







 本文介绍了一个系统封装接口层,通过该接口层,开发者可以在不同的实时操作系统中轻松移植代码,几乎无需修改。文章详细列举了CMSIS-OS在FreeRTOS中的API,并提供了配置和使用示例。
本文介绍了一个系统封装接口层,通过该接口层,开发者可以在不同的实时操作系统中轻松移植代码,几乎无需修改。文章详细列举了CMSIS-OS在FreeRTOS中的API,并提供了配置和使用示例。
在这个实时操作系统泛滥的年代,有这么一个系统封装接口层还是蛮有必要的。前些时间偶然间在STM32最新的固件库中就发现了这个系统封装接口,当时就把自己所用的系统进行封装。直到最近KEIL5.0发现其中所到的RTX系统也进行了同相的封装。对比了下感觉很有必要和大家分享一下。
采用这个接口层写程序,基本上可以说不用再去管所用的是什么操作系统。相同的代码可以轻而易举的移植到不同的实时系统中。不敢说完全没有改动,但绝对是最少的。其简洁的书写手法,也会给我的应用层带来视觉上的体验感,使用可以尽可能去关注应用。
首先这里整理下CMSISOS-FREERTOS 的API如下:
FreeRTOS 封装后的 API
| 内核控制函数 |
|
|
| osStatus osKernelStart (void); | //内核开始运行 |
|
| int32_t osKernelRunning(void); | //返回值为 1 表示正在运行 作用:系统是否正常工作 | |
| uint32_t osKernelSysTick (void); | //系统当前节拍数 | 作用:毫秒级计时 |
| osKernelSysTickMicroSec(microsec) | //微妙(宏函数) | 作用:微秒级计时 |
线程管理函数
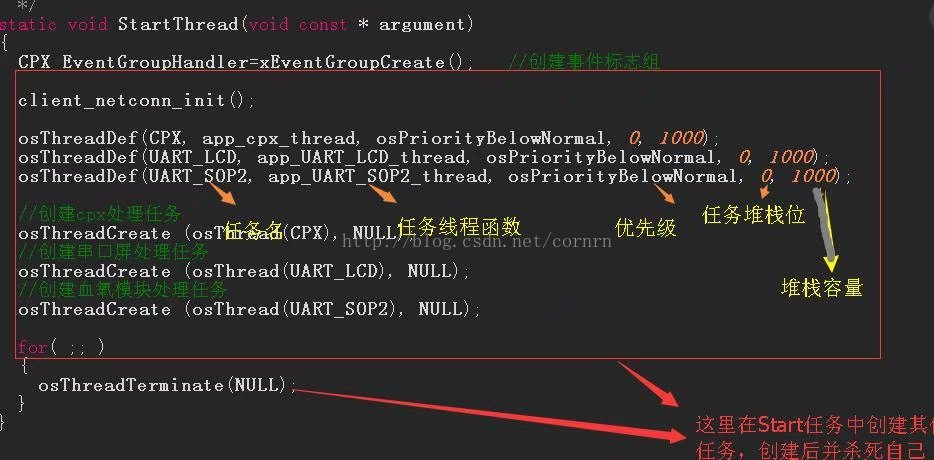
osThreadDef(name, thread, priority, instances, stacksz)//(宏函数) 作用:定义 osThreadDef_t 结构体
osThread(name)//(宏函数)作用:获取 os_thread_def_##name 结构体的指针
osThreadId osThreadCreate (const osThreadDef_t *thread_def, void *argument);//创建线程,错误返回 NULL
osThreadId osThreadGetId (void);//返回当前线程
osStatus osThreadTerminate (osThreadId thread_id); //终结线程
osStatus osThreadYield (void);//调度一次
osStatus osThreadSetPriority (osThreadId thread_id, osPriority priority); //设置线程优先级 osPriority osThreadGetPriority (osThreadId thread_id); //获取线程优先级
等待函数
osStatus osDelay (uint32_t millisec);//毫秒级延时
osEvent osWait (uint32_t millisec);//未实现
信号量管理函数
osSemaphoreDef(name)//(宏函数) 作用:定义 os_semaphore_def_##name 结构体
osSemaphore(name)//(宏函数) 作用:定义 os_semaphore_def_##name 结构体的指针
osSemaphoreId osSemaphoreCreate (const osSemaphoreDef_t *semaphore_def, int32_t count);//创建信号量
int32_t osSemaphoreWait (osSemaphoreId semaphore_id, uint32_t millisec);//信号量减一
osStatus osSemaphoreRelease (osSemaphoreId semaphore_id);//信号量加一
osStatus osSemaphoreDelete (osSemaphoreId semaphore_id);//删除信号量
| 互斥锁管理函数 |
|
|
|
| osMutexDef(name) | //(宏函数) | 作用:定义 os_mutex_def_##name 结构体 | |
| osMutex(name) | //宏函数 | 作用:定义 os_mutex_def_##name 结构体的指针 | |
| osMutexId osMutexCreate (const osMutexDef_t *mutex_def); | //创建互斥锁 | ||
| osStatus osMutexWait (osMutexId mutex_id, uint32_t millisec); //锁定互斥锁 | |||
| osStatus osMutexRelease (osMutexId mutex_id); | //解锁互斥锁 | ||
| osStatus osMutexDelete (osMutexId mutex_id); | //删除互斥锁 | ||
队列管理函数
osMessageQDef(name, queue_sz, type) //参数二:队列 size 参数三:成员 size 作用:定义
os_messageQ_def_##name 结构体
osMessageQ(name)//宏函数作用:定义 os_messageQ_def_##name 结构体的指针
osMessageQId osMessageCreate (const osMessageQDef_t *queue_def, osThreadId thread_id);//创建队列
| osStatus osMessagePut (osMessageQId queue_id, uint32_t info, uint32_t millisec); | //向队列中放入消息 | ||||
| osEvent osMessageGet (osMessageQId queue_id, uint32_t millisec); | //从队列中获取消息 | ||||
| 邮箱队列管理函数 |
|
|
|
|
|
| osMailQDef(name, queue_sz, type) //参数二:邮箱 size 参数三:消息 size | 作用:定义 os_mailQ_def_##name | ||||
| 结构体 |
|
|
|
|
|
| osMailQ(name) | //宏函数 | 作用:定义 os_mailQ_def_##name 结构体的指针 | |||
| osMailQId osMailCreate (const osMailQDef_t *queue_def, osThreadId thread_id); | //创建邮箱 | ||||
| void *osMailAlloc (osMailQId queue_id, uint32_t millisec); | //分配一个消息的空间 |
| |||
| void *osMailCAlloc (osMailQId queue_id, uint32_t millisec); | //分配一个消息的空间并且清零 | ||||
| osStatus osMailPut (osMailQId queue_id, void *mail); | //将成员丢到邮箱中 |
| |||
| osEvent osMailGet (osMailQId queue_id, uint32_t millisec); | //从邮箱中获取消息 |
| |||
| osStatus osMailFree (osMailQId queue_id, void *mail); | //释放消息空间 |
| |||
软件定时器管理函数
osTimerDef(name, function)//宏函数作用:定义 os_timer_def_##name 结构体
osTimer(name)//宏函数作用:定义 os_timer_def_##name 结构体的指针
osTimerId osTimerCreate (const osTimerDef_t *timer_def, os_timer_type type, void *argument);//参数二:是否
| 重复回调 作用:创建软件定时器 |
|
|
|
|
| osStatus osTimerStart (osTimerId timer_id, uint32_t millisec); | //开始定时 |
| ||
| osStatus osTimerStop (osTimerId timer_id); | //停止定时 |
| ||
| osStatus osTimerDelete (osTimerId timer_id); | //删除定时器 |
| ||
| 信号管理函数 |
|
|
|
|
| int32_t osSignalSet (osThreadId thread_id, int32_t signals); | //带通知值的任务通知 |
| ||
| int32_t osSignalClear (osThreadId thread_id, int32_t signals); | //未实现 |
| ||
| osEvent osSignalWait (int32_t signals, uint32_t millisec); | //参数二:取出值后位置零 作用:等待通知到来 | |||
| 内存池管理函数 |
|
|
|
|
| osPoolDef(name, no, type) | //参数二:内存池 size 参数三:成员 size | 作用:定义 | ||
| os_pool_def_##name 结构体 |
|
|
|
|
| osPool(name) | //宏函数 | 作用:定义 os_pool_def_##name 结构体的指针 | ||
| osPoolId osPoolCreate (const osPoolDef_t *pool_def); //创建内存池 |
| |||
| void *osPoolAlloc (osPoolId pool_id); |
| //分配内存 |
| |
| void *osPoolCAlloc (osPoolId pool_id); |
| //分配内存并且清零 |
| |
| osStatus osPoolFree (osPoolId pool_id, void *block); | //释放内存 |
| ||
|
|
|
|
| |
| void osSystickHandler(void); | //定时器中断处理函数 |
| ||
| osThreadState osThreadGetState(osThreadId thread_id); | //获取线程状态 | |||
| osStatus osThreadIsSuspended(osThreadId thread_id); |
| //线程是否被挂起 | ||
| osStatus osThreadSuspend (osThreadId thread_id); |
| //挂起线程 | ||
| osStatus osThreadResume (osThreadId thread_id); |
| //恢复调度 | ||
| osStatus osThreadSuspendAll (void); |
|
| //挂起所有线程 |
|
| osStatus osThreadResumeAll (void); |
| //恢复调度所有线程 | ||
| osStatus osDelayUntil (uint32_t *PreviousWakeTime, uint32_t millisec); | //绝对延时 | |||
| osStatus osThreadList (uint8_t *buffer); |
|
| //获取任务信息 任务名、优先级 | |
| osEvent osMessagePeek (osMessageQId queue_id, uint32_t millisec); | //瞥一眼队列中有没有消息 | |||
| osMutexId osRecursiveMutexCreate (const osMutexDef_t *mutex_def); | //创建递归互斥锁 | |||
| osStatus osRecursiveMutexRelease (osMutexId mutex_id); | //释放递归互斥锁 | |||
| osStatus osRecursiveMutexWait (osMutexId mutex_id, uint32_t millisec); | //锁定递归互斥锁 | |||
下面先用FreeRTOS系统接口为例进行简单概述:


这里是主要的配置区,你所用到哪些功能用0或1来选择和取消。由于有些和系统中宏配置有相同意思的宏配置,所以我这里直接用了系统配置中的宏。

这是所用不同系统时的主要不同处。其他地方就很少会改动了。
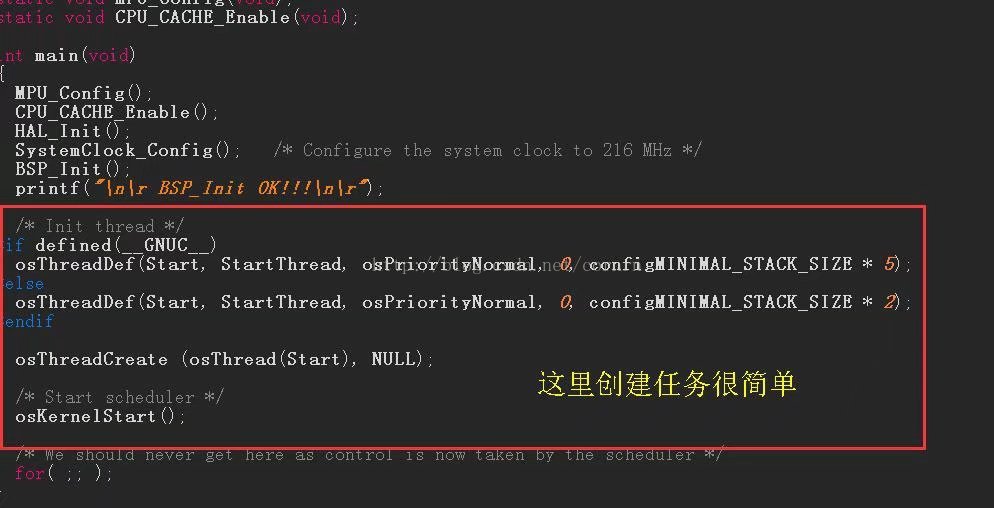
下面来举例来说明如何简单的使用这个接口。
首先进入main函数:
更多接受可以如下方法进去官网查看CMSIS-OS API使用



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









