







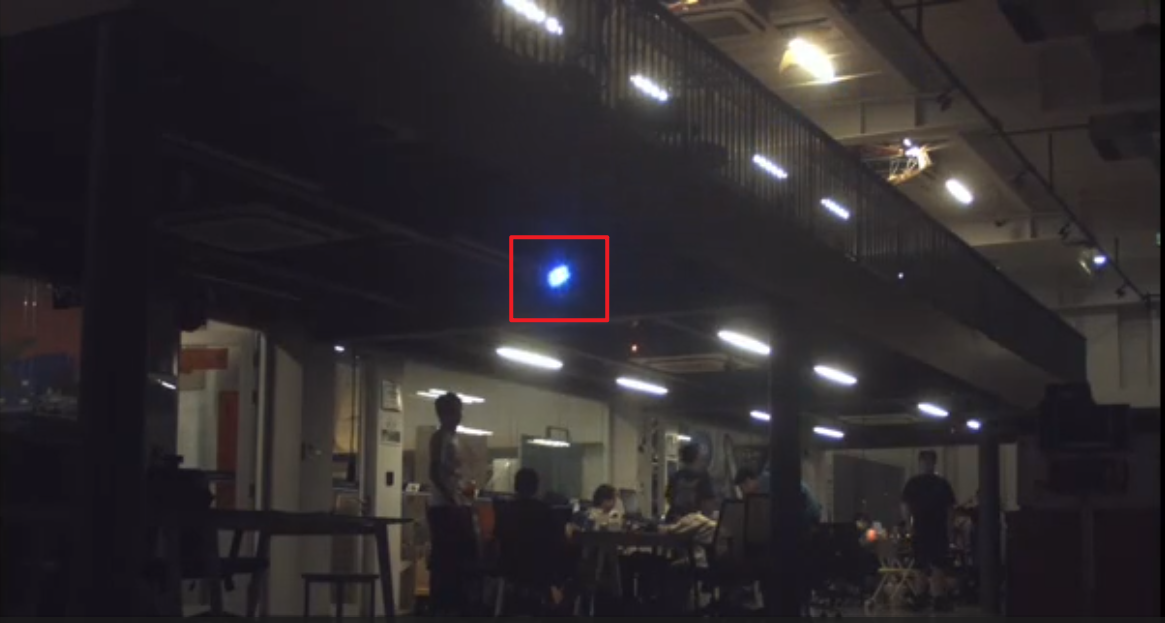
遇到一个需求,背景变换不大,捕捉一个发光羽毛球的运动轨迹,涉及的核心方法就是 帧间差分
看一下原始视频和最终效果
如有问题,需要帮助,欢迎留言、私信或加群 交流【群号:392784757】
这个发光的就是发光羽毛球,视频的背景变化不大,还算可控
感谢 https://uutool.cn/gif-edit/ https://www.freeconvert.com/zh/gif-compressor 提供的降帧 压缩 服务
帧间差分
frame_gray = cv.cvtColor(frame,cv.COLOR_BGR2GRAY)
frame_gauss = cv.GaussianBlur(frame_gray,(5,5),0)
if background is None:
background = frame_gauss
continue
# diff = cv.absdiff(background,frame_gauss)
diff = cv.subtract(frame_gauss,background)
ret,thresh = cv.threshold(diff,120,255,cv.THRESH_BINARY)
# dilated = cv.dilate(thresh,es,iterations=3)
background = frame_gauss
打开视频流
对得到到的帧进行 灰度化、gauss 模糊,一定程度上降低 可能存在的轻微抖动,减少噪声
如果背景是绝对静止不对,background 直接使用第一帧就行,
也就不需要更新了
进行差分
# diff = cv.absdiff(background,frame_gauss)
diff = cv.subtract(frame_gauss,background)
ret,thresh = cv.threshold(diff,120,255,cv.THRESH_BINARY)
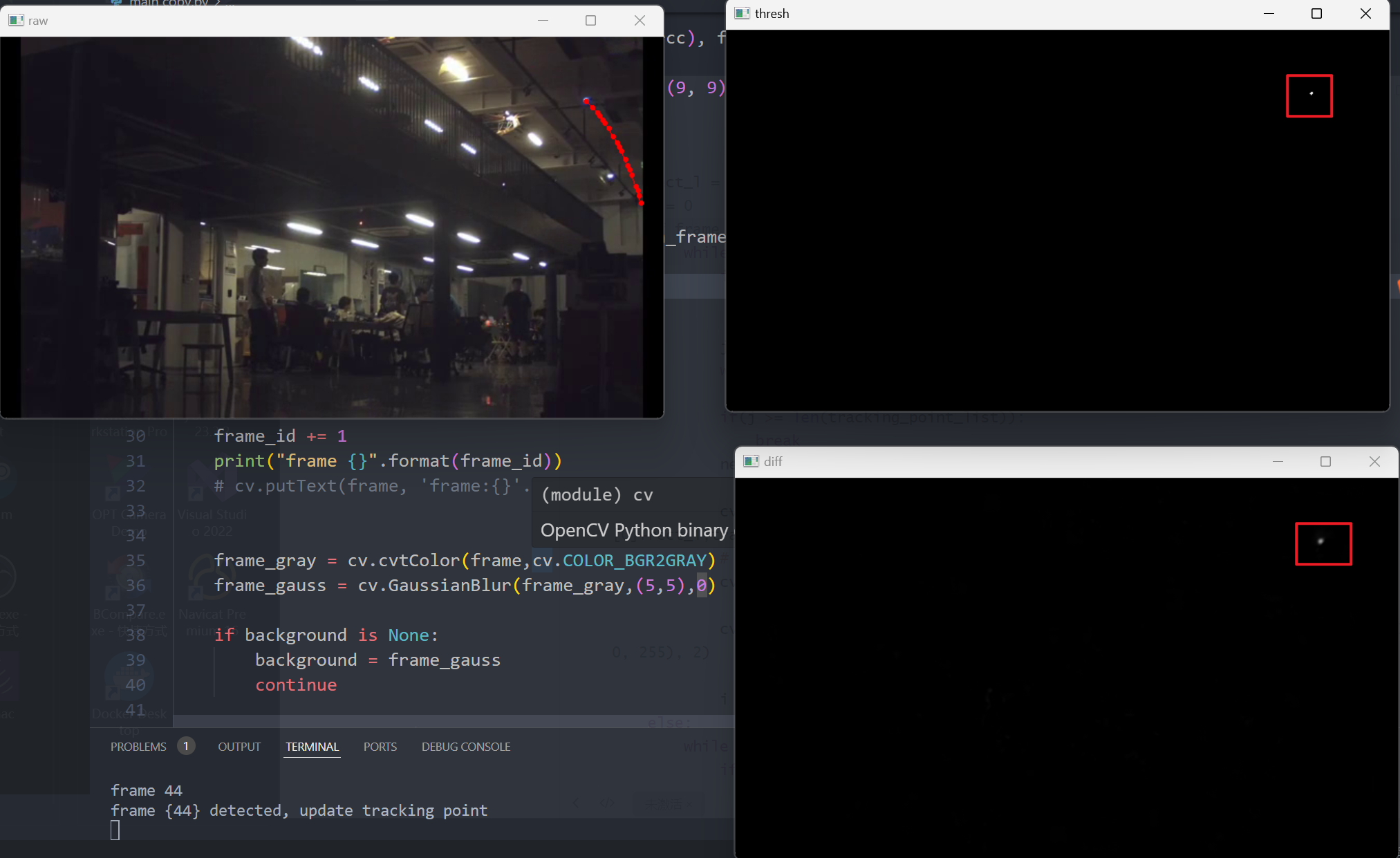
这里测试 如果使用 absdiff() 接口 会出现 两个 目标的情况,使用 subtract() 不会出现,效果如下 右下
然后应用阈值得到二值图像,右上
然后找 边界,根据面积范围筛选到唯一的运动目标
contours, hierarchy = cv.findContours(thresh.copy(), cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for c in contours:
if cv.contourArea(c) > 250: # for ball
continue
print("frame {} detected, update tracking point".format({frame_id}))
(x, y, w, h) = cv.boundingRect(c)
tracking_point_list[frame_id] = (x+w//2, y+h//2)
将边界用 矩形框保住,中心作为跟踪的目标点
绘制、写出
后续就是进行绘制,写出
绘制
使用 line() circle() rectangle() 基于保存的tracking_point_list 绘制即可。
略
写出
out = cv.VideoWriter('task1_result.avi',int(fourcc), fps, (int(w),int(h)),True)
# ... 省去 frame 绘制
out.write(frame)
VideoWriter(filename, fourcc, fps, frameSize, isColor)
- filename 文件路径
- fourcc 编码器
- fps 码率
- frameSize 帧的宽高,int 类型
- isColor 是否为彩色
报错: Failed to load OpenH264 library: openh264-1.8.0-win64.dll
在这里 https://github.com/cisco/openh264/releases 下载后解压 放到 python.exe 同级目录下 即可
完整代码
import cv2 as cv
import numpy as np
import time
video = cv.VideoCapture('task1.avi')
if(video.isOpened()):
n_frame = video.get(cv.CAP_PROP_FRAME_COUNT)
w = video.get(cv.CAP_PROP_FRAME_WIDTH)
h = video.get(cv.CAP_PROP_FRAME_HEIGHT)
fps = video.get(cv.CAP_PROP_FPS)
fourcc = video.get(cv.CAP_PROP_FOURCC)
print("frams:{} w:{} h:{}".format(n_frame,w,h))
out = cv.VideoWriter('task1_result.avi',int(fourcc), fps, (int(w),int(h)),True)
es = cv.getStructuringElement(cv.MORPH_ELLIPSE, (9, 9))
frames = []
background = None
circle_r = 1
line_thick = 1
tracking_point = None
tracking_point_list = [None for i in range(int(n_frame))]
frame_id = 0
while video.isOpened():
ret, frame = video.read()
if frame is None:
break
frame_id += 1
print("frame {}".format(frame_id))
# cv.putText(frame, 'frame:{}'.format(frame_id), (50, 50), cv.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
frame_gray = cv.cvtColor(frame,cv.COLOR_BGR2GRAY)
frame_gauss = cv.GaussianBlur(frame_gray,(5,5),0)
if background is None:
background = frame_gauss
continue
# diff = cv.absdiff(background,frame_gauss)
diff = cv.subtract(frame_gauss,background)
ret,thresh = cv.threshold(diff,120,255,cv.THRESH_BINARY)
# dilated = cv.dilate(thresh,es,iterations=3)
background = frame_gauss
# contours, hierarchy = cv.findContours(diff.copy(), cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
contours, hierarchy = cv.findContours(thresh.copy(), cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for c in contours:
if cv.contourArea(c) > 250: # for ball
continue
print("frame {} detected, update tracking point".format({frame_id}))
(x, y, w, h) = cv.boundingRect(c)
tracking_point_list[frame_id] = (x+w//2, y+h//2)
rect_l = 2
i = 0
while i < len(tracking_point_list):
if i == 0 or tracking_point_list[i] is None:
i += 1
continue
j = i + 1
while((j < len(tracking_point_list)) and tracking_point_list[j] is None):
j = j + 1
if(j >= len(tracking_point_list)):
break
nextPoint = tracking_point_list[j]
cv.rectangle(frame, tracking_point_list[i], (tracking_point_list[i][0]+rect_l,tracking_point_list[i][1]+rect_l), (0, 0, 255), 2)
# cv.circle(frame, tracking_point_list[i], 2, (0, 0, 255), 1)
cv.line(frame, tracking_point_list[i], nextPoint, (0, 0, 255), line_thick)
cv.rectangle(frame, nextPoint, (nextPoint[0]+rect_l,nextPoint[1]+rect_l), (0, 0, 255), 2)
i += 1
out.write(frame)
cv.imshow('raw',frame)
# cv.imshow('contours', frame_gauss)
cv.imshow('diff', diff)
cv.imshow('thresh',thresh)
if cv.waitKey(10) & 0xFF == 27 :
break
time.sleep(0.2)
video.release()
cv.destroyAllWindows()
如有问题,需要帮助,欢迎留言、私信或加群 交流【群号:392784757】















 200
200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









