053N·M
加速力矩计算
角加速度β计算
Β=(2πN)/t
=(2*3.14*10)/ 0.2
=314 rad/s^2
总惯量计算(总惯量 = 直动惯量 + 转动惯量)
直动惯量(随着电机旋转而做直线运动的部件)
J直=m(A/2π)^2
=15(0.02/2*3.14)^2
=1.5*10^- 4 (kg/m^2)
转动惯量
丝杆质量计算(不用带丝杆螺母一起算)
质量=体积·密度(不想算质量,那么就设定材料,再点击sw里面的评估, 质量属性)
=R2π·L·ρ
=1.24kg
J丝=mR2/2
=(1.24*0.012) /2
=6.2·10^-5
总惯量J=J丝+J直
=15*10^-5 + 6.2*10^-5
=21.2*10^-5 (kg/m^2)
加速力矩T=J总·β
=21.2·10-5 *314
=0.066N·M
理论力矩T=T加+T匀
=0.066+0.053
=0.119 N·M
因转速为600rpm,K值取3
电机力矩T=T理·K
=0.119*3
=0.357 N·M
约等于0.4 N·M
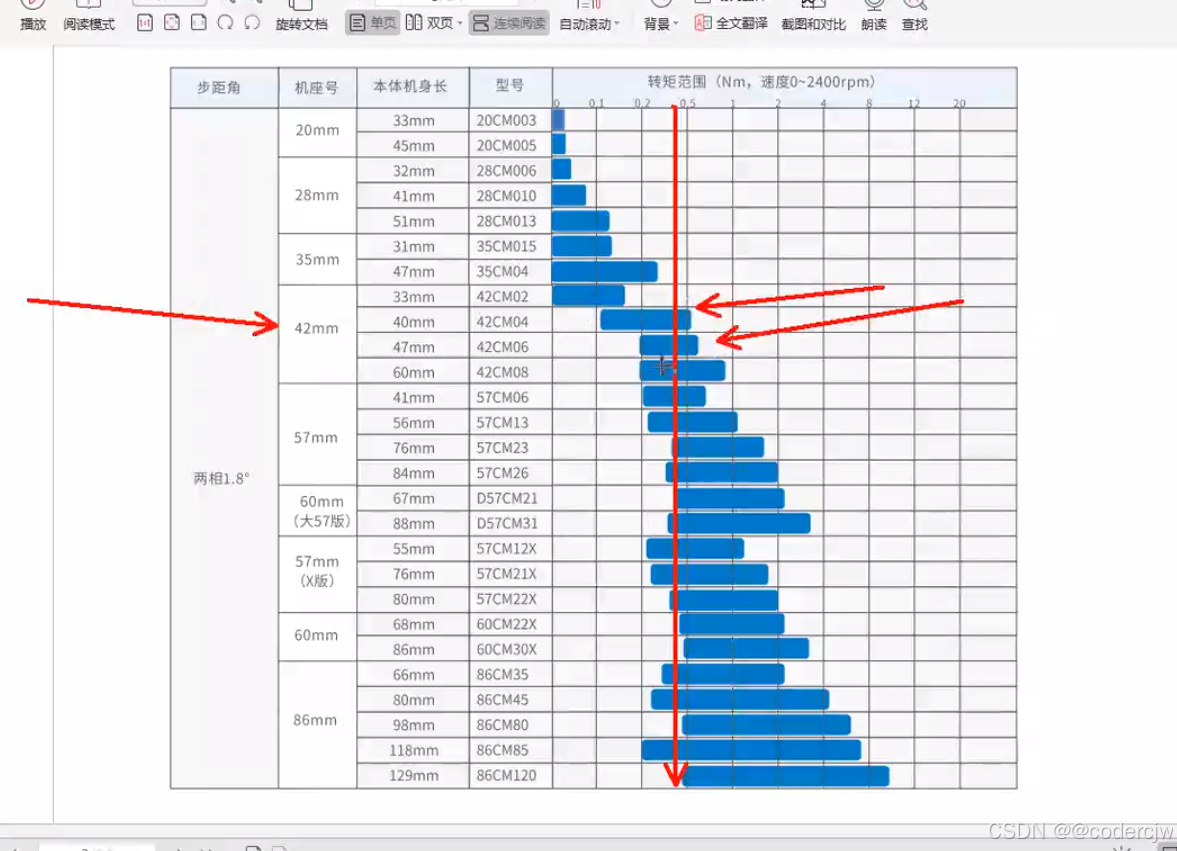
查雷赛步进电机的选型表可以知道,选择42的步进电机。

惯量比计算 尽量控制在30以内
负载惯量(总惯量)/转子惯量(查上表可知)
21.2*10^-5 /0.72·*10^-5 = 29.5
惯量比刚好满足30,所以我们选机身长为47这款
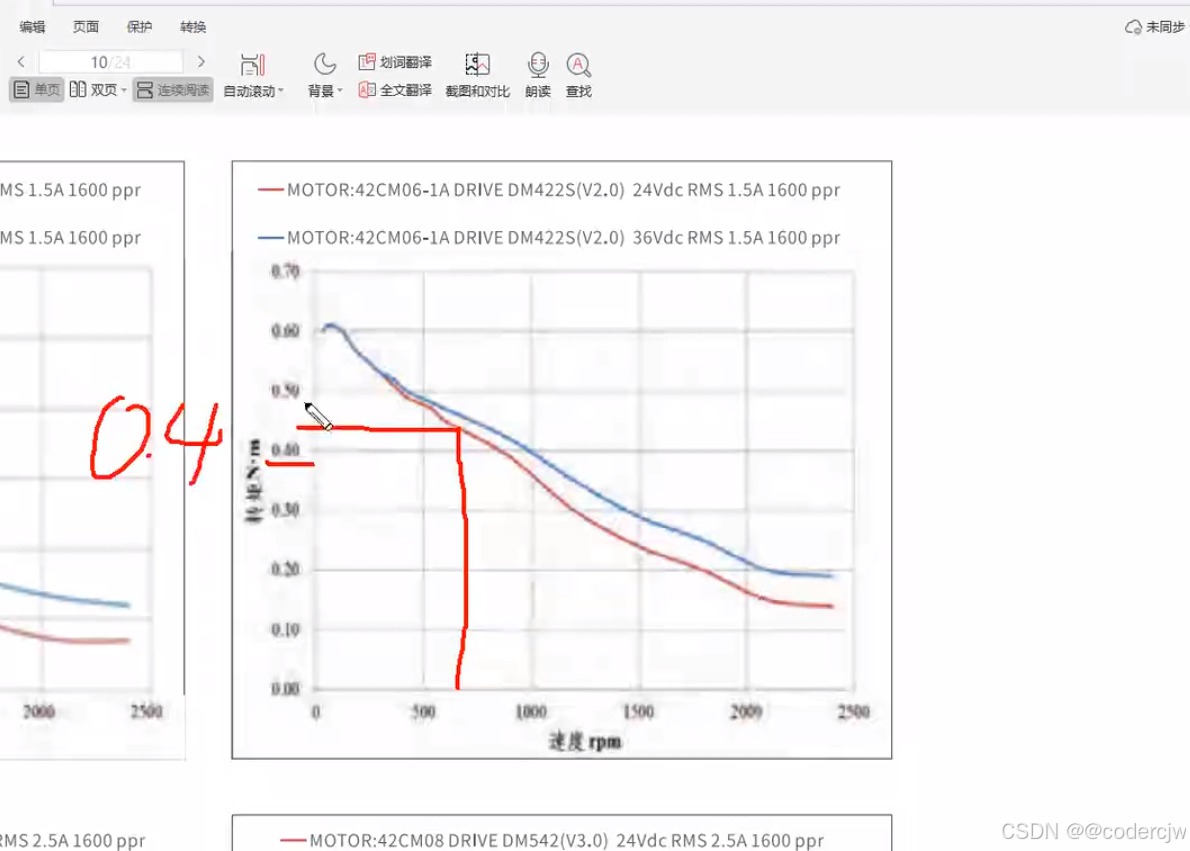
42CM06-1A这款在600转时满足0.4NM的扭矩,所以我们选择这款,而且42CM06-1A比42CM06的电流小,价格便宜一些。
最终选择步进电机型号:42CM06-1A
驱动器型号:DM422S(V2.0)
11.同步带模组中步进电机的选型计算:
负载速度: 0.5 m/s
滑动负载: 25kg
同步带型号:5M (齿距、节距、模数)
同步轮齿数:25
同步轮分度圆周长 :25·5=125mm
同步轮质量:0.5kg
摩擦系数: 0.1
重载摩擦系数较大 0.1
轻载摩擦系数较小 0.05
预压:摩擦系数很大0.2
(恒定的阻力 15N)
移动距离: 0.8m
机械效率:0.9
定位时间:2.6s
加减速时间:0.1s
外力:0(运动方向的受力)
移动方向与水平夹角:0
分辨率:0.5 mm/step
步距角计算:
同步轮分度圆周长25·5=125mm
单位移动量=125mm
步距角=(360°·分辨率)/单位移动量
=(360°·0.5mm)/125mm
=1.44°
2相步进电机:1.8°/0.9°
转速计算:
N=V/A
转速=运行速度/单位移动量
=0.5 / 0.125
=4 rps(转/秒)*60s
=240 rpm(转/分钟)
减速比i:600rpm/240rpm
I=2.5
匀速力矩计算:
同步轮半径 = 周长/2π
=125mm/6.28
=20mm
匀速力矩:
T匀=F·R/η
=摩擦力·半径/效率
=(μmg)·R
=(0.1·25·10)·0.02 / 0.9
=0.55N·M
转动惯量:
J转(同步轮的惯量)
=mR^2/2
=0.5kg·0.0004 / 2
=1·10^-4 kg·M^2
J转=1·10^-4 * 2(因为有2个同步轮)
=2·10^-4 kg·M^2
直动惯量:
J直=m(A/2π)^2
=负载质量(单位移动量/2π)^2
=25kg·(0.125M/6.28)^2
=99·10-4 kg·M^2
角加速度β=2πN / t
=2π·转速(rps)/加速时间
=6.28·4 / 0.1
=251.2
T加=J总·角加速度β
=(J转+J直)·β
=101·10^-4·251.2
=2.53 N·M
T电机=(T匀+T加)·K安全系数(240转取2)
=(0.55+2.53)·2
=3.08 ·2
=6.16 N·M
T电机=T电机 / 减速比
=6.16/2.5
=2.464 N·M
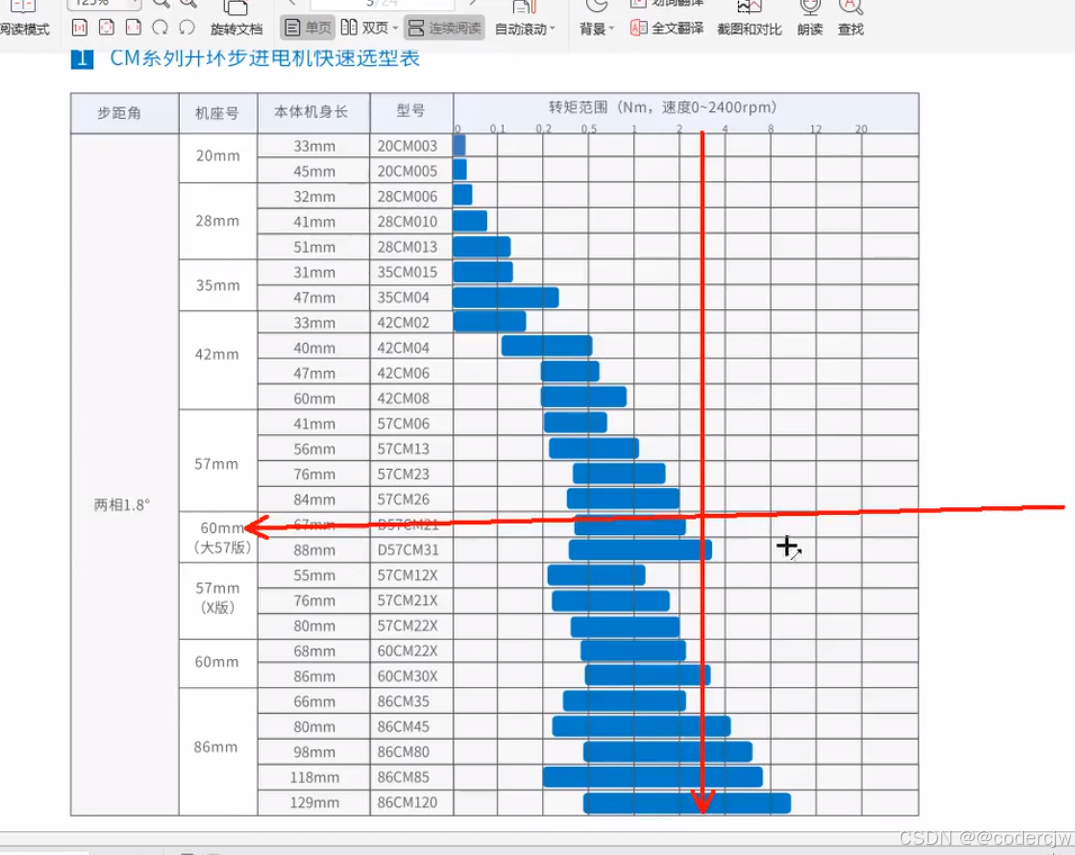
查表,选大57版电机
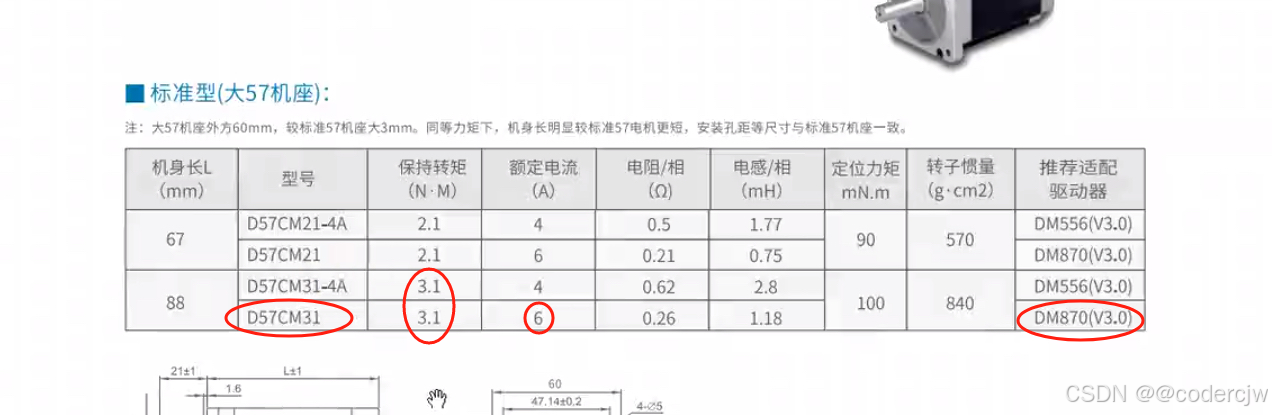
因为有600转,选额定电流大一点的,扭矩好一些,所以就选了红色这个,步进电机没有必要,
至于惯量比,一般步进电机懒的看惯量比。
步进电机:D57CM31
驱动器:DM870(V3.0)
12.齿轮齿条模组中步进电机的选型计算:
预估电机质量:2kg
负载质量:20kg
负载运行速度:0.314 m/s
齿轮分度圆直径:100mm
齿轮厚度:40mm
齿轮密度:7900 kg/m^3
齿轮质量:2.48kg
齿轮齿条传动效率:0.95
摩擦系数:0.1
定位时间:5s
加速时间:0.2s
需求分辨率:0.5 mm/step(客户提供/设备工艺决定)
P=TN/9550Kw
步距角计算
单位移动量=Π·分度圆直径
= 3.14 * 100MM
= 314mm
步距角=(360°·需求分辨率)/单位移动量
=(360 * 0.5mm/step)/ 314mm
=0.57°
用两相混合式步进电机(四倍细分)
0.45°
齿轮转速计算
转速=运行速度/单位移动量
N=V/A
=0.314M/S / 0.314 M
=1 RPS * 60S
=60 rpm
减速比i=电机转速/齿轮转速 (因步进电机的矩频特性最佳运转速度在300-600之间)
=300/60
=5
匀速转矩
T匀 = F·R/ η = 24.48 * 0.05M / 0.9 = 1.36 N·M
F匀速运行时的摩擦力F = μmg = 0.1 * 10 * (2+20+2.48)= 0.1 * 10 * 24.48 = 24.48 N
加速转矩计算
T加=J总·β
角加速度β=2ΠN/t
=6.28 * 1RPS / 0.2S
=31.4
转动惯量计算
J齿轮 = mR^2/2
=2.48kg *0.05m*0.05m / 2
=31·10-4 kg.m^2
直动惯量
J负=m(A/2Π)^2
=24.48kg(0.314 m/s / 6.28)^2
=612 * 10^-4
总惯量
J总 = J负+J齿 = 643·10^-4
T加=β · J总
=31.4 * 643·10^-4
=2.01 N·M
理论力矩T=1.36+2.01
=3.37
3.37 * 2 (安全系数)= 6.74 N·M
6.74/减速比=电机力矩
6.74/5=1.348 N·M

选57的步进电机就可以了,机身长76或者84就可以了。
一般选步进电机不用看惯量比,如果要计算惯量比:
(1)负载惯量(总惯量)/ i^2 = 电机负载惯量
(2)电机负载惯量 / 转子惯量(查电机选型表可知)= 30以内
13. 伺服电机1
高精度、高速度、高响应速度
步进电机:适用于精确定位,不适用于动力(效率低)不适用于力矩控制
伺服电机:可精确定位、可力矩控制、可取代变频电机做动力输出
伺服电机分类
直流伺服电机:碳刷直流电机、无刷直流电机
大扭矩、启动扭矩、高响应速度
小型加工设备(火花机)、AGV
交流伺服电机:交流永磁同步伺服电机、交流感应异步伺服电机
交流永磁同步伺服电机:应用最广泛的、中低速运行平稳、反复启停工况
交流感应异步伺服电机:高速性能优良、低速运行不稳定、高速重载、主轴电机
光栅尺:精度可以达到5微米,相当于伺服电机的编码器
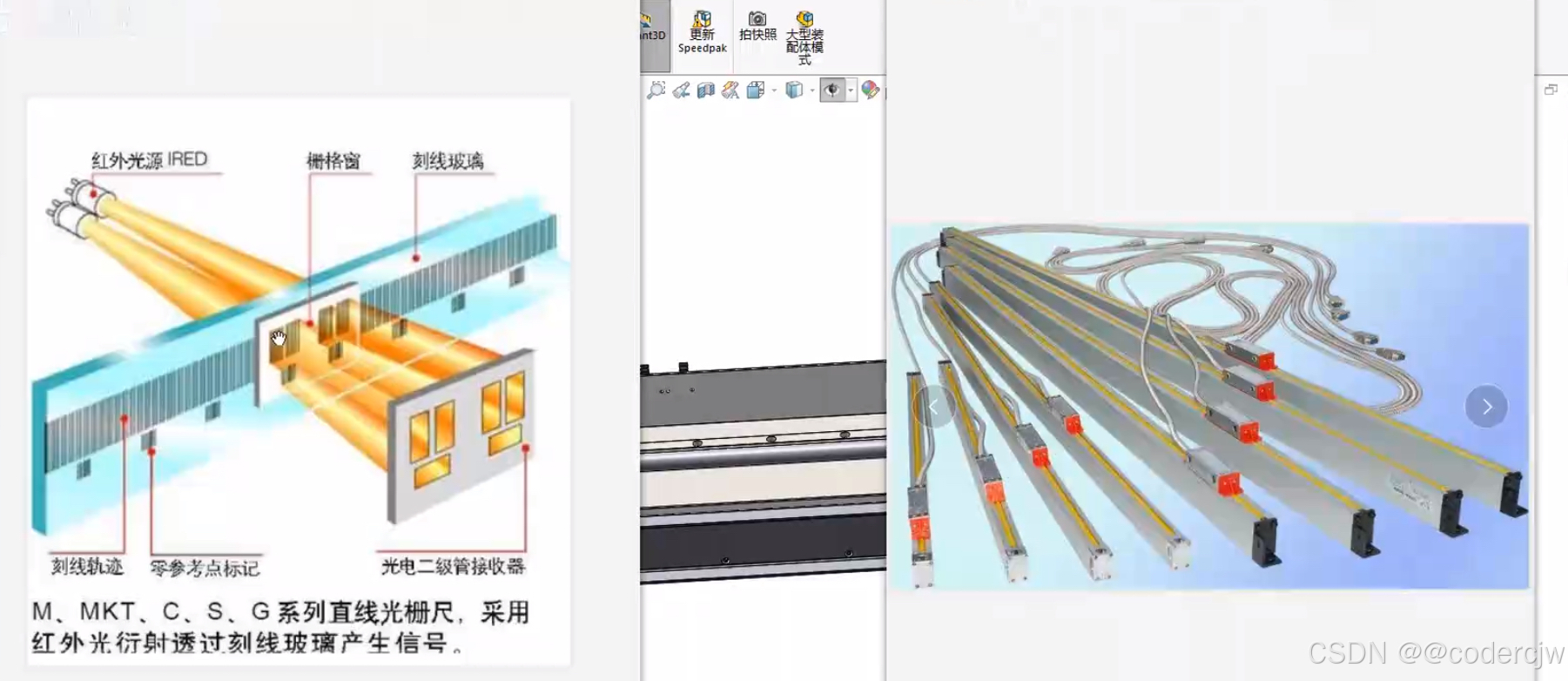
为啥有了伺服电机,还要有光栅尺,因为在模组里面,伺服电机只带动模组转动,至于模组上面的负载移动到了哪里,伺服电机是不知道的,所以需要光栅尺。
光栅尺安装:

3.伺服电机的分辨率
取决于编码器的位数(13位17位20位23位)
4.脉冲当量(分辨率)
根据编码器的分辨率
每走一个脉冲位置的时候,滑台的直线位移距离
转矩控制
恒力矩输出(模拟量控制)
比如:设定输出 5N·M
外力:2N·M 继续旋转
外力:5N·M 停止、匀速旋转
外力:10N·M 反转(按照外力的方向)
主要:材质受力有严格要求的产品收料、缠绕
绕线机、拉光纤、打螺丝、紧瓶盖
转速控制
恒转速输出 脉冲控制、模拟量控制
编码器反馈转速,输出力矩为确保转速而调整
位置控制
1.点对点位移:A点位移到B点 (过程不在乎)
对驱动器的运算负载不算大
2.稳定转速位移(转速恒定,位置控制精确。对驱动器的计算量负担很大)
全闭环控制
1.下位机运算速度较快(运动控制卡)
2.加光栅尺(反馈给下位机)
3.下位机配合光栅尺控制位置精确、编码器配合驱动器进行转速控制
驱动器温度过高---跳闸
1.加风扇 (对外吹、抽风)
2.加风扇(穿堂风)
3.加空调
伺服电机发热(电流过大报警--性能下降--烧电机)
1.过载
2.高频启停
3.驱动输出高电压 过压
4.驱动输出低电压(电流过高) 过流
5.缺相(匝间短路)
换大电机
加风扇
伺服电机的刚性增益
刚性:抵抗外力的能力
增益:伺服电机对于外部影响的控制能力(提升伺服电机性能)
(伺服控制系统对于系统变化而纠正的响应速度及幅度)
运行过程中啸叫:速度模式增益
停止的时候啸叫:位置模式增益
电机噪音:过度增益、缺相、轴承异响
急加速急减速,高速定位机构
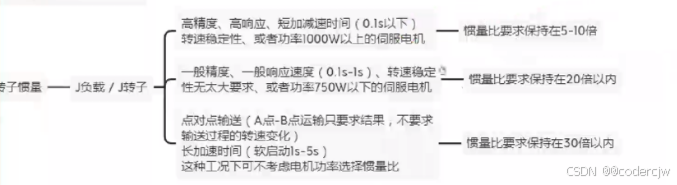
惯量比:
负载惯量/转子惯量
转子惯量越大——电机输出能力越大
惯量比越小——电机输出能力越稳
加减速机的目的:增加传动系统的刚性
惯量比:
5倍以内:高响应、高精度、高转速
高速贴片机、点胶机、加工设备
20倍以内:车削机
30倍以内:移栽手、输送机、慢加速工况
惯量比选大了,那么电机容易发热,出现各种问题
减速机的作用:
负载惯量:10·10^-4
转子惯量: 1·10^-4
惯量比:10
电机额定转速3000
电机输出力矩10N·M
加个减速机 减速比i=2
那么电机转速就要变成 6000
电机转矩就会减半,变成 5 N·M
减速机的转速就是 3000
加了减速机后的转矩为10N·M
有减速机构的时候
惯量比=(负载惯量/i2)/ 转子惯量
=(10 / 4) / 1
惯量比变成了2.5
总结:加了减速机,惯量比减小,电机输出能力和刚性增加了。
选型流程:
- 确定工况是否需求执行电机
- 电源性质(交流、低压直流)
- 工况分析(垂直、水平、倾斜)(滚动摩擦、滑动摩擦、静摩擦)
- 力学分析计算
- 外挂件需求(刹车、磁粉制动器、编码器)
- 安装方式(法兰、基座、传动、安装空间)
- 校核:尺寸、型号、负载、功率
- 驱动器
14.丝杆模组中伺服电机的选型计算:
丝杆长度L1:0.59 M
丝杆行程L2:0.51 M
螺母长度L3:0.19 M
丝杆直径D:0.016 M 半径:0.008
丝杆导程Pb:0.01 M
丝杆密度ρ:7900 kg/m3
负载质量M:20kg
负载运行速度V:0.2 m/s
负载定位时间:1.7 s
加速时间t1:0.1 s
匀速时间t2: 1.5s
减速时间t3: 0.1s
负载运动距离:0.33 M
摩擦系数μ:0.1 (导轨、直线轴承)
机械效率η:0.9
外力大小F:0
安全系数k:1.5
联轴器惯量J联:0.1·10-4 kg·M^2
伺服电机不计算分辨率(因为哪怕是最差级别的编码器,都有13万个脉冲)
丝杆参数计算
丝杆横截面积=(πD^2)/4
=(3.14·0.016^2)/4
= 0.0002 m^2
丝杆体积=面积·长度
=0.0002·0.59
=0.000118
丝杆质量=体积·密度(直接在sw里面电机点击评估--质量属性--就可以了)
=0.000118·7900
=0.93 kg ≈1 kg
转速及角加速度计算
丝杆转速=运行速度/导程
= 0.2 / 0.01
= 20 rps* 60S
=1200 rpm(转/分钟)
角加速度=2πN/t
=2·3.14·20 / 0.1
=1256 rad/s^2
惯量计算
1. 直动惯量J=M(Pb/2π)^2
=20(0.01/6.28)^2
=0.5·10^-4
2. 转动惯量J=(M·R^2)/ 2
=(1·0.0082)/2
=0.000032
=0.32·10^-4
惯量单位换算:1 Kg·cm2 =10-4kg·M^2
3. 总惯量=J直 + J转 +J联
=0.92 ·10^-4 kg·M^2
力矩计算:
1. 匀速力矩 T=(μmg·Pb)/ (2πη)
=(0.1·20kg·10·0.01)/(6.28·0.9)
= 0.035 N·M
2. 加速力矩 T=角加速度·总惯量
=1256·0.92·10-4kg·M2
=0.115 N·M
3. 电机力矩 T=(T匀+T加)K
=0.15·1.5
=0.225 N·M
查表可知,100w伺服电机就可以了。
负载惯量(总惯量):0.92 ·10-4kg·M^2
转子惯量:0.041·10-4 kg·M^2
惯量比: 0.92/0.041=22.4
我们希望惯量比在5倍以内
0.92/5 > 0.184·10-4 kg·M^2 被选电机的惯量应该大于0.184·10-4 kg·M^2
所以我们选择下面这台电机
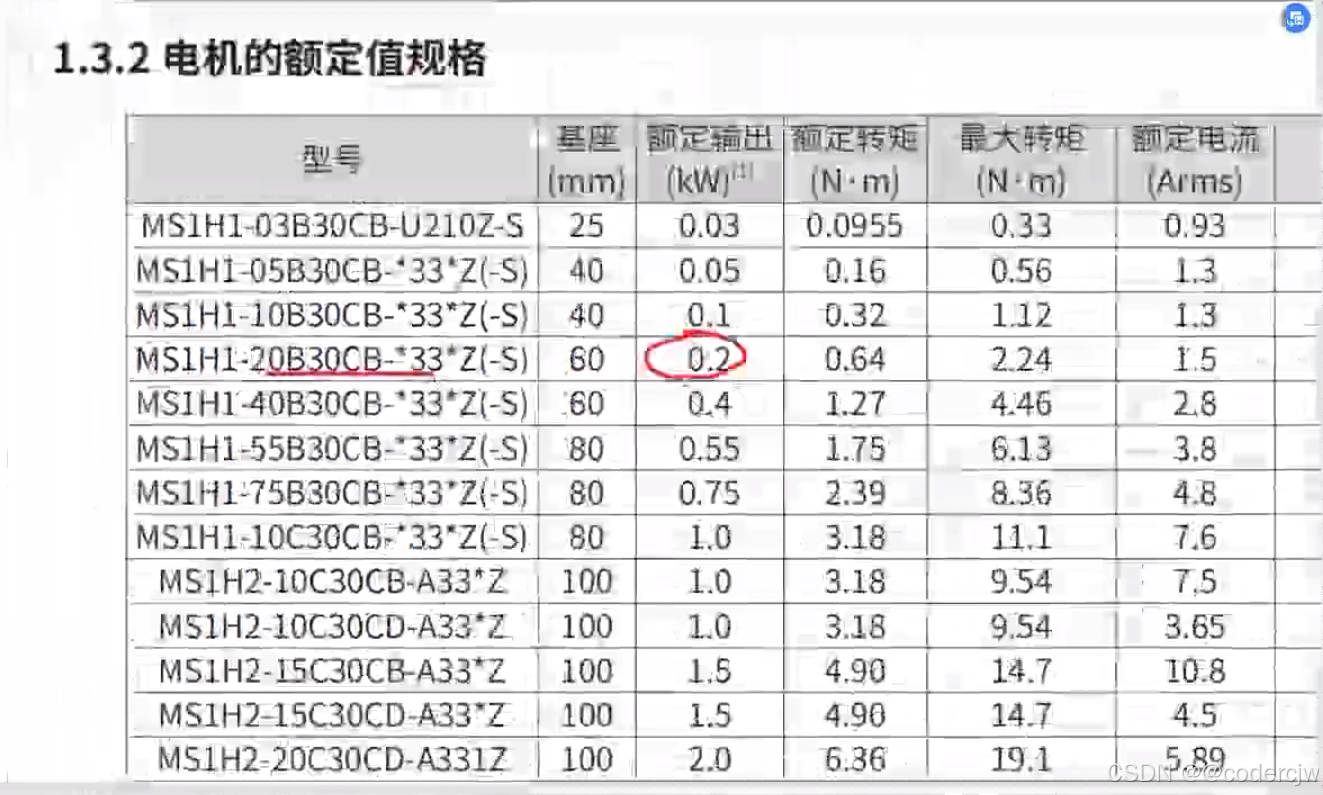
选择200W伺服电机
先算扭矩,再算惯量,两者都要看,而且都要符合条件才行。
15.同步带模组中伺服电机的选型计算:
同步带质量M0 0.5kg
负载总质量M1 3.5kg
同步轮质量M2 0.5kg
同步轮直径D 0.05m
负载运行速度V 1.0m/s
负载定位时间t0 1.0s
电机加速时间t1 0.1s
电机匀速时间t2 0.8s
电机减速时间t3 0.1s
负载移动距离L 0.9m
摩擦系数μ 0.1
机械效率η 0.8
外力 0
安全系数K 1.5
1、同步轮参数计算
(1)同步轮的周长
L=πD=3.14*0.05m
= 0.157(m)
单位移动量=0.157(m)
2、惯量计算
转动惯量
J同步轮=(MR^2)/2=0.5kg*0.025^2m /2 = 1.56x10-4 kg·m^2
直动惯量c
J = M(A/2π)^2
= 3.5( 0.157 / 6.28)^2
= 21.8x10^-4 kg·m^2
总惯量
J总 = 2x1.56x10^-4 + 21.8x10^-4 = 24.92x10^-4 kg·m^2
同步轮的转速
N 同步轮 = 负载运行速度V / 同步轮周长
= 1 / 0.157
= 6.4r/s*60S = 382 r/min
同步轮的角速度
ω=2πXN = 6.28x6.4=40.2 rad/s
同步轮的角加速度
β=ω/t =40.2/0.1
=402 rad/s^2
匀速扭矩
同步轮半径 = 周长/2π
=157mm/6.28
=25mm
T匀=F·R/η
=摩擦力·半径/效率
=(μmg)·R
=(0.1·3.5·10)·0.025 / 0.8
=0.11N·M
加速扭矩:
T=(J总 x β) = (24.92x10^-4 kg·m^2 x 402)
=1 N·M
电机扭矩:
T电机 = (T匀速+T加速) X1.5=(0.11+1 ) x 1.5
= 1.665 N·M
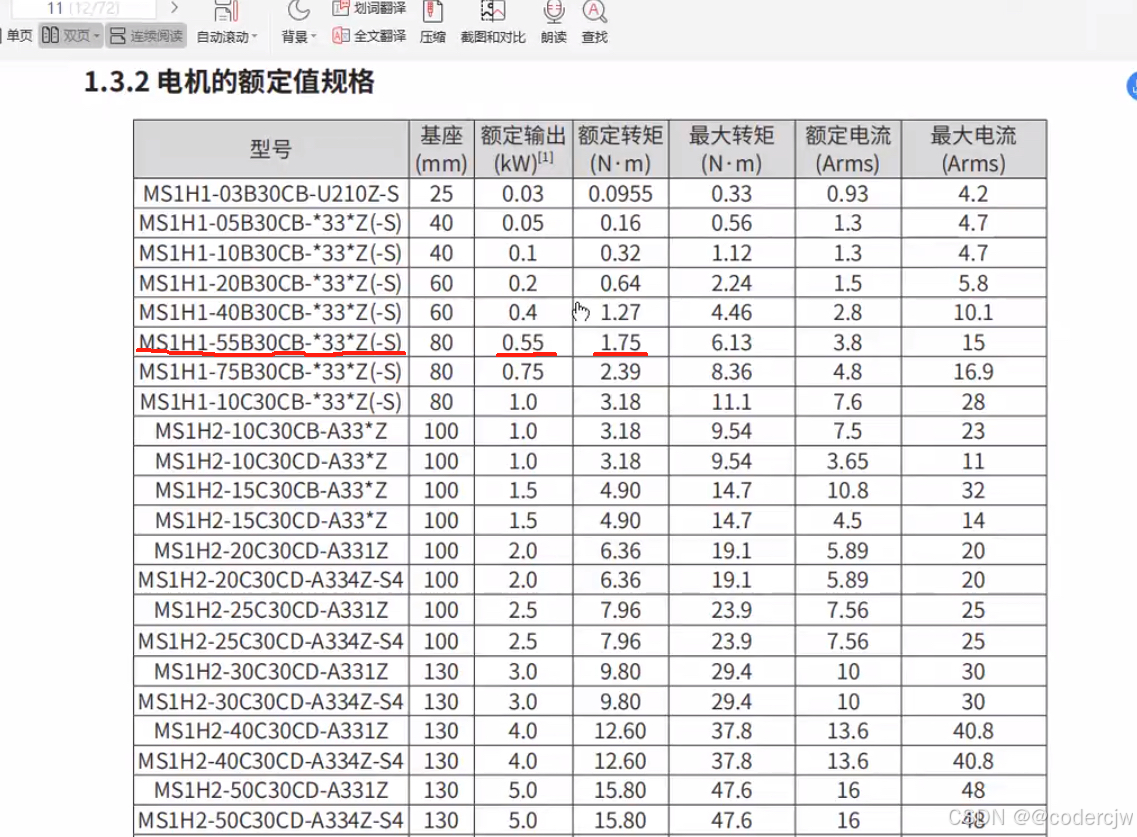
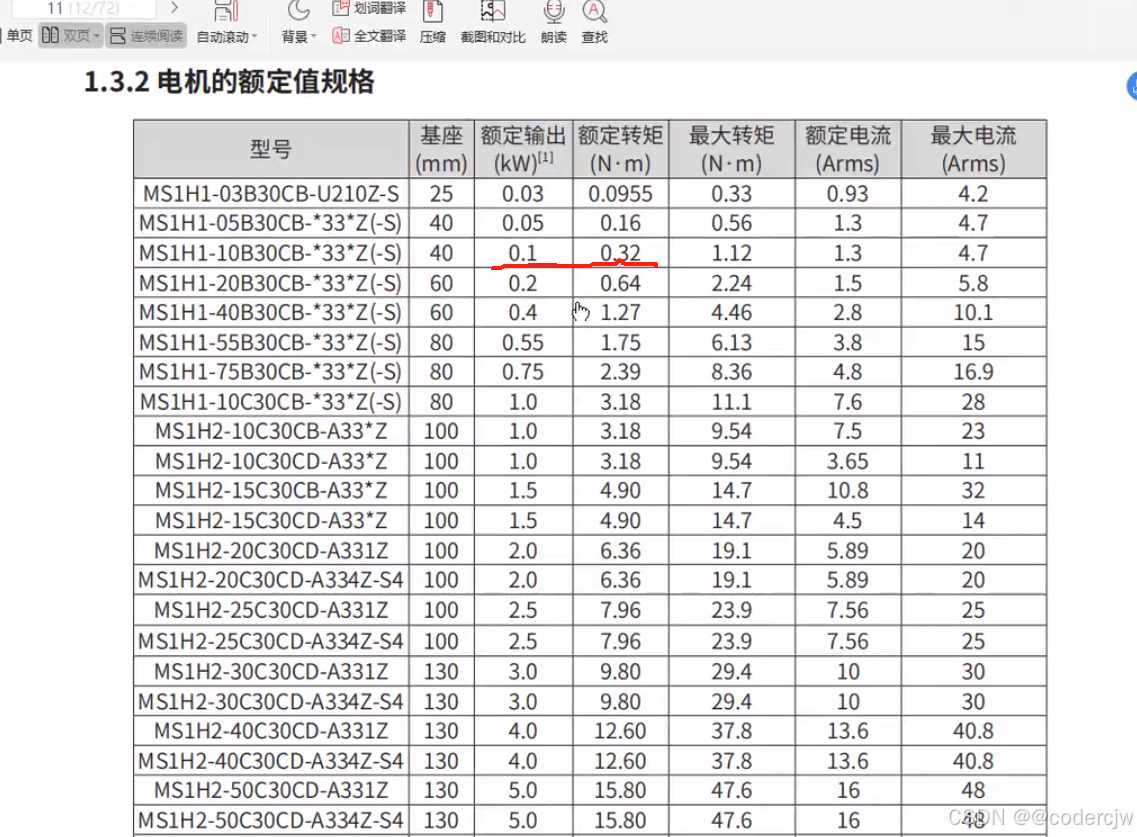
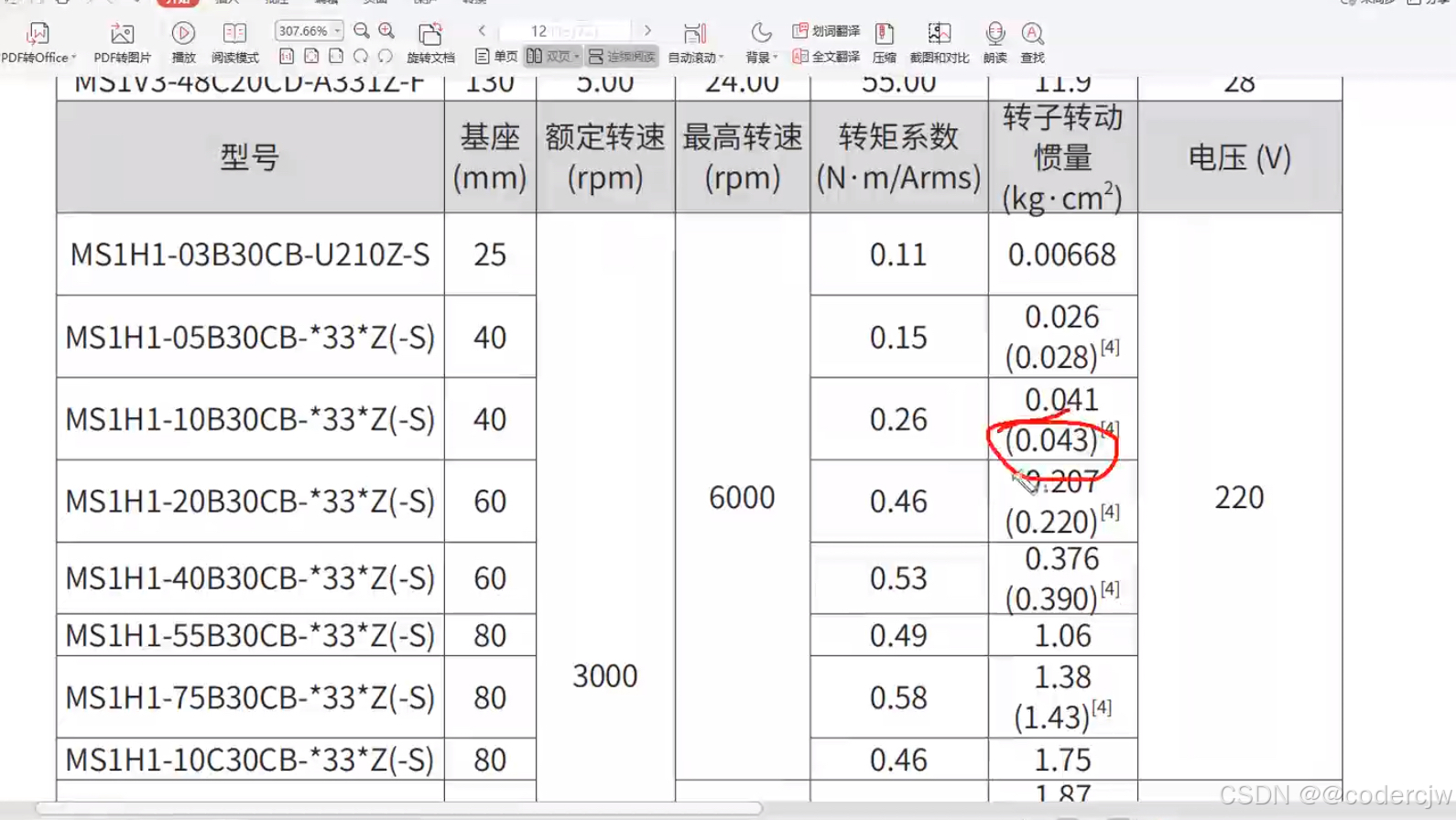
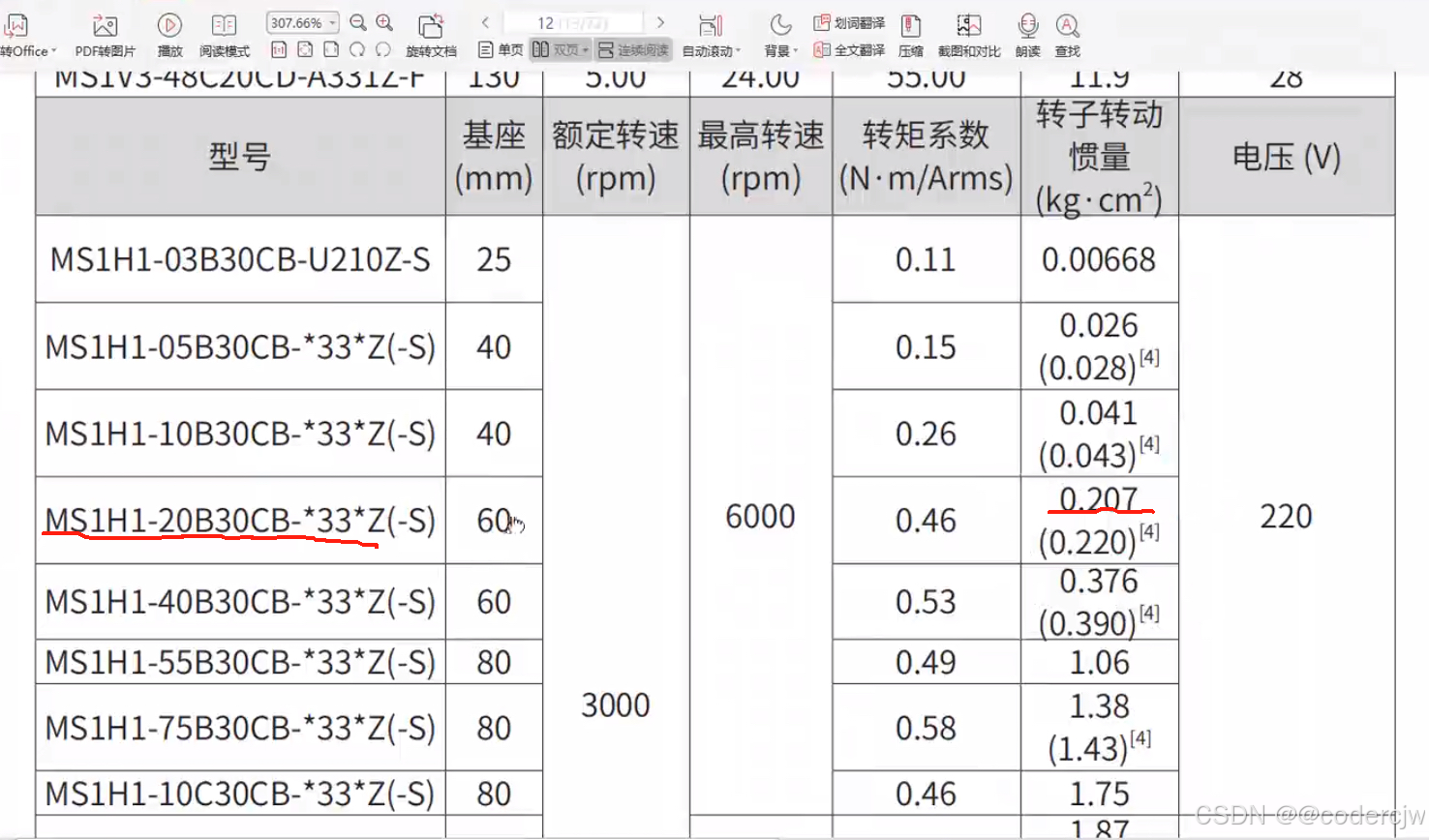
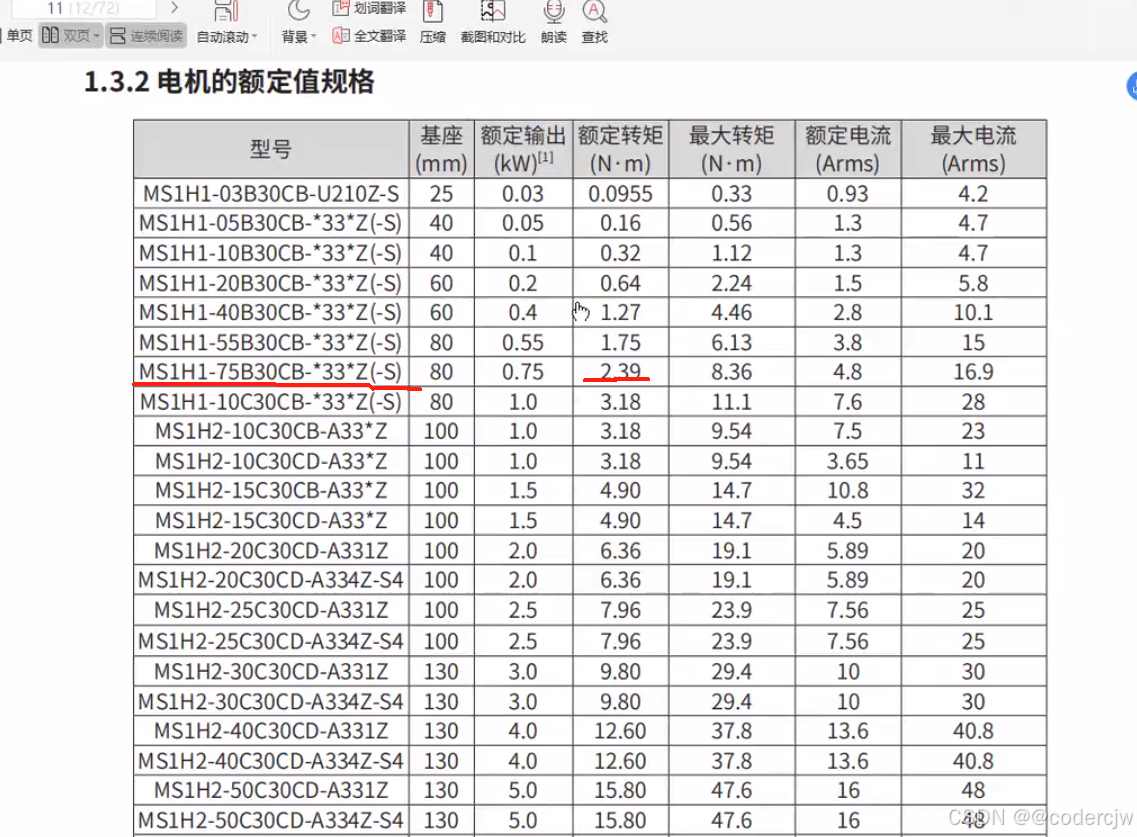
查表选择550w电机
我们希望惯量比在30倍以内
24.92x10^-4 kg·m^2/30 > 0.83·10-4 kg·M^2 被选电机的惯量应该大于0.83·10-4 kg·M^2
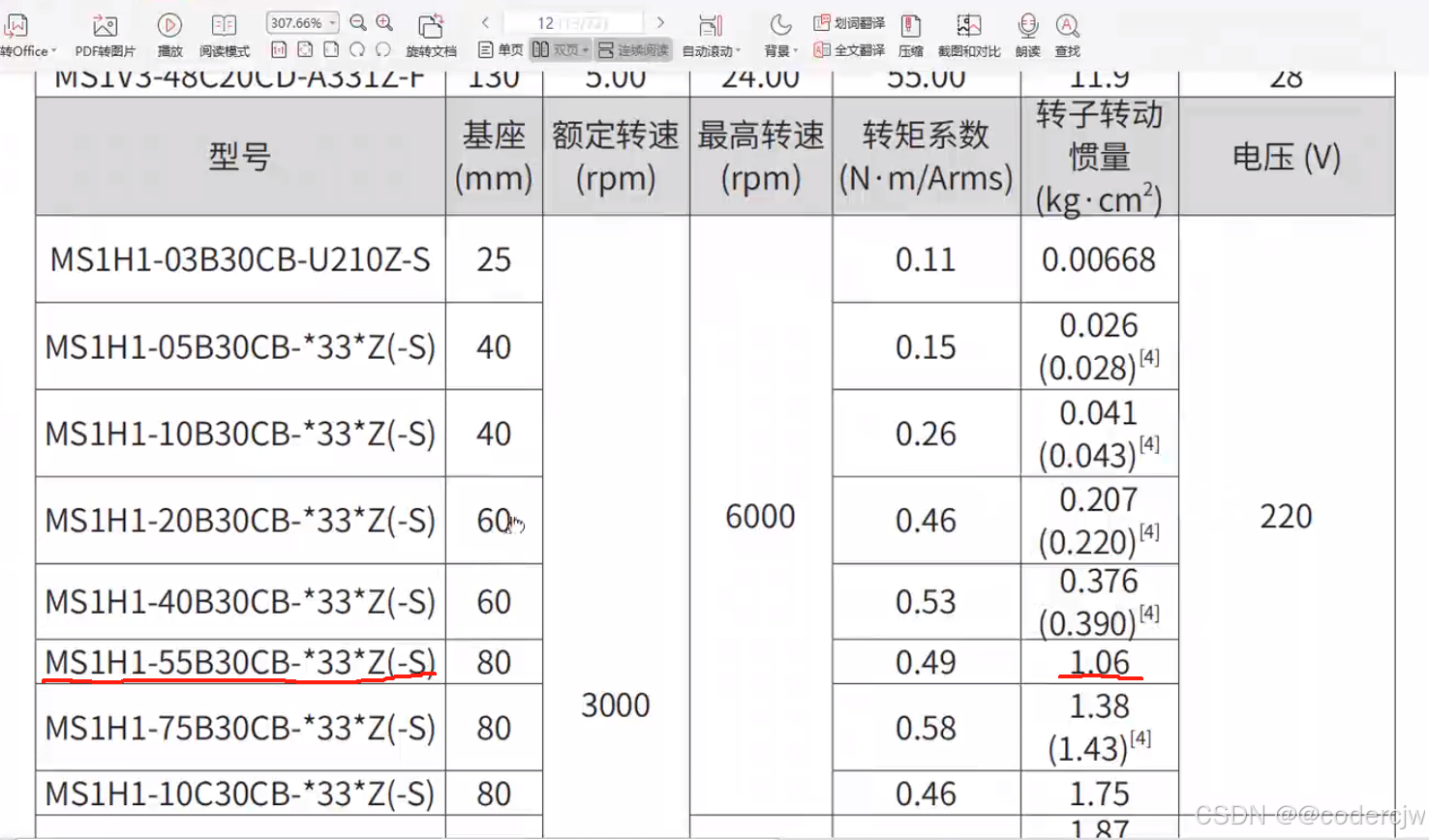
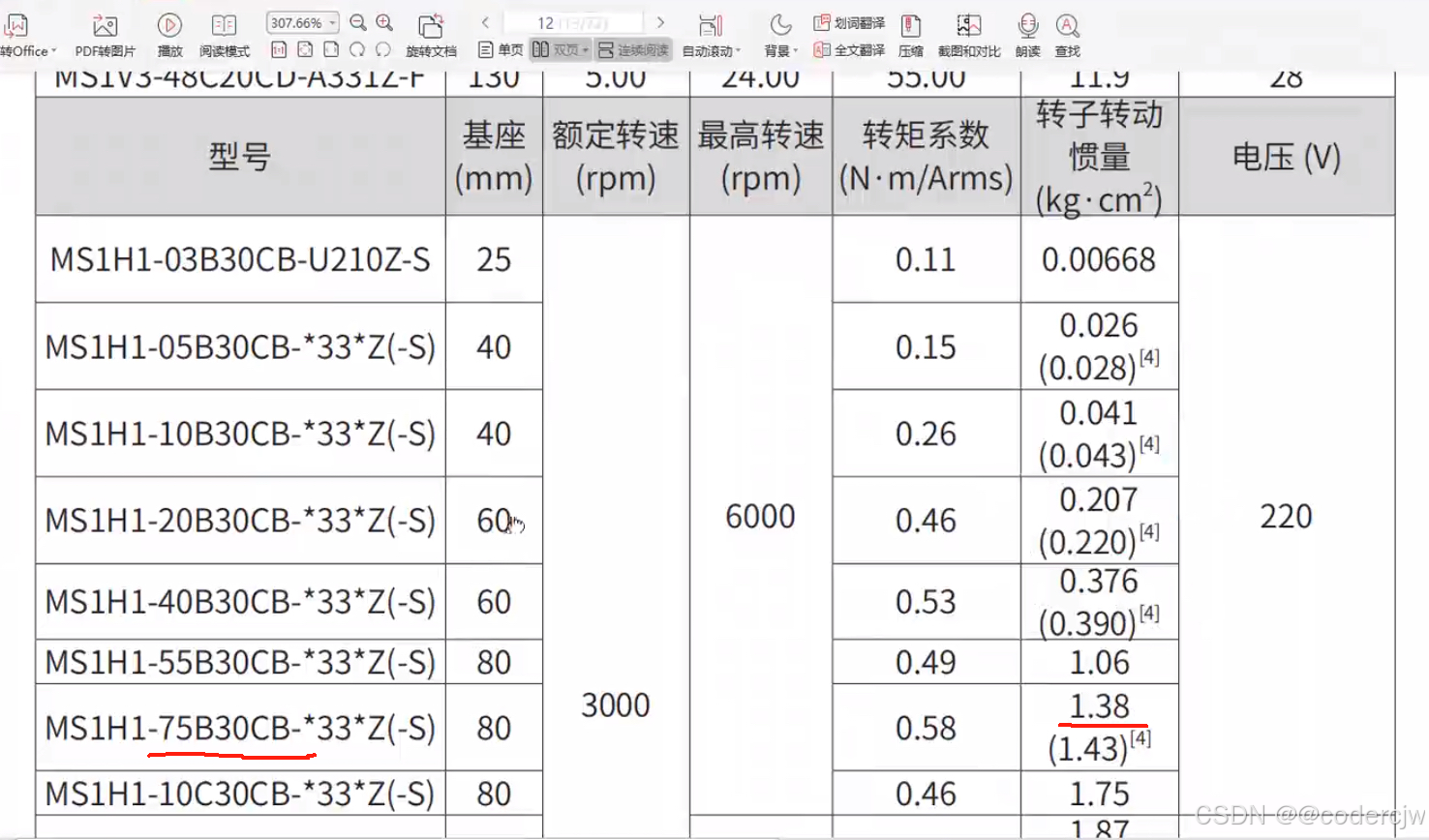
我们最终还是选择了这台55B30CB电机
需要的最低转速为382 r/min,也就是说额定转速为3000转可以加一个减速比为5的减速机,那么
扭矩:1.665 N·M / 5 = 0.333 N·M
惯量比: 24.92 x 10^-4 kg·m^2/25/30>0.033 x 10^-4 kg·m^2
查表得出,200W电机就可以了。
16. 齿轮齿条模组中伺服电机的选型计算:
齿轮分度圆直径 D 0.052m
齿轮的厚度H 0.034m
齿轮的密度ρ 7900
齿轮质量M1 0.57kg
电机质量M2 2kg
负载质量M3 40kg
齿轮齿条传动效率 0.95
摩擦系数 0.1
定位时间t1 2s
加速时间t2 0.1s
减速时间t3 0.1s
匀速时间t4 1.8s
齿条总体长度L 1.45m
负载运行速度v 0.75m/s
安全系数K 1.5
1. 计算齿轮质量(直接在sw里面点击评估--质量属性--质量,就可以得到这个齿轮的质量了。
M = p V
= 7.9·103x0.00007216976
= 0.57 kg
齿轮周长: 0.052m x 3.14 = 0.16328m
2. 计算齿轮转速
n= 负载速度V / 齿轮周长
= 0.75 / 0.16328
= 4.6 r/s X 60S
= 276 r/min
伺服电机转速为3000r/min, 那么减速机的减速比为3000/276 = 10.8,可以安装一个减速比为10的减速机。
转动惯量:
J齿轮 = mR^2/2
=0.57kg *0.026m*0.026m / 2
=31·10-4 kg.m^2
直动惯量:
单位移动量=Π·分度圆直径 = 3.14 X 52 mm = 163.28mm= 0.163m/s
J直动惯量= m(A/2Π)^2
= 42.57kg(0.163m/s / 6.28)^2
= 287* 10^-4 kg·m^2
总惯量:转动惯量+直动惯量 = 31·10-4 kg.m^2 + 287* 10^-4 kg·m^2 = 318 * 10^-4 kg·m^2
匀速扭矩计算:
T匀 = F·R/ η = μmg x R / η =( 0.1 x 42.57kg x 10 x 0.026m ) / 0.95 = 1.1 / 0.95 = 1.16NM
加速扭矩计算:
角加速度:
β=2ΠN/t
=6.28 * 4.6 RPS / 0.1S
=288.9
T加=β·J总
= 288.9 * 318 * 10^-4 kg·m^2
= 9.18 NM
总扭矩:匀速扭矩+加速扭矩=9.18+1.16 = 10.34NM
10.34x2(安全系数) = 20.68 NM
装上10比的减速机,那么扭矩为20.68/10 = 2.068NM
查表的选择750w电机。
惯量比30就可以了,负载惯量/i^2/30 = 318 * 10^-4 kg·m^2/ 100/30 = 0.106 * 10^-4 kg·m^2
750w电机没问题。
圆盘类传动
凸轮分割器
DD马达(力矩电机)
气动分度盘
电机直驱
电机加减速机
中空旋转平台
17. 伺服电机直驱分度盘
转盘的直径 D1: 0.5m
转盘的厚度:H1: 0.015m
载具的数量:16pcs
联轴器惯量:0.1*10^-4 kg·M^2
转动一次时间:0.5S
加速时间:0.1S
减速时间:0.1S
匀速时间:0.3S
安全系数:1.5
圆盘直径(最大不超过1M):圆盘厚度 = 30到40

转盘(6061铝合金)质量:7.9kg(评估-质量属性)
转盘(6061铝合金)惯量:0.244 kg·M^2
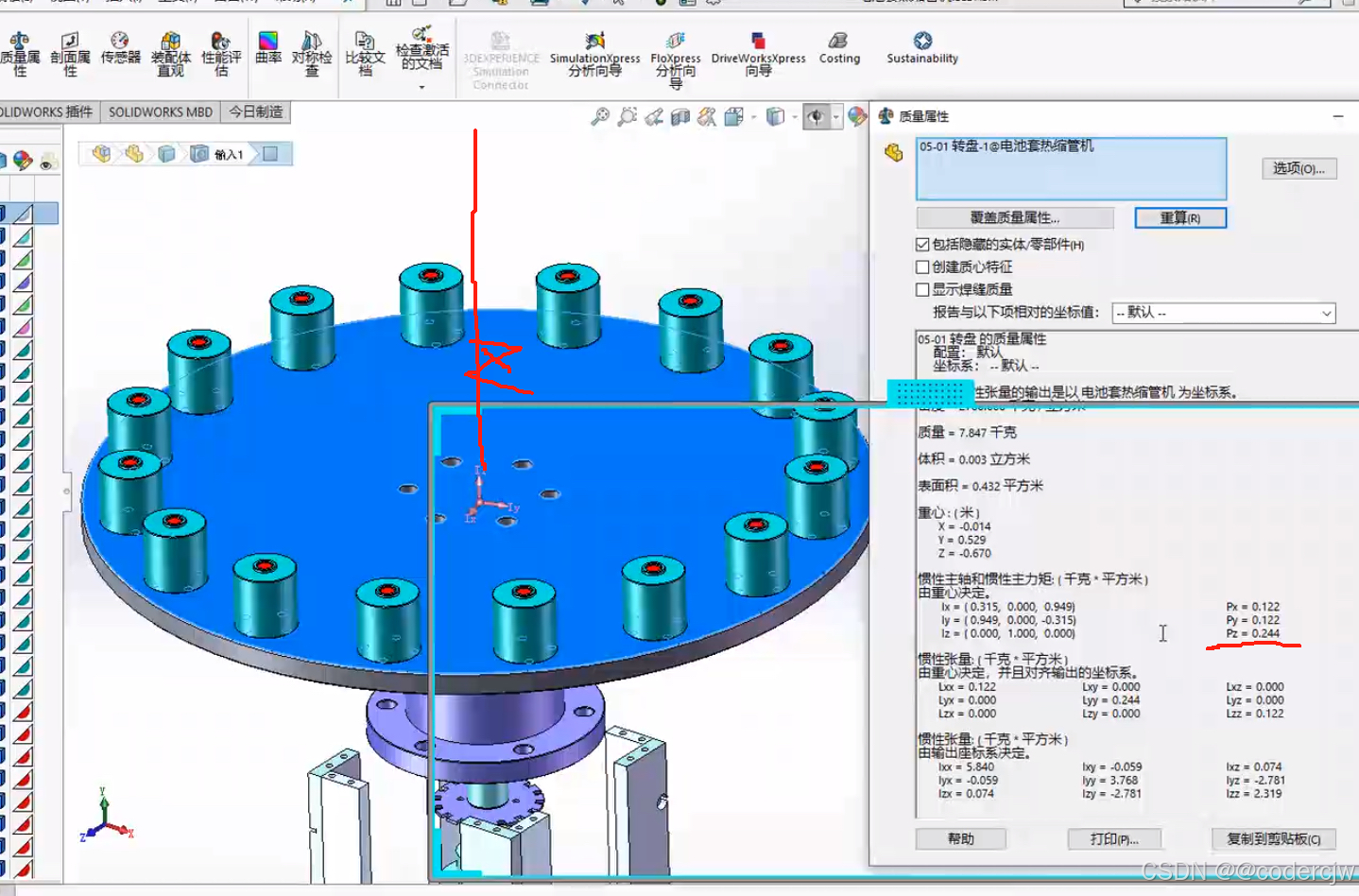
载具(6061铝合金)质量:0.134kg 0.134*16 = 2.14kg
载具(6061铝合金)惯量:mr^2=2.14*0.22 = 0.1035 kg·M^2
中间的传动轴(45号钢)惯量=0.003kg·M^2
联轴器惯量:0.00001 kg·M^2
总惯量(转动惯量):0.244 +0.1035+0.003+0.00001 = 0.35051 kg·M^2
旋转分度盘,不用计算匀速扭矩
转速计算
工位之间的角度:360/16=22.5
0.75·22.5°=16.875
(0.3s匀速的位移)
360/16.875=21.3
21.3-0.3=6.4s(6.4s 转一圈)
60s/6.4s=9.375 rpm
=0.156 rps
角加速度=2πN/t=3.14°2-0.156/0.1s=9.79 rad/s?
加速力矩T=总转动惯量·角加速度
=3505.1.104 。9.78
=3.433 N·M
电机力矩 T=T 加·K=3.5·1.5=5.25NM
惯量比:30倍
3505/30=113
行星减速机 1-100
电机力矩=5.25/100=0.0525N·M惯最比=(3500/10000)/5
=0.07
负载惯量/减速比23500 /1002

















 1999
1999

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









