






以九自由度机械臂为例,演示
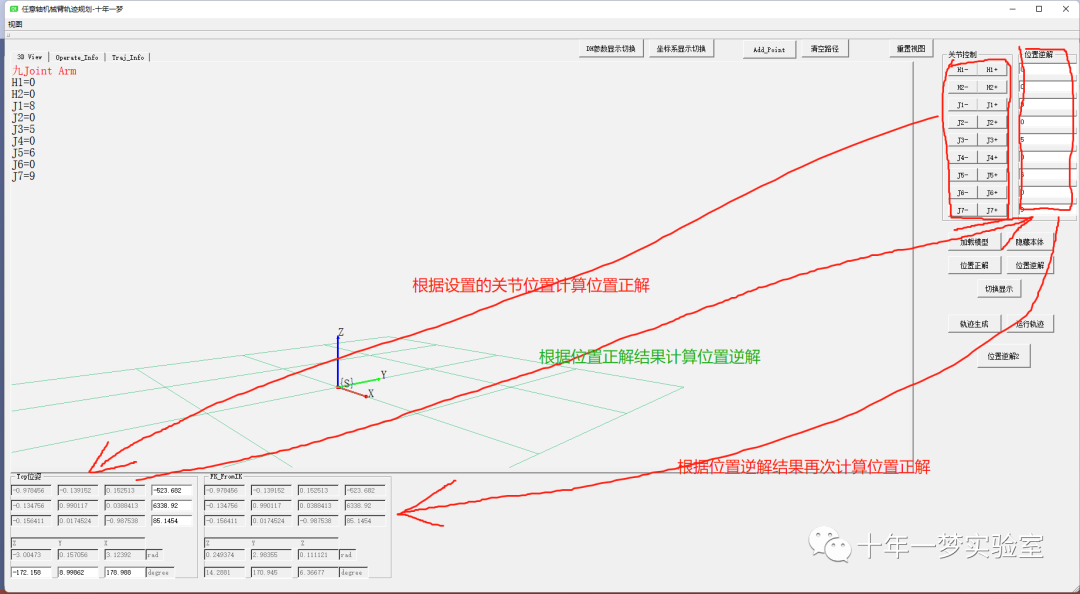
学习orocos kdl开发的demo
一、 打开VS2019 ,安装Qt Visual Studio 2019 Tools。
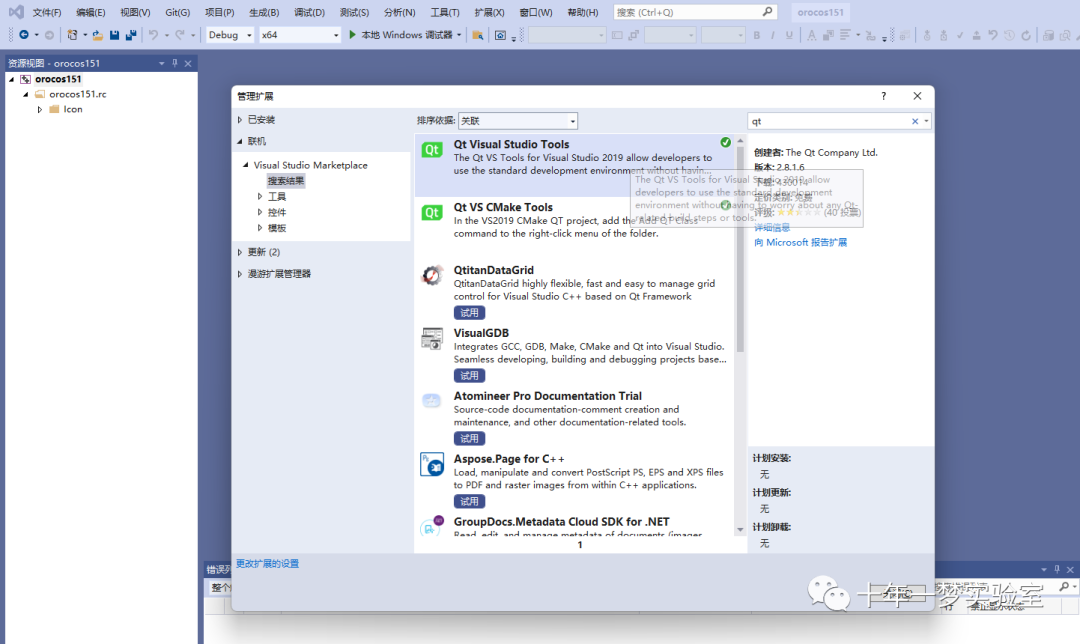
扩展-管理扩展-搜索QT
二、创建Qt Widgets 应用,设置好后运行OK,进入下一步

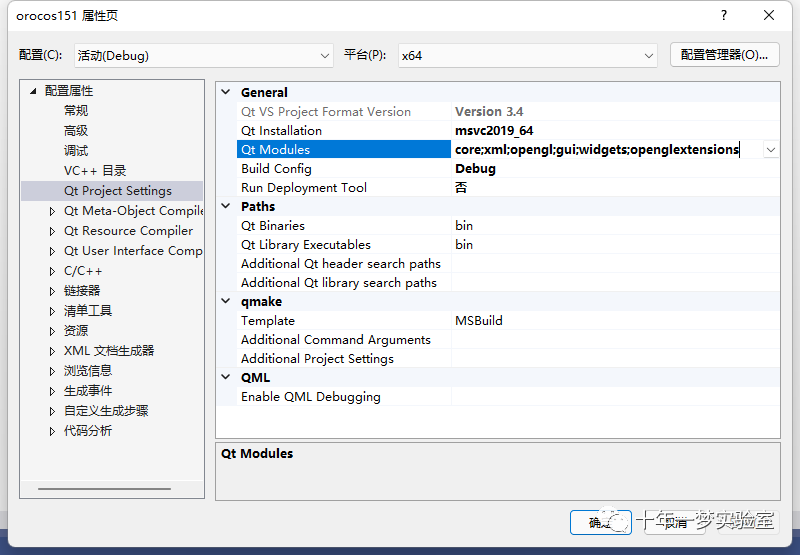
三、设置Qt

扩展-Qt VS Tools-Options
四、将源码拷贝到新的工程目录下,在VS中右键解决方案-添加-现有项
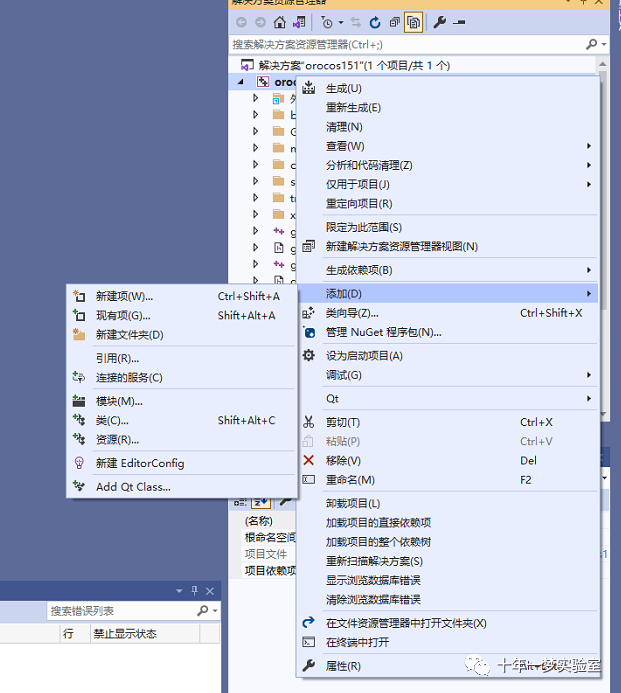
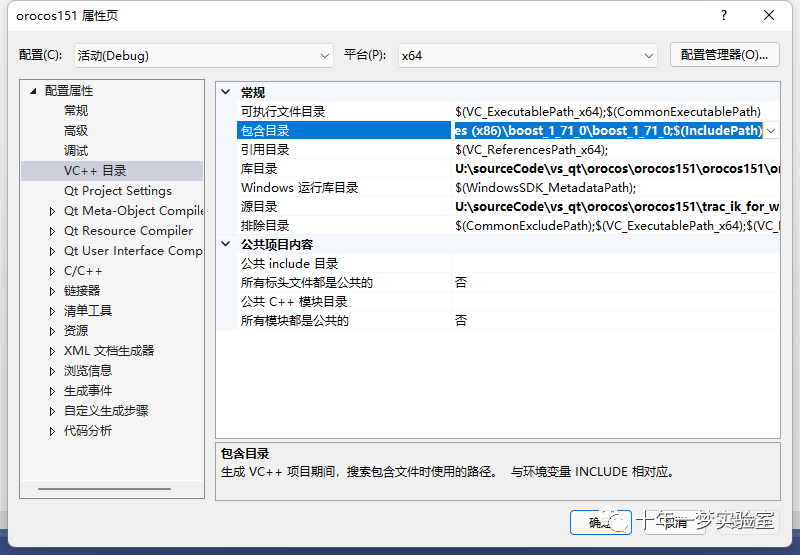
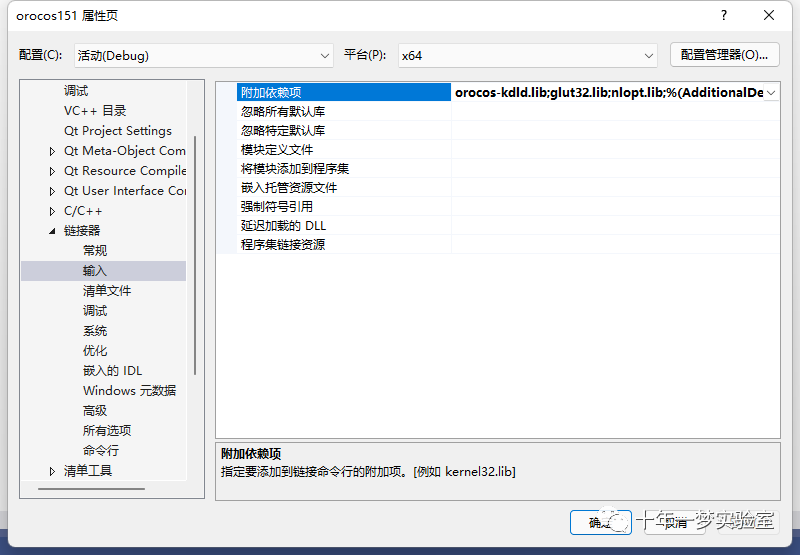
将需要的头文件和cpp文件添加进来 ,添加第三方库。
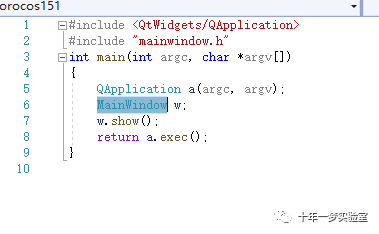
更换main函数的UI窗口
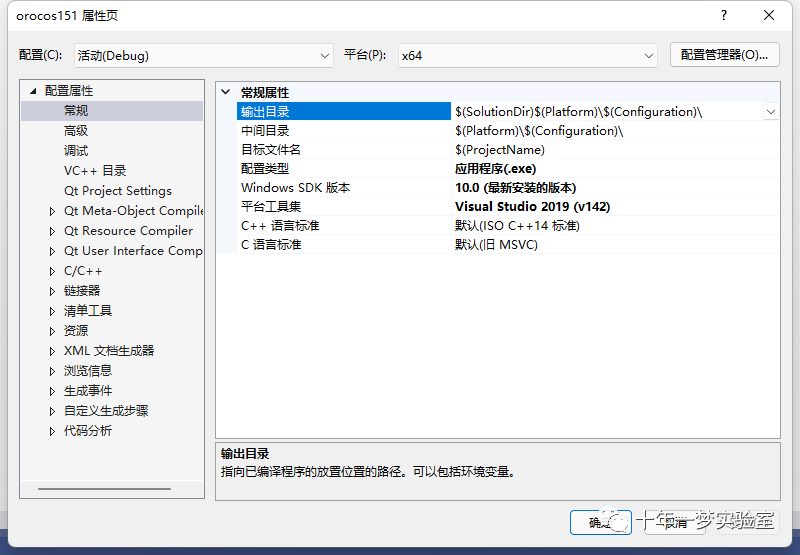
设置项目属性
最后运行调试……
其他问题补充:
1. #define M_PI_2 3.14159265358979323846/2 ,忘了除以2,导致最初调试结果异常。
2.ui->textEdit_info->append(QString::fromLocal8Bit("模型加载完毕!"));对于中文字符显示异常,需要将"tr()" -> "QString::fromLocal8Bit()"。有时还需要将字符串的最后一位标点符号改为“英文半角”。
3.操作说明
操作说明:
ctrl+F1 控制H1轴负向移动
shift+F1控制H1轴正向移动
F2~F9分别对应H2 J1 J2 J3 J4 J5 J6 J7。
鼠标右键+水平移动/垂直移动 可以旋转模型
鼠标左键+水平移动/垂直移动 可以平移模型
鼠标滚轮可以调整与模型的距离远近。
键盘操作:3D环境获得焦点
A-左转模型;
D-右转模型;
W-上翻模型;
S-下翻模型。
键盘操作:主窗体空白处获得焦点(鼠标左键单击一下)
F1_F3:控制欧拉角Z-Y-Z正向变化。幅度±1度
F4-F6:控制Tcp的位置正向变化。dx/dy/dz=±5mm
F1下面的数字:1-3控制欧拉角负向变化。
4-6控制Tcp位置x/y/z 负向变化
4. 解决方案配置(Debug X64)应该与Orocos kdl的编译配置一致。
The End















 4849
4849











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









