







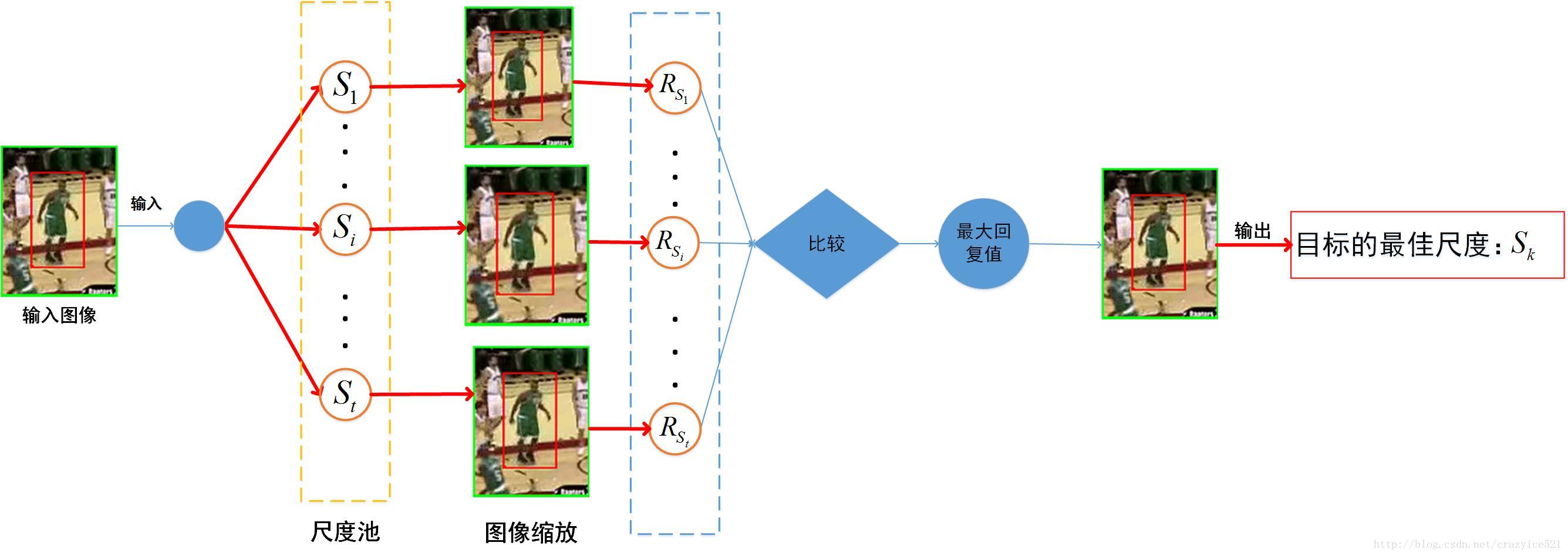
(1)有问题就要解决,对于存在的这两个大的问题有什么解决方法呢,首先对于尺度的解决,近些年来解决比较好的就先看
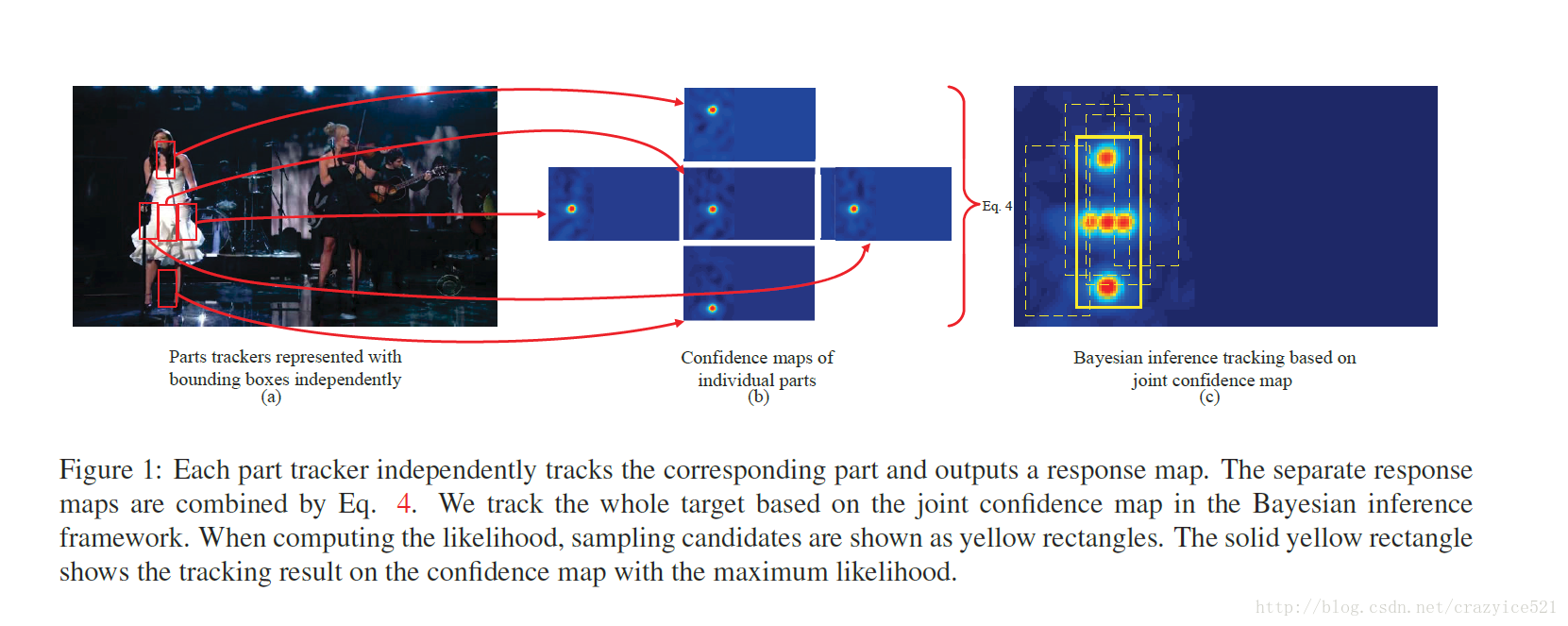
(2)对于遮挡问题的解决就相对来说比较困难了,这个问题算是Long-term tracking 的问题。因为对于目标跟踪过程当中,跟踪器是没有办法知道目标是否被遮挡,是不是完全被遮挡还是被遮挡一部分的,对于我们人来说,这个我们很容易就能判断出来,但是对于计算机来说这个是很困难的,近些年来也提出一些方法,















 984
984
08-24
05-18

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









