






多体动力学中的螺旋与李群理论:树形拓扑系统的递归算法与运动方程
作者:Andreas Müller
摘要:螺旋和李群理论有助于实现用户友好的多体系统(MBS)建模,同时能生成计算效率高的递归算法。这种公式化表述固有的框架不变性,使得在运动学建模中可以使用任意参考系(而无需遵循像Denavit - Hartenberg约定这样的建模惯例),并且避免引入关节框架。计算效率得益于对旋量、加速度和力螺旋的一种表示方法,它将计算量降至最低。这一优势可直接应用于动力学公式。在本文中,针对四种最常用的旋量表示形式,推导了递归的O(n)牛顿 - 欧拉算法,并讨论了它们的具体特点。同时,将这些公式与文献中提出的相应算法进行了关联。利用李群公式,以封闭形式推导了两种多体系统运动方程:即所谓的欧拉 - 若尔当或 “投影” 方程(凯恩方程是其特殊情况),以及拉格朗日方程。递归运动学公式很容易扩展到更高阶,以计算运动方程的导数。为此,推导了加速度和加加速度的递归公式。本文还简要讨论了如何利用这些公式推导线性化运动方程及其时间导数。几何建模便于直接应用李群积分方法,文中对此也进行了简要探讨。
关键词:多体系统动力学;相对坐标;递归算法;O(n)螺旋;李群;牛顿 - 欧拉方程;拉格朗日方程;凯恩方程;欧拉 - 若尔当方程;投影方程;李群积分;线性化
1 引言
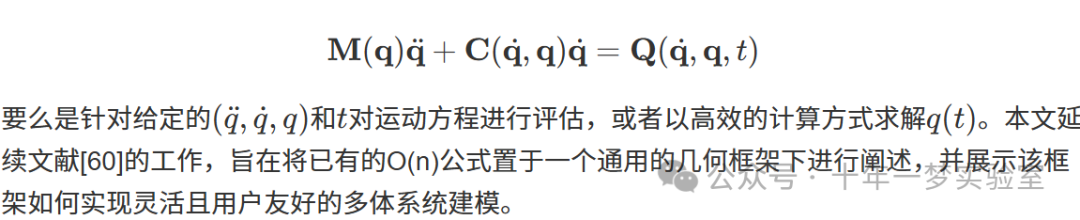
计算多体系统(MBS)动力学的核心任务,要么是以易于处理的方式,显式构建无约束树形拓扑多体系统的运动方程(EOM),其形式为:
本文的结构如下:第2节首先推导加速度、加加速度以及雅可比矩阵偏导数的递归关系;第3节回顾文献[60]中引入的四种不同旋量表示形式的牛顿 - 欧拉方程;第4节介绍相应的用于评估运动方程的递归O(n)逆动力学算法;其中,体固定算法与文献[2, 7, 30, 34, 35, 44, 45, 67, 68, 70, 71, 76]中的类似,混合公式与文献[1, 6, 37, 38, 73, 74]中的类似,空间公式与文献[29]中的类似;第5节给出两种封闭形式的运动方程;在5.1节中,介绍欧拉 - 若尔当或 “投影” 方程[14, 84],结合多体系统运动学的螺旋公式,该方程能根据易于获取的几何数据实现高效的多体系统建模;在5.2节中,利用李群方法给出拉格朗日运动方程的封闭形式;需要注意的是,本文所提出的公式在应用递归运动学和动力学算法时,无需引入关节框架,可选择最适合的算法进行多体系统建模。
第6节讨论李群公式对运动方程线性化的意义,以及运动方程对几何设计参数和时间导数的导数计算;最后,第7节简要探讨李群积分方法的应用。文献[60]中的运动学关系总结在附录A中,基本的李群背景知识可参考文献[47, 63, 75]。
2 加速度、加加速度和雅可比矩阵的偏导数
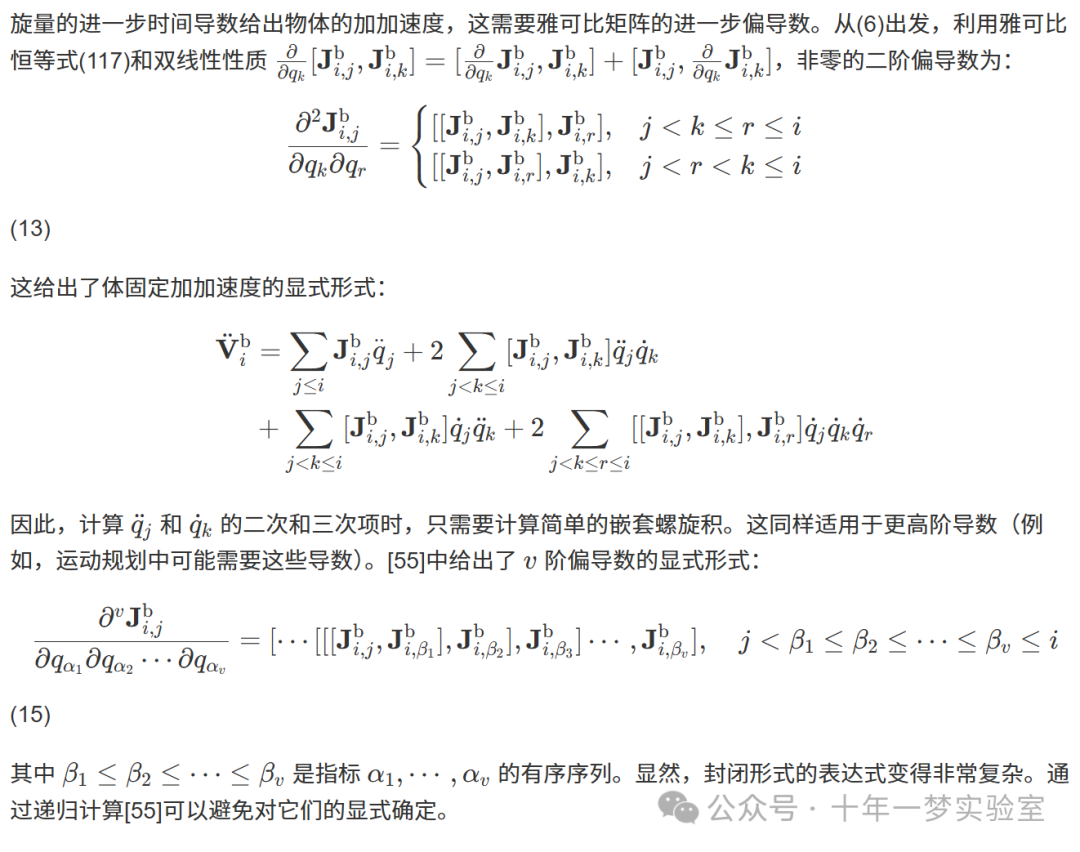
螺旋理论方法除了能够紧凑地描述多关节物体系统的有限运动和瞬时运动外,一个显著特点是它可以用几何对象明确表示偏导数。此外,使用指数积公式(POE)的运动学解析公式,能够为瞬时关节螺旋(即雅可比矩阵)的高阶导数提供紧凑的表达式,这对于运动方程的灵敏度分析和线性化可能是相关的。在本节中,将给出体固定、空间和混合表示下运动链的加速度和加加速度的结果。混合表示的相应关系可利用文献[60]表3中的关系,从上述任何一种表示中轻松推导得出。
2.1 体固定表示 Body fixed representation


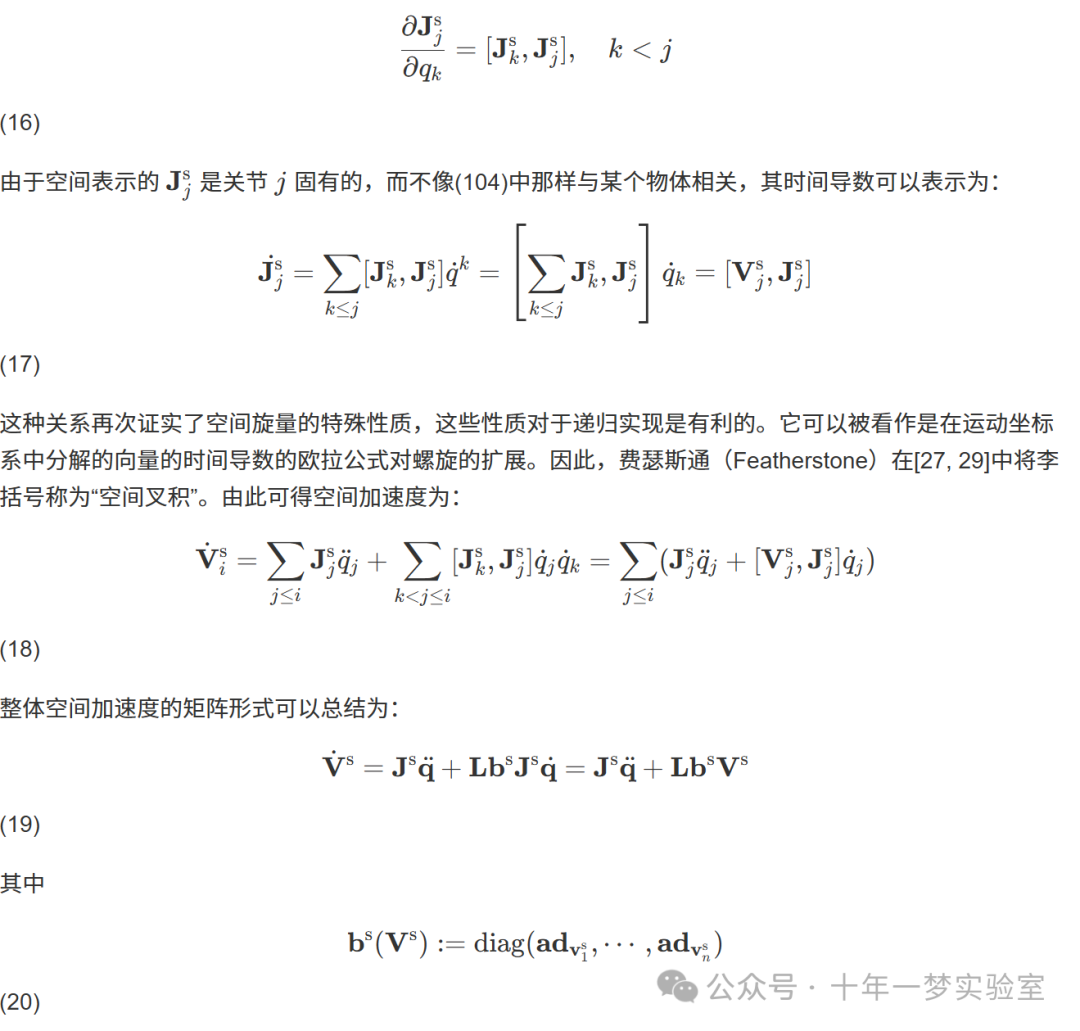
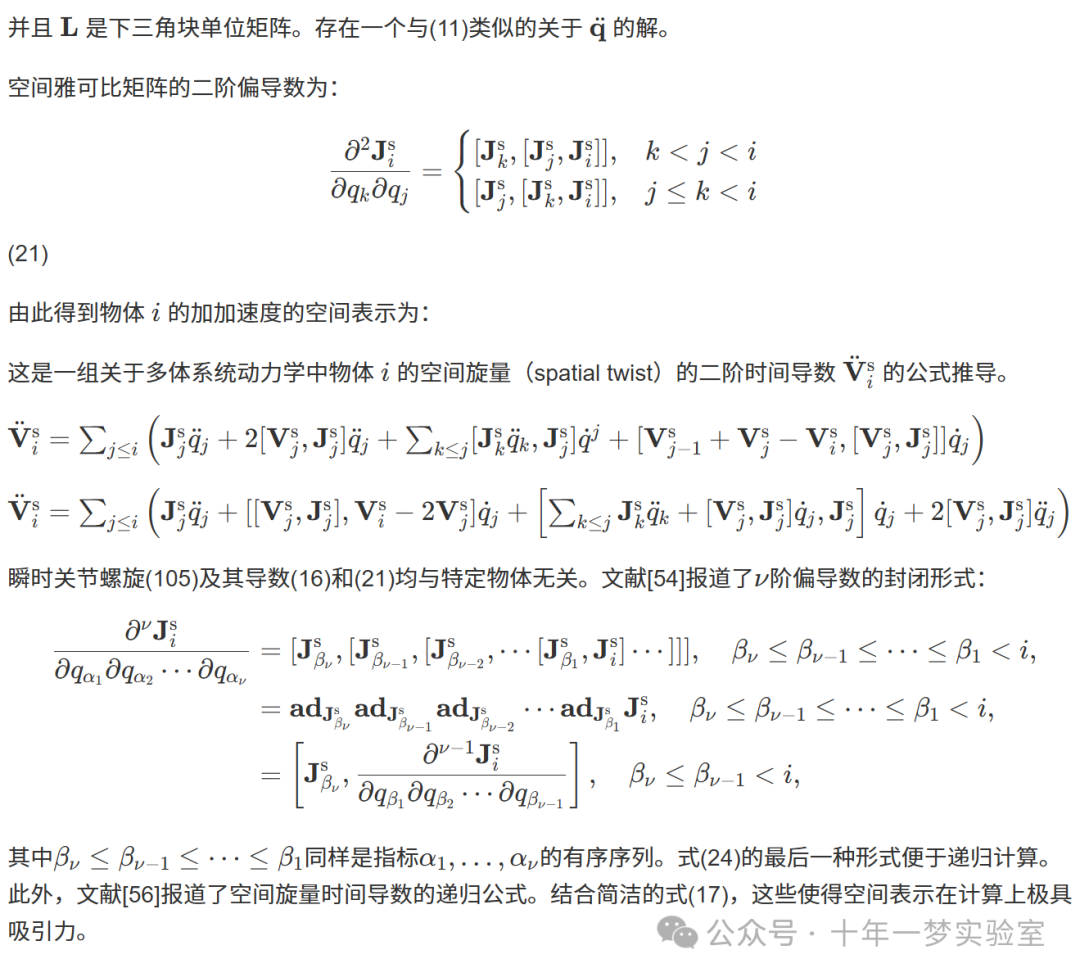
2.2 空间表示 Spatial representation
按照与推导(3)相同的方法,得到空间雅可比矩阵的偏导数为:
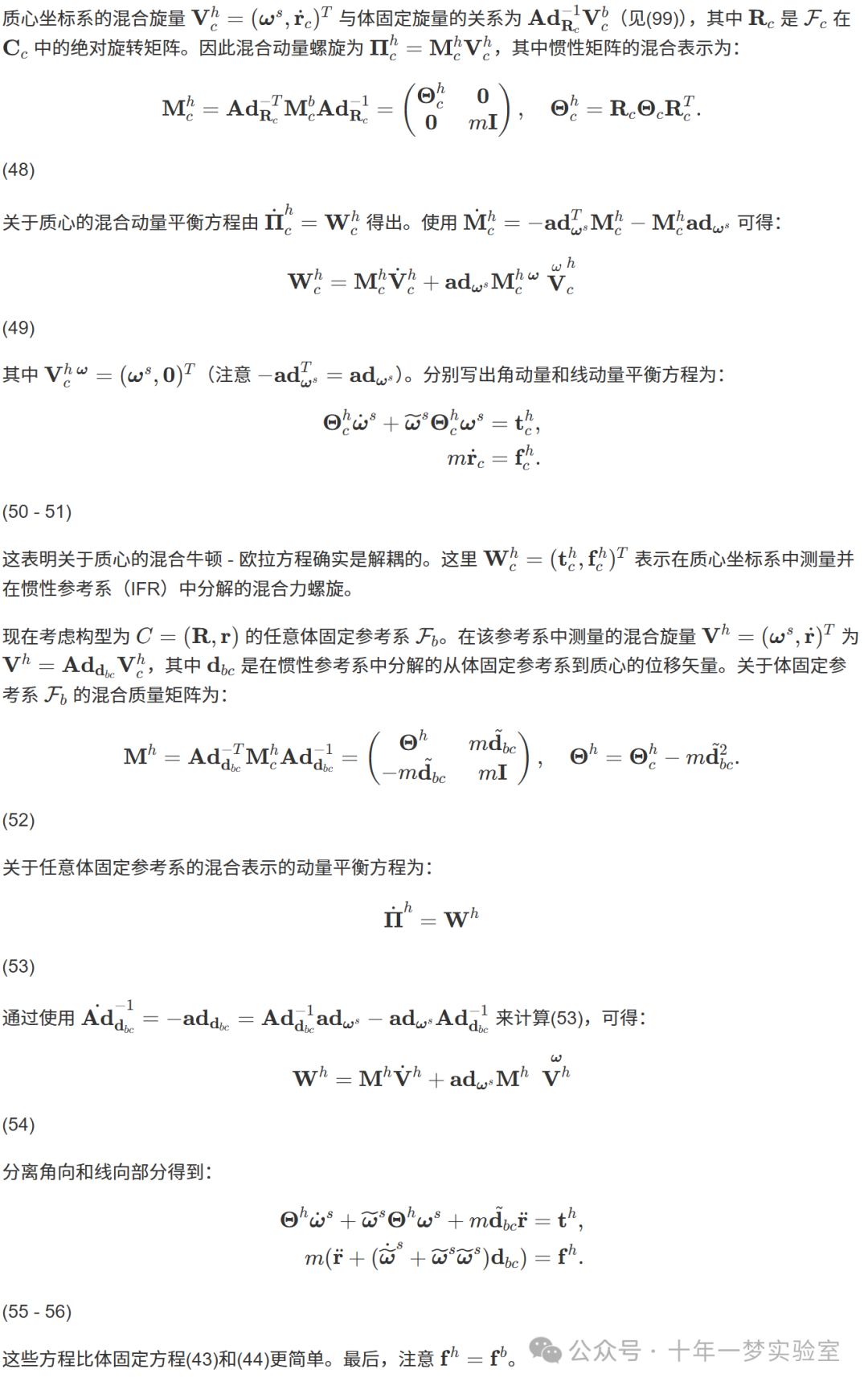
2.3 混合形式 Hybrid form

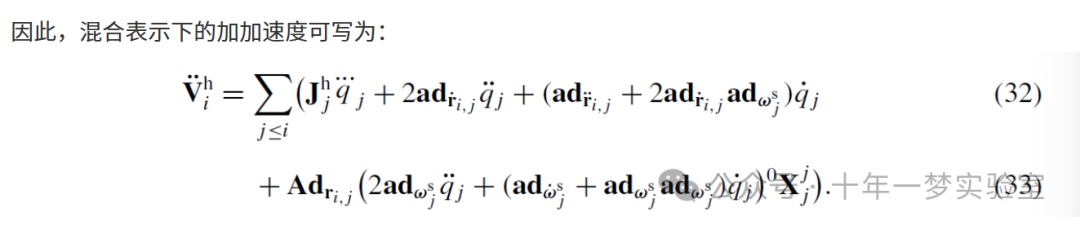
这些是所谓 “空间向量” 公式(即使用旋量的混合表示)[30, 37, 38, 44, 72, 74]中的核心关系。在这种情况下,李括号或螺旋积(115)被称为 “空间叉积” [27, 29]。
2.4 混合表示
利用式(101),结合混合表示的结果可得:

3 不同表示形式下的牛顿 - 欧拉方程
3.1 空间表示
3.2 体固定表示
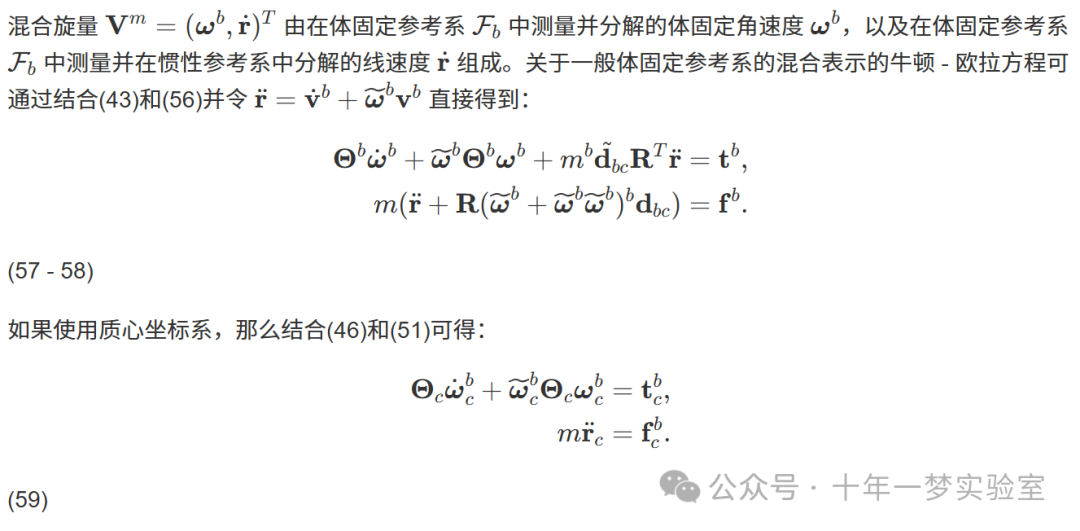
3.3 混合形式
3.4 混合形式
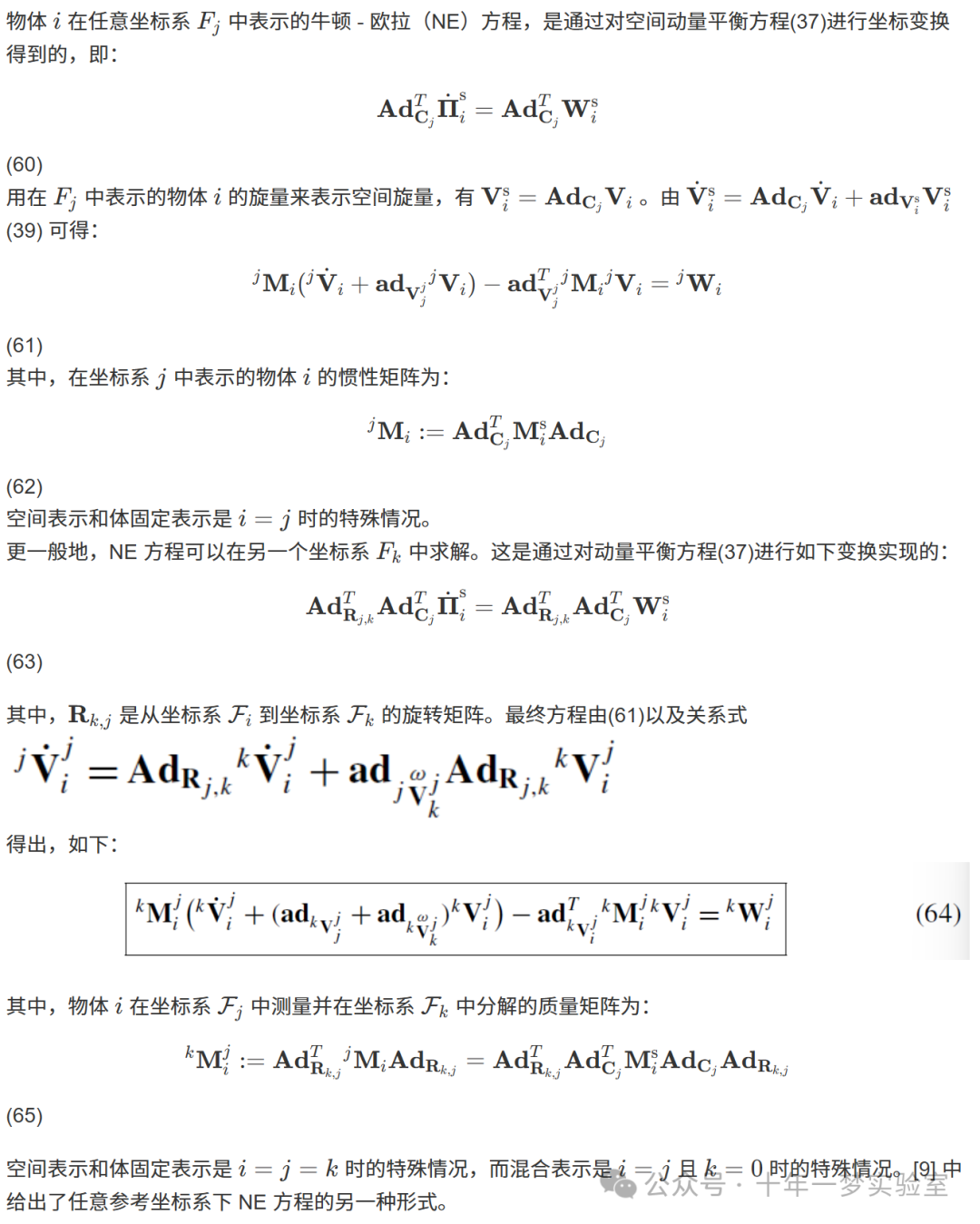
3.5 任意表示
4 运动链运动方程的递归求值
复杂多体系统(MBS)的基于模型的控制以及计算多体系统动力学依赖于高效的递归逆动力学和正向动力学算法。[46] 中以一种抽象的、即无坐标的方法给出了树形拓扑多体系统的递归牛顿 - 欧拉方法。然而,使用不同表示的各种递归方法会导致计算成本不同。接下来,将介绍各种逆动力学算法,并估计它们的计算工作量。详细的分析和正向动力学算法超出了本文的范围。不过,所呈现的讨论对于相应的正向动力学算法也具有一定的指示作用。一些结果可以在 [65, 79, 85] 中找到。然而,这取决于实际的实现情况。仍需进行比较研究,并将其作为进一步研究的一部分。
4.1 体固定表示

4.2 空间表示

4.3 混合形式

4.4 体固定参考系的选择
李群公式涉及易于获取的几何和惯性属性,例如可从CAD数据中得到。
在文献[60]以及前面的章节中,介绍了两种描述多体系统几何的方法(使用和不使用体固定关节框架),以及三种表示速度和加速度的形式(体固定、空间、混合),每种方法和形式都有其优点。几何描述与旋量表示相互独立。例如,几何可以用在惯性参考系中表示的关节螺旋来描述,而运动学和动力学则使用体固定旋量进行建模。这使我们能够利用低复杂度的混合或空间递归牛顿 - 欧拉方程,同时仍可自由选择是否使用体固定关节框架。
5 封闭形式的运动方程
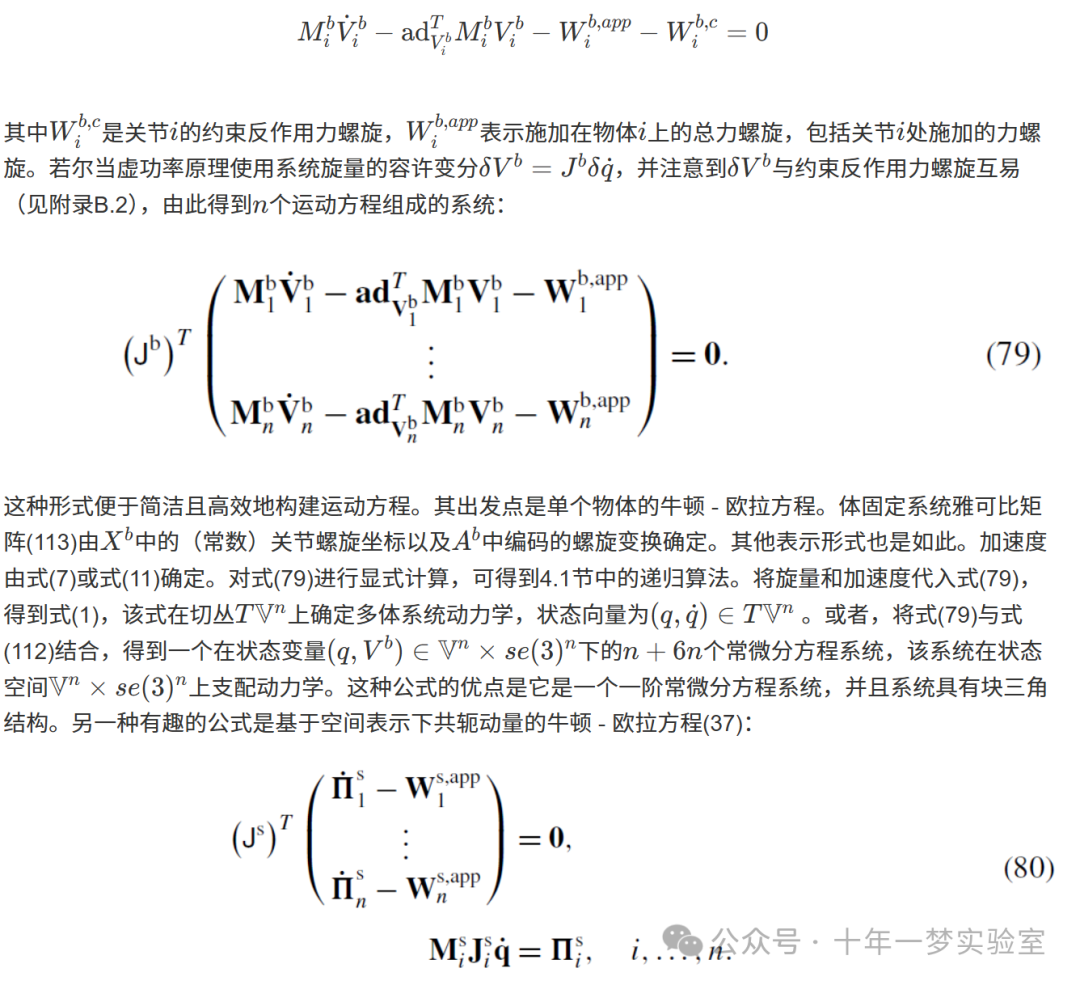
5.1 欧拉 - 若尔当方程
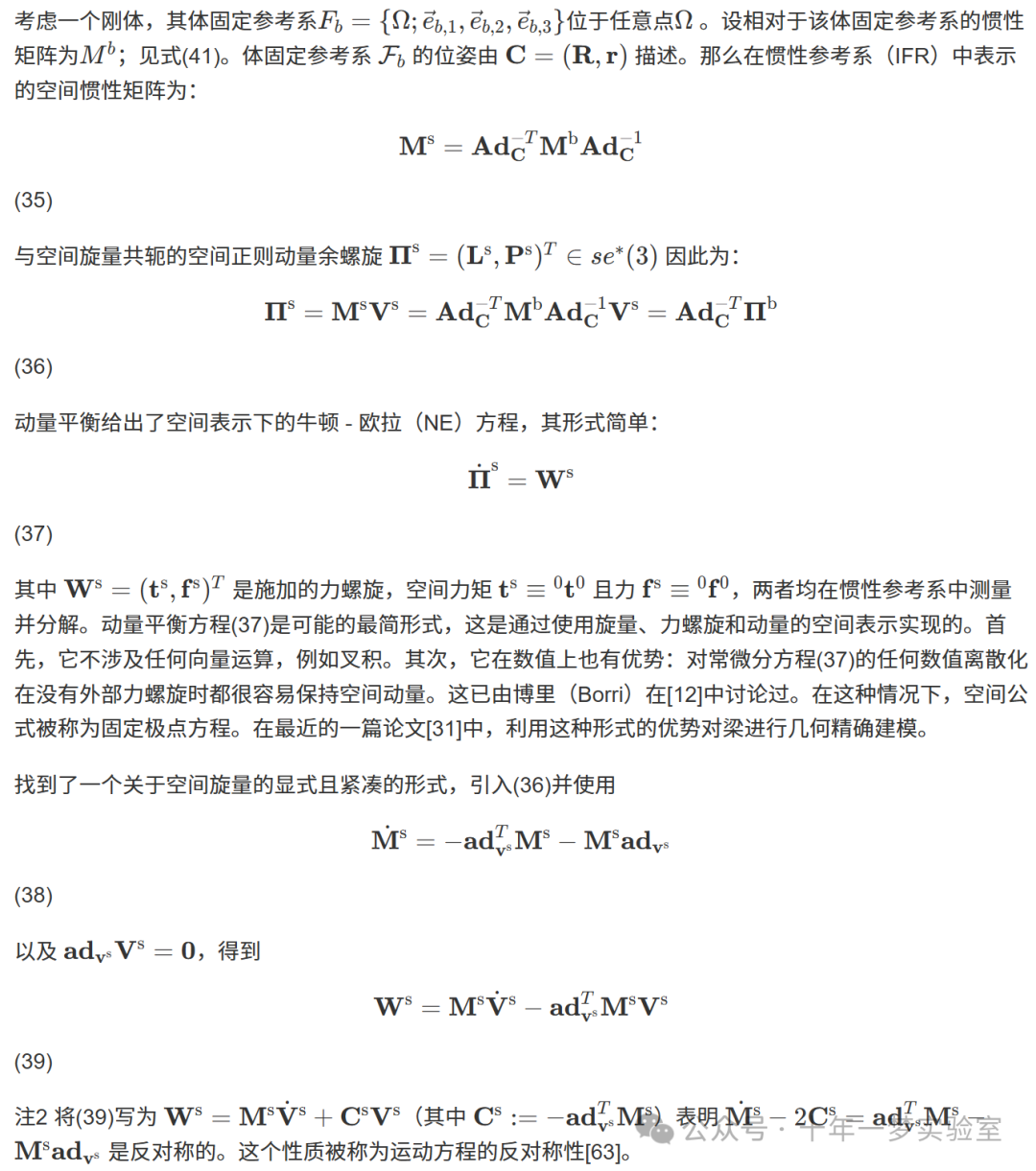
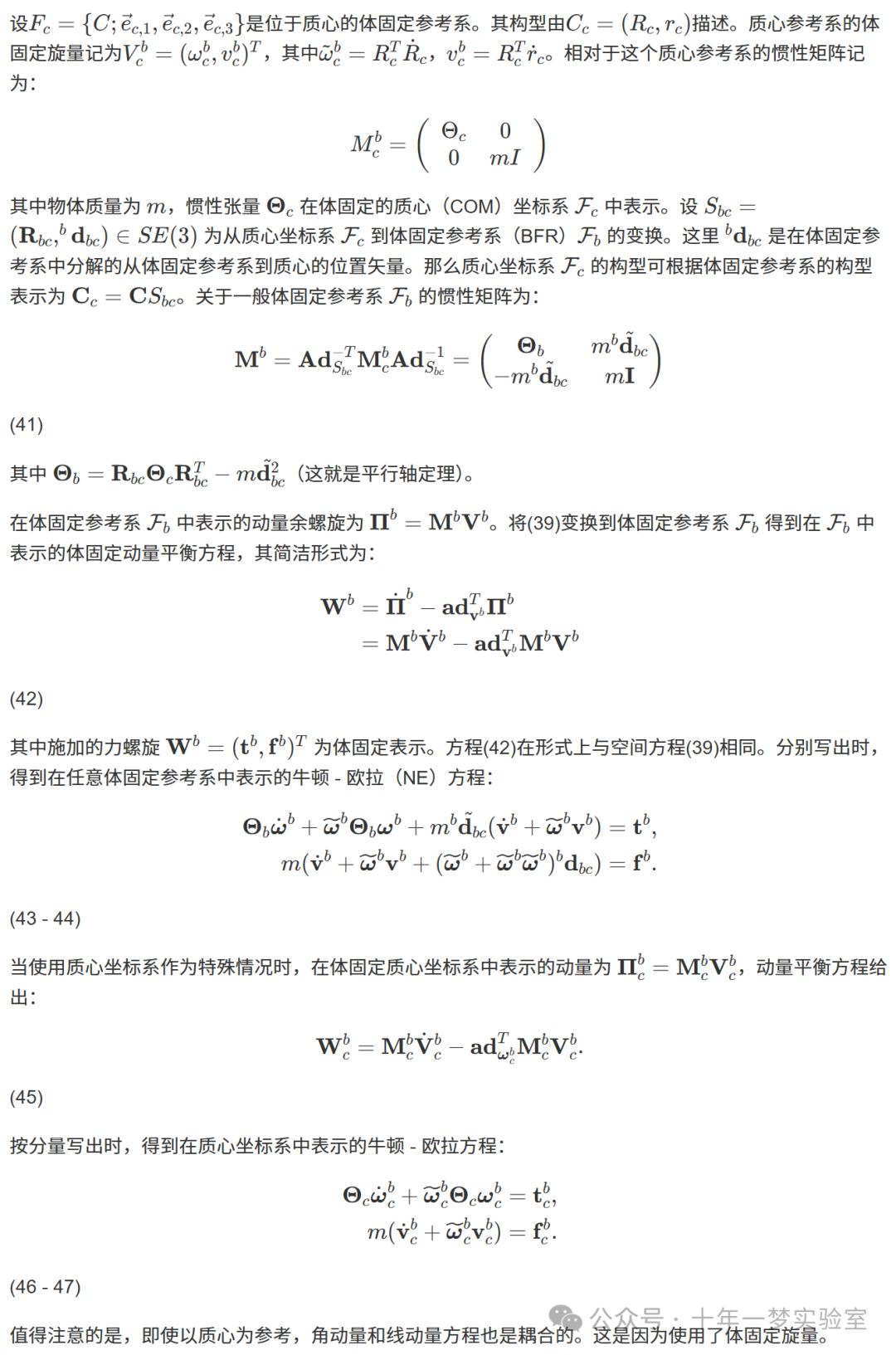
多体系统中单个物体的体固定牛顿 - 欧拉方程为:
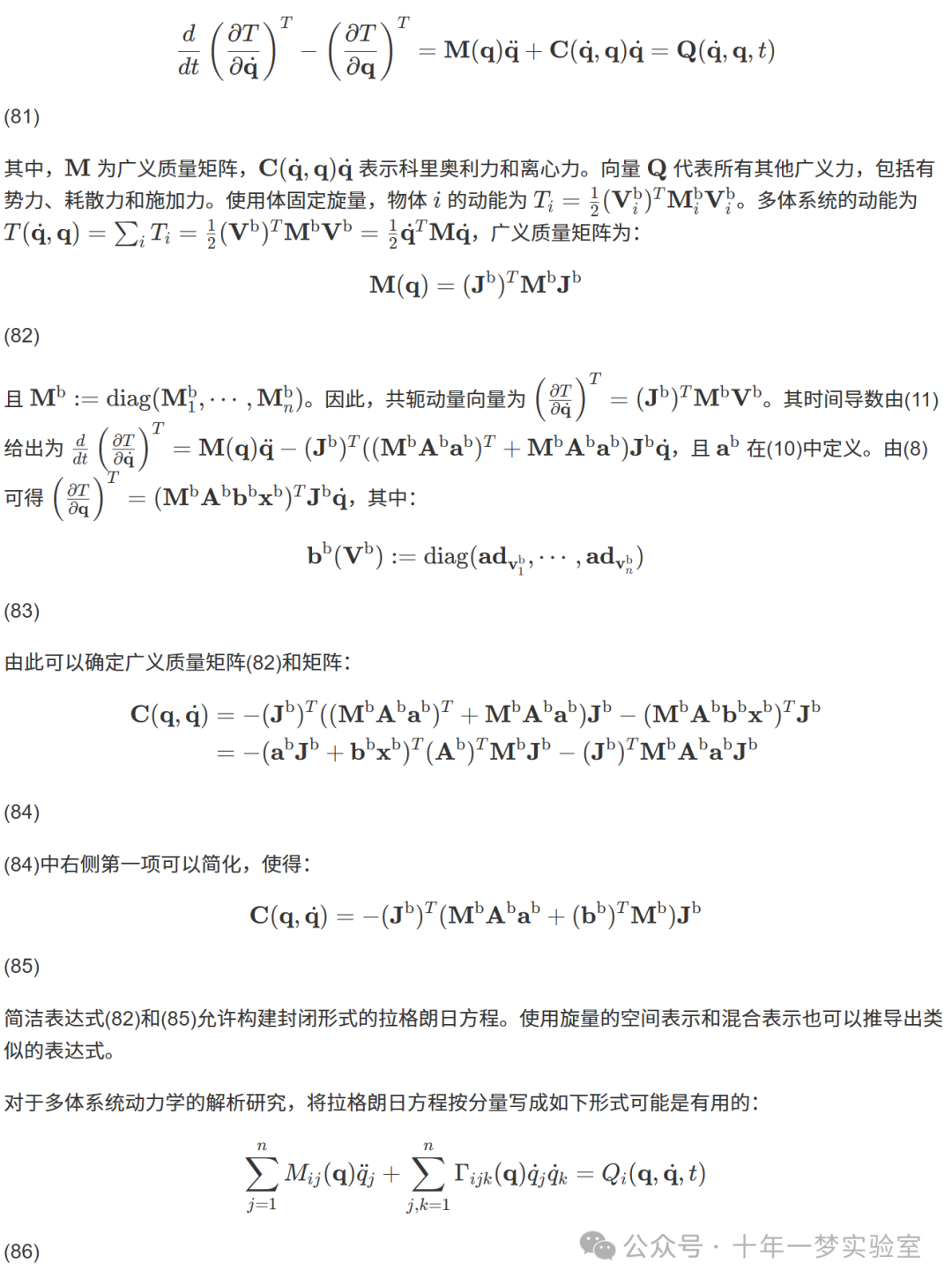
5.2 拉格朗日方程
多体系统(MBS)的运动方程可以作为以广义坐标表示的拉格朗日方程推导得出。为简化起见,省略了有势力,因此拉格朗日量仅为动能。那么方程呈现为以下形式:
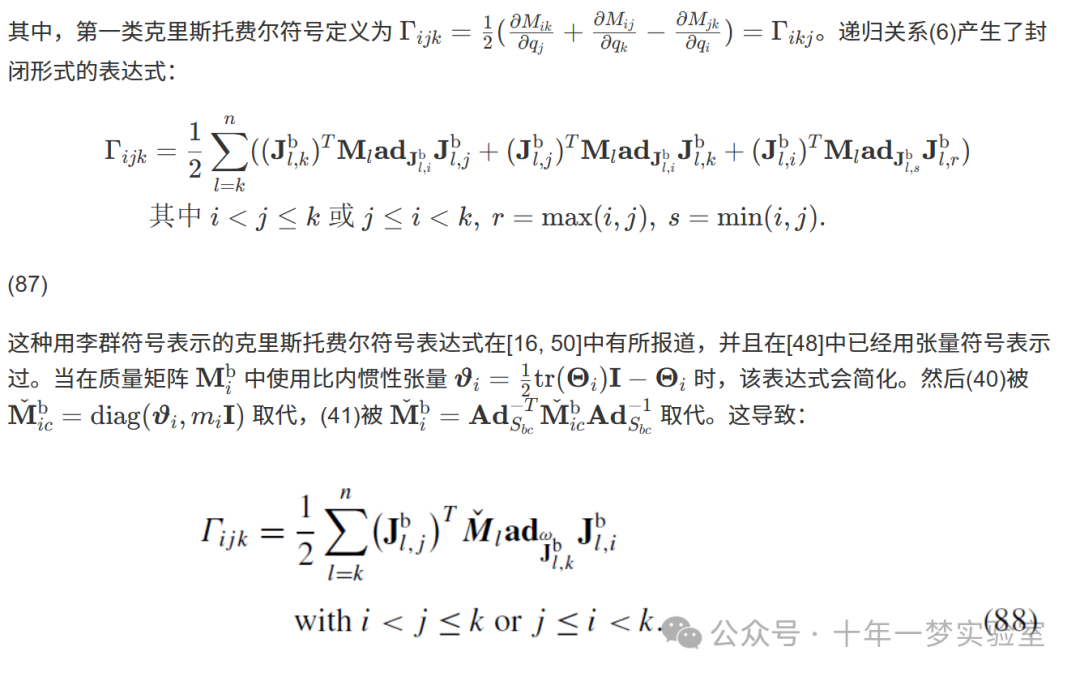
方程(87)在[50, 67, 68, 70, 71]中给出,方程(88)在[50]中给出。在这些出版物之前,方程(87)和(88)在[48, 49]中已用张量符号而非李群符号报道过。另一个值得一提的出版物是[19],其中使用类似的代数运算推导了拉格朗日方程。
上述运动方程(EOM)的封闭形式是使用体固定旋量推导出来的。使用空间旋量或混合旋量的潜在益处仍有待探索。
6 运动方程的导数
在许多情况下,需要多体系统运动学和动力学关于关节角度、几何参数或动力学参数的灵敏度信息。虽然刚体多体系统的运动方程对于动力学参数呈线性关系,但它们对广义坐标和几何形状存在非线性依赖。指数积公式为确定关于运动学参数的灵敏度提供了一种方法。
6.1 运动方程的灵敏度
运动方程的线性化(作为稳定性分析和控制器设计的基础)以及多体系统的最优控制需要关于广义坐标的梯度信息。由于体固定雅可比矩阵的二阶及更高阶导数(13)、空间雅可比矩阵的导数(21)以及混合雅可比矩阵的导数(26)都可以用螺旋积的代数封闭形式表达式给出,因此线性化的运动方程可以递归计算并以封闭形式表示。利用李群符号表示,这在文献[76]中有所报道。
同样的结果在文献[49]中已用张量符号给出。比较这两种表述方式可以再次发现,矩阵李群公式提供了一种抽象层次,能够得到紧凑的表达式。文献[51]报道了逆质量矩阵偏导数的封闭形式,这在研究多体系统的可控性时是必需的。使用旋量的体固定表示,文献[3, 35]报道了递归的O(n)
算法。
6.2 几何灵敏度
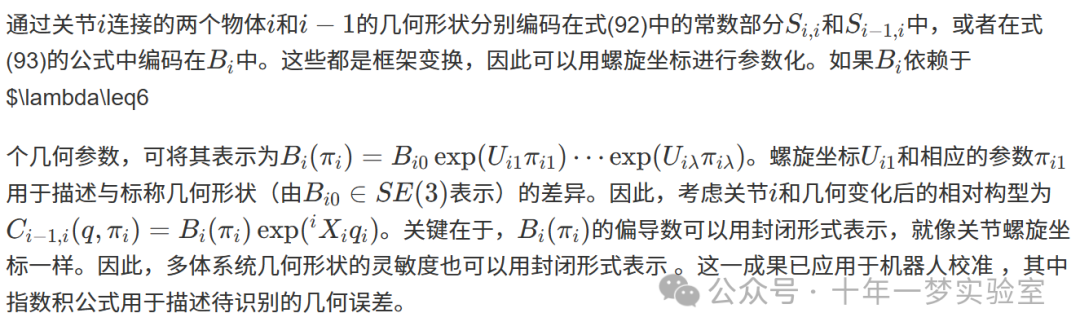
优化多体系统的设计需要关于几何参数的灵敏度信息。文献[35]报道了一种递归算法,其并行实现见文献[3],在这些文献中,偏导数是逐个计算的。李群公式则给出了一个通用的封闭形式表达式。为此,指数积公式(93)扩展如下。
6.3 运动方程的时间导数
对于建模为刚性体多体系统且由弹性驱动器(即所谓的串联弹性驱动器)驱动的机器人操作器,设计基于反馈线性化和平面性的控制器时,需要逆动力学解Q(t)
的时间导数 ,即需要运动方程的一阶和二阶时间导数。文献[18]提出了经典递归牛顿 - 欧拉逆动力学算法在体固定表示下的扩展。正如预期的那样,这些关系非常复杂。而本文提出的基于李群的逆动力学算法公式能够产生相当紧凑且可靠的算法。文献[61]针对体固定和混合版本给出了相关内容。
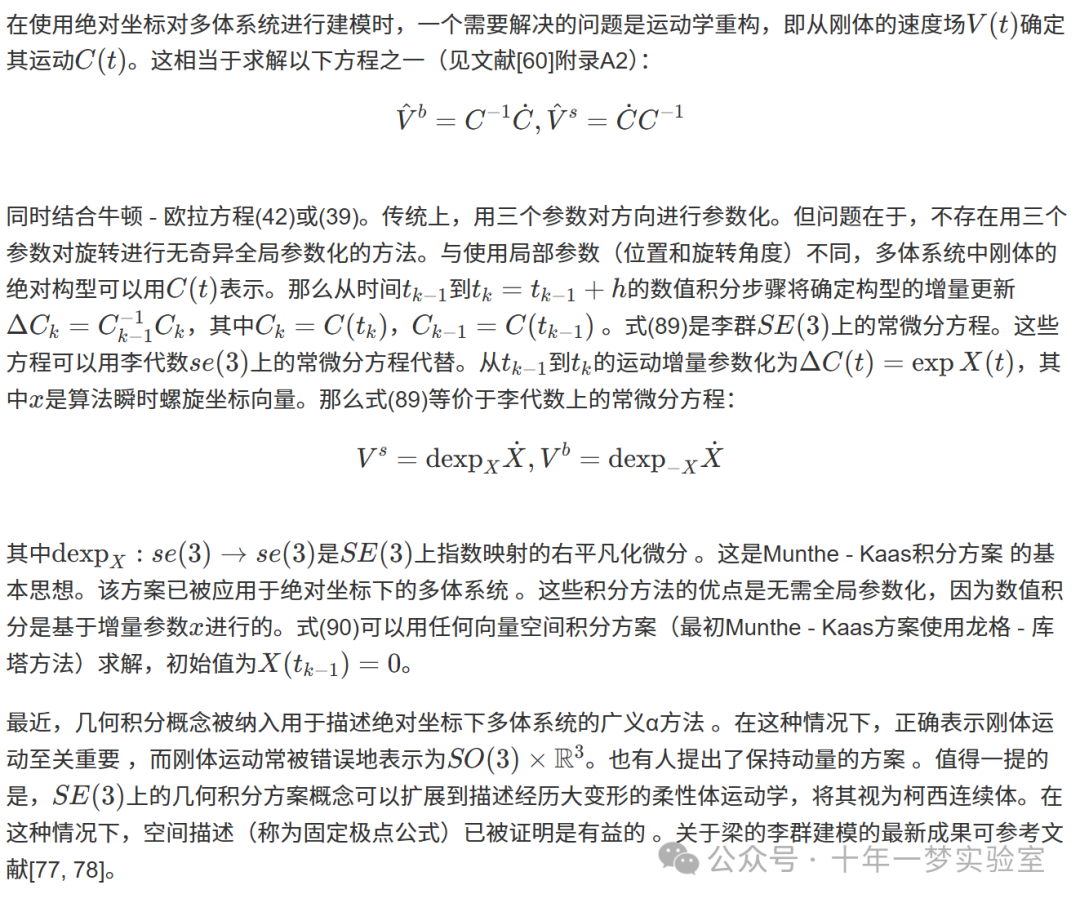
7 几何积分
本文主要关注基于相对(关节)坐标的多体系统建模。另外,多体系统运动学也可以用绝对坐标来描述
8 结论与展望
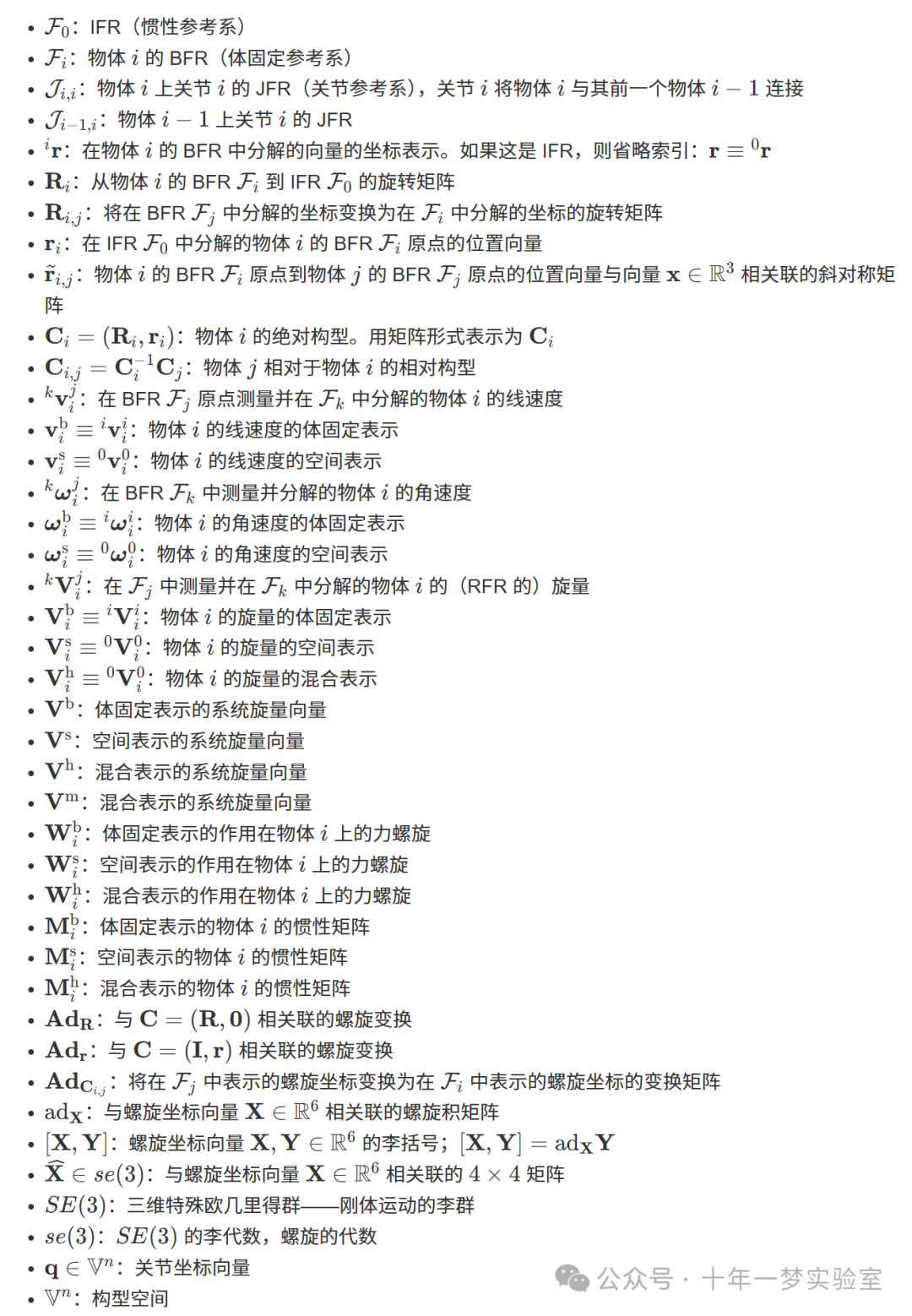
附录A:基本运动学关系总结
作为前提,[60]中推导的运动学关系总结如下。用

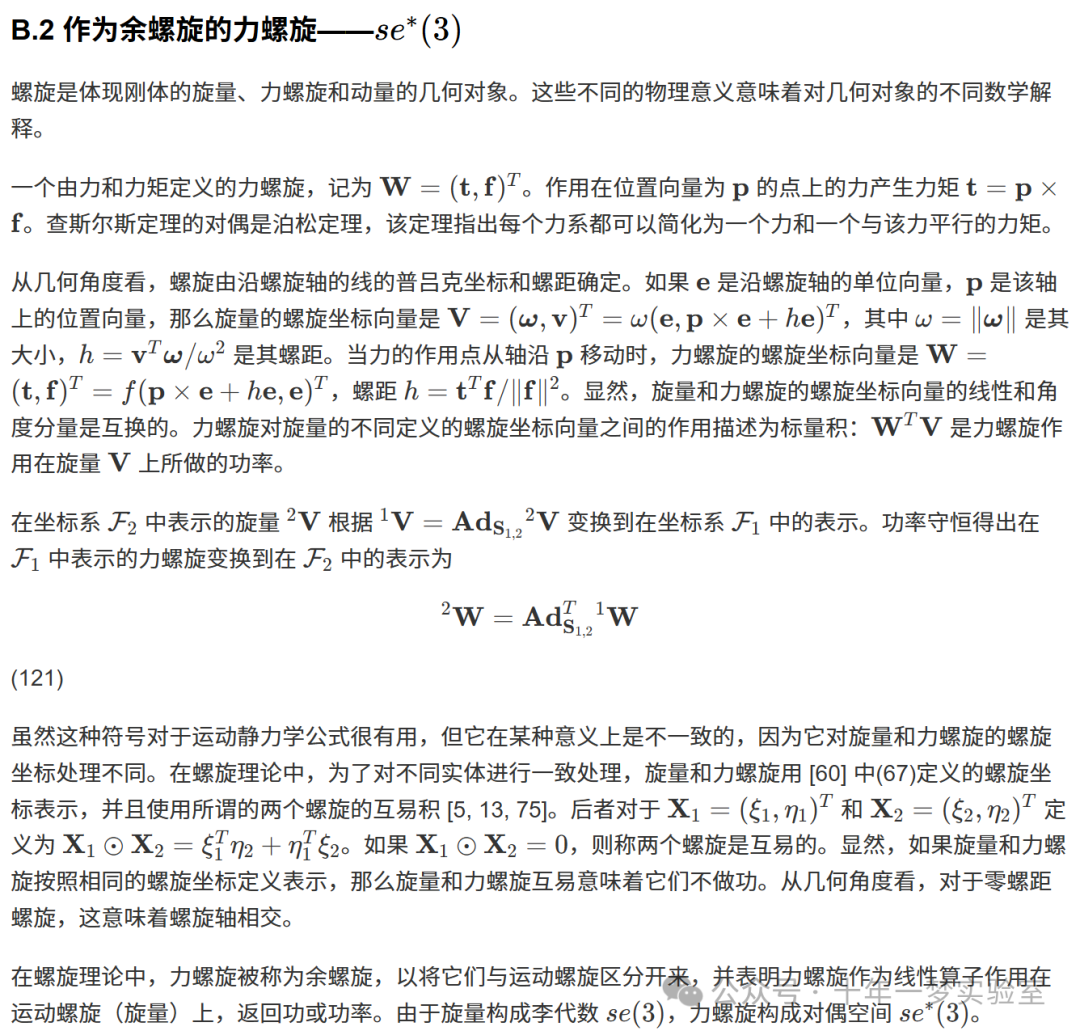
附录B:刚体运动和李群SE(3)
关于螺旋和运动李群 SE(3)
的介绍,读者可参考教科书 [5, 47, 63, 75]。

附录 C:术语表
参考文献
Anderson, K.: An order n formulation for the motion simulation of general multi-rigid-body constrained systems. Comput. Struct. 43(3), 565–579 (1992)
安德森,K.:一般多刚体约束系统运动仿真的O(n)公式。《计算机与结构》43(3),565 - 579 (1992)Anderson, K.S., Critchley, J.H.: Improved ‘order-N’ performance algorithm for the simulation of constrained multi-rigid-body dynamic systems. Multibody Syst. Dyn. 9(2), 185–212 (2003)
安德森,K.S.,克里奇利,J.H.:用于约束多刚体动力系统仿真的改进“O(N)”性能算法。《多体系统动力学》9(2),185 - 212 (2003)Anderson, K.S., Hsu, Y.: Order-(n + m) direct differentiation determination of design sensitivity for constrained multibody dynamic systems. Struct. Multidiscip. Optim. 26, 171–182 (2004)
安德森,K.S.,许,Y.:约束多体动力系统设计灵敏度的O(n + m)直接微分确定方法。《结构多学科优化》26,171 - 182 (2004)Angles, J., Lee, S.: The formulation of dynamical equations of holonomic mechanical systems using a natural orthogonal complement. J. Appl. Mech. 55, 243–244 (1988)
安格莱斯,J.,李,S.:利用自然正交补建立完整力学系统的动力学方程。《应用力学杂志》55,243 - 244 (1988)Angeles, J.: Fundamentals of Robotic Mechanical Systems, 2nd edn. Springer, Berlin (2003)
安杰利斯,J.:《机器人机械系统基础(第二版)》。施普林格出版社,柏林 (2003)Bae, D.S., Hwang, R.S., Haug, E.J.: A recursive formulation for real-time dynamic simulation of mechanical systems. J. Mech. Des. 113(2), 158–166 (1988)
裴,D.S.,黄,R.S.,豪格,E.J.:机械系统实时动态仿真的递归公式。《机械设计杂志》113(2),158 - 166 (1988)Bae, D.S., et al.: A generalized recursive formulation for constrained flexible multibody dynamics. Int. J. Numer. Methods Eng. 50, 1841–1859 (2001)
裴,D.S.等人:约束柔性多体动力学的广义递归公式。《国际数值方法工程杂志》50,1841 - 1859 (2001)Benedict, C.E., Tesar, D.: Model formulation of complex mechanisms with multiple inputs: part I - geometry. J. Mech. Des. 100(4), 747–754 (1978)
贝内迪克特,C.E.,特萨尔,D.:具有多个输入的复杂机构的模型建立:第一部分 - 几何。《机械设计杂志》100(4),747 - 754 (1978)Bongardt, B., Kirchner, F.: Newton–Euler equations in general coordinates. In: Proc. of Mathematics of Robotics (IMA), September 9–11, St Anne’s College, University of Oxford (2015)
邦加特,B.,基希纳,F.:一般坐标下的牛顿 - 欧拉方程。收录于《机器人数学会议论文集(IMA)》,9月9 - 11日,牛津大学圣安妮学院 (2015)Borri, M., Bottasso, C.L., Trainelli, L.: Integration of elastic multibody systems by invariant conserving/dissipating algorithms - part II: numerical schemes and applications. Comput. Methods Appl. Mech. Eng. 190(29/30), 3701–3733 (2001)
博里,M.,博塔索,C.L.,特拉内利,L.:通过不变量守恒/耗散算法对弹性多体系统进行积分 - 第二部分:数值方法与应用。《应用力学与工程计算方法》190(29/30),3701 - 3733 (2001)Borri, M., Bottasso, C.L., Trainelli, L.: An invariant - preserving approach to robust finite - element multibody simulation. Z. Angew. Math. Mech. 83(10), 663–676 (2003)
博里,M.,博塔索,C.L.,特拉内利,L.:一种用于稳健有限元多体仿真的不变量保持方法。《应用数学与力学杂志》83(10),663 - 676 (2003)Bottasso, C.L., Borri, M.: Integrating finite rotations. Comput. Methods Appl. Mech. Eng. 164, 307–331 (1998)
博塔索,C.L.,博里,M.:有限旋转的积分。《应用力学与工程计算方法》164,307 - 331 (1998)Bottema, O., Roth, B.: Theoretical Kinematics. Dover, New York (1990)
博特马,O.,罗斯,B.:《理论运动学》。多佛出版社,纽约 (1990)Bremer, H.: Elastic Multibody Dynamics. Springer, Berlin (2010)
布雷默,H.:《弹性多体动力学》。施普林格出版社,柏林 (2010)Brockett, R.W.: Robotic manipulators and the product of exponentials formula. In: Mathematical Theory of Networks and Systems. Lecture Notes in Control and Information Sciences, vol. 58, pp. 120–129 (1984)
布罗克特,R.W.:机器人操作器与指数积公式。收录于《网络与系统的数学理论》。控制与信息科学讲义,第58卷,第120 - 129页 (1984)Brockett, R.W., Stokes, A., Park, F.: A geometrical formulation of the dynamical equations describing kinematic chains. IEEE Int. Conf. Robot. Autom. 2, 637–641 (1993)
布罗克特,R.W.,斯托克斯,A.,朴,F.:描述运动链动力学方程的几何公式。《电气与电子工程师协会国际机器人与自动化会议》2,637 - 641 (1993)Brüls, O., Cardona, A., Arnold, M.: Lie group generalized - alpha time integration of constrained flexible multibody systems. Mech. Mach. Theory 48, 121–137 (2012)
布鲁尔斯,O.,卡尔多纳,A.,阿诺德,M.:约束柔性多体系统的李群广义α时间积分。《机械与机器理论》48,121 - 137 (2012)Buondonno, G., De Luca, A.: A recursive Newton–Euler algorithm for robots with elastic joints and its application to control. 2015 IEEE/RSJ IROS, 5526–5532
布翁多诺,G.,德卢卡,A.:具有弹性关节机器人的递归牛顿 - 欧拉算法及其在控制中的应用。2015年电气与电子工程师协会/日本机器人学会智能机器人与系统国际会议,5526 - 5532Burdick, J.W.: An algorithm for generation of efficient manipulator dynamic equations. In: Proc. IEEE Int. Conf. Rob. and Automat. (ICRA), vol. 3, pp. 212–218 (1986)
伯迪克,J.W.:一种生成高效机器人动力学方程的算法。收录于《电气与电子工程师协会国际机器人与自动化会议论文集(ICRA)》,第3卷,第212 - 218页 (1986)Celledoni, E., Owren, B.: Lie group methods for rigid body dynamics and time integration on manifolds. Comput. Methods Appl. Mech. Eng. 19, 421–438 (1999)
塞莱多尼,E.,欧文,B.:用于刚体动力学和流形上时间积分的李群方法。《应用力学与工程计算方法》19,421 - 438 (1999)Chen, I.-M., Yang, G.: Kinematic calibration of modular reconfigurable robots using product - of - exponentials formula. J. Robot. Syst. 14(11), 807–821 (1997)
陈,I.-M.,杨,G.:利用指数积公式对模块化可重构机器人进行运动学标定。《机器人系统杂志》14(11),807 - 821 (1997)Chen, I - M., et al.: Local POE model for robot kinematic calibration. Mech. Mach. Theory 36(11–12), 1215–1239 (2001)
陈,I - M.等人:用于机器人运动学标定的局部指数积模型。《机械与机器理论》36(11 - 12),1215 - 1239 (2001)Chevallier, D.P.: Lie algebras, modules, dual quaternions and algebraic methods in kinematics. Mech. Mach. Theory 26(6), 613–627 (1991)
谢瓦利埃,D.P.:李代数、模、对偶四元数以及运动学中的代数方法。《机械与机器理论》26(6),613 - 627 (1991)Chevallier, D.P.: Lie groups and multibody dynamics formalism. In: Proc. EUROMECH Colloquium, Prague, vol. 320, pp. 1–20 (1994)
谢瓦利埃,D.P.:李群与多体动力学形式体系。收录于《欧洲力学学会研讨会论文集》,布拉格,第320卷,第1 - 20页 (1994)De Luca, A.: Decoupling and feedback linearization of robots with mixed rigid/elastic joints. Int. J. Robust Nonlinear Control 8, 965–977 (1998)
德卢卡,A.:具有混合刚性/弹性关节机器人的解耦与反馈线性化。《国际鲁棒与非线性控制杂志》8,965 - 977 (1998)Featherstone, R.: The calculation of robot dynamics using articulated - body inertias. Int. J. Robot. Res. 2(1), 13–30 (1983)
费瑟斯通,R.:利用铰接体惯量计算机器人动力学。《国际机器人研究杂志》2(1),13 - 30 (1983)Featherstone, R.: Robot Dynamics Algorithms. Kluwer Academic, Dordrecht (1987)
费瑟斯通,R.:《机器人动力学算法》。克鲁维尔学术出版社,多德雷赫特 (1987)Featherstone, R.: The acceleration vector of a rigid body. Int. J. Robot. Res. 20, 841–846 (2001)
费瑟斯通,R.:刚体的加速度向量。《国际机器人研究杂志》20,841 - 846 (2001)Featherstone, R.: Rigid Body Dynamics Algorithms. Springer, Berlin (2008)
费瑟斯通,R.:《刚体动力学算法》。施普林格出版社,柏林 (2008)Fijany, A.: Parallel O(logN) algorithms for computation of manipulator forward dynamics. IEEE Trans. Robot. Autom. 11(3), 389–400 (1995)
菲贾尼,A.:用于计算机器人正向动力学的并行O(logN)算法。《电气与电子工程师协会机器人与自动化汇刊》11(3),389 - 400 (1995)Gaćesa, M., Jelenić, G.: Modified fixed - pole approach in geometrically exact spatial beam finite elements. Finite Elem. Anal. Des. 99, 39–48 (2015)
加切萨,M.,耶莱尼奇,G.:几何精确空间梁有限元中的改进固定极点方法。《有限元分析与设计》99,39 - 48 (2015)Hervé, J.M.: Analyse Structurelle des Mécanismes par Groupe des Déplacements. Mech. Mach. Theory 13, 437–450 (1978)
埃尔韦,J.M.:用位移群对机构进行结构分析。《机械与机器理论》13,437 - 450 (1978)Hervé, J.M.: Intrinsic formulation of problems of geometry and kinematics of mechanisms. Mech. Mach. Theory 17(3), 179–184 (1982)
埃尔韦,J.M.:机构几何与运动学问题的内在公式。《机械与机器理论》17(3),179 - 184 (1982)Hollerbach, J.M.: A recursive Lagrangian formulation of manipulator dynamics and a comparative study of dynamics formulation complexity. IEEE Trans. Syst. Man Cybern. SMC - 10(11), 730–736 (1980)
霍勒巴赫,J.M.:机器人动力学的递归拉格朗日公式及动力学公式复杂度的比较研究。《电气与电子工程师协会系统、人与控制论汇刊》SMC - 10(11),730 - 736 (1980)Hsu, Y., Anderson, K.S.: Recursive sensitivity analysis for constrained multi - rigid - body dynamic systems design optimization. Struct. Multidiscip. Optim. 24, 312–324 (2002)
许,Y.,安德森,K.S.:约束多刚体动力系统设计优化的递归灵敏度分析。《结构多学科优化》24,312 - 324 (2002)Iserles, A., et al.: Lie - group methods. Acta Numer. 9, 215–365 (2000)
伊瑟尔斯,A.等人:李群方法。《数值学报》9,215 - 365 (2000)Jain, A.: Unified formulation of dynamics for serial rigid multibody systems. J. Guid. Control Dyn. 14(3), 531–542 (1991)
贾恩,A.:串联刚性多体系统动力学的统一公式。《制导、控制与动力学杂志》14(3),531 - 542 (1991)Jain, A., Rodriguez, G.: Diagonalized Lagrangian robot dynamics. IEEE Trans. Robot. Autom. 11(4), 571–584 (1995)
贾恩,A.,罗德里格斯,G.:对角化拉格朗日机器人动力学。《电气与电子工程师协会机器人与自动化汇刊》11(4),571 - 584 (1995)Jungnickel, U., Maisser, P.: Dynamiksimulation von Mehrkörpersystemen mit geschlossenensn kinematischen Ketten mittels Algebrodifferentialgleichungen. Report No. 26, Institut für Mechanik, Akademie der Wissenschaften der DDR (1990). ISSN 0232 - 5330
容尼克,U.,迈塞尔,P.:利用代数微分方程对具有封闭运动链的多体系统进行动力学仿真。报告第26号,民主德国科学院力学研究所 (1990)。国际标准连续出版物编号0232 - 5330Kane, T.R., Levinson, D.A.: Dynamics: Theory and Applications. Mcgraw Hill, New York (1985)
凯恩,T.R.,莱文森,D.A.:《动力学:理论与应用》。麦格劳 - 希尔出版社,纽约 (1985)Krysl, P., Endres, L.: Explicit Newmark/Verlet algorithm for time integration of the rotational dynamics of rigid bodies. Int. J. Numer. Methods Eng. 62, 2154–2177 (2005)
克里斯尔,P.,恩德雷斯,L.:用于刚体旋转动力学时间积分的显式纽马克/维勒算法。《国际数值方法工程杂志》62卷,2154 - 2177页(2005年)Legnani, G.: A homogeneous matrix approach to 3D kinematics and dynamics - I. Theory. Mech. Mach. Theory 31(5), 573–587 (1996)
莱尼亚尼,G.:三维运动学和动力学的齐次矩阵方法 - 第一部分:理论。《机械与机器理论》31卷第5期,573 - 587页(1996年)Legnani, G.: A homogeneous matrix approach to 3D kinematics and dynamics - II. Applications to chains of rigid bodies and serial manipulators. Mech. Mach. Theory 31(5), 589–605 (1996)
莱尼亚尼,G.:三维运动学和动力学的齐次矩阵方法 - 第二部分:在刚体链和串联机器人中的应用。《机械与机器理论》31卷第5期,589 - 605页(1996年)Lilly, W., Orin, D.E.: Alternate formulations for the manipulator inertia matrix. Int. J. Robot. Res. 10(1), 64–74 (1991)
利利,W.,奥林,D.E.:机器人惯性矩阵的替代公式。《国际机器人研究杂志》10卷第1期,64 - 74页(1991年)Liu, Y.: Screw - matrix method in dynamics of multibody systems. Acta Mech. Sin. 4(2), 165–174 (1988)
刘,Y.:多体系统动力学中的螺旋矩阵法。《力学学报(英文版)》4卷第2期,165 - 174页(1988年)Luh, J.Y.S., Walker, M.W., Paul, R.P.C.: On - line computational scheme for mechanical manipulators. J. Dyn. Syst. Meas. Control 102(2), 69–76 (1980)
卢,J.Y.S.,沃克,M.W.,保罗,R.P.C.:机械机器人的在线计算方案。《动力系统、测量与控制杂志》102卷第2期,69 - 76页(1980年)Lynch, K.M., Park, F.C.: Modern Robotics. Cambridge University Press, Cambridge (2017)
林奇,K.M.,帕克,F.C.:《现代机器人学》。剑桥大学出版社,剑桥(2017年)Maißer, P.: Analytische Dynamik von Mehrkörpersystemen. Z. Angew. Math. Mech. 68(10), 463–481 (1988)
迈塞尔,P.:多体系统的分析动力学。《应用数学与力学杂志》68卷第10期,463 - 481页(1988年)Maisser, P.: Differential - geometric methods in multibody dynamics. Nonlinear Anal. 30(8), 5127–5133 (1997)
迈塞尔,P.:多体动力学中的微分几何方法。《非线性分析》30卷第8期,5127 - 5133页(1997年)Müller, A., Maisser, P.: Lie group formulation of kinematics and dynamics of constrained MBS and its application to analytical mechanics. Multibody Syst. Dyn. 9, 311–352 (2003)
米勒,A.,迈塞尔,P.:受约束多体系统运动学和动力学的李群公式及其在分析力学中的应用。《多体系统动力学》9卷,311 - 352页(2003年)Müller, A.: Partial derivatives of the inverse mass matrix of multibody systems via its factorization. IEEE Trans. Robot. 23(1), 164–168 (2007)
米勒,A.:通过因式分解求多体系统逆质量矩阵的偏导数。《IEEE机器人学汇刊》23卷第1期,164 - 168页(2007年)Müller, A.: Generic mobility of rigid body mechanisms. Mech. Mach. Theory 44(6), 1240–1255 (2009)
米勒,A.:刚体机构的一般运动性。《机械与机器理论》44卷第6期,1240 - 1255页(2009年)Müller, A.: MBS motion equation without explicit definition of body - fixed reference frames, 38 mechanisms and robotics conference (MECH). ASME 2014 International Design Engineering Technical Conferences, August 12–15, 2014, Buffalo, NY
米勒,A.:无需明确定义体固定参考系的多体系统运动方程,第38届机构与机器人学会议(MECH)。美国机械工程师协会2014年国际设计工程技术会议,2014年8月12 - 15日,纽约州布法罗Müller, A.: Higher derivatives of the kinematic mapping and some applications. Mech. Mach. Theory 76, 70–85 (2014)
米勒,A.:运动学映射的高阶导数及其一些应用。《机械与机器理论》76卷,70 - 85页(2014年)Müller, A.: Derivatives of screw systems in body - fixed representation. In: Lenarcic, J., Khatib, O. (eds.) Advances in Robot Kinematics (ARK). Springer, Berlin (2014)
米勒,A.:体固定表示下螺旋系统的导数。收录于:莱纳尔契奇,J.,哈提卜,O.(编)《机器人运动学进展(ARK)》。施普林格出版社,柏林(2014年)Müller, A.: Recursive higher - order constraints for linkages with lower kinematic pairs. Mech. Mach. Theory 100, 33–43 (2016)
米勒,A.:具有低副运动链的递归高阶约束。《机械与机器理论》100卷,33 - 43页(2016年)Müller, A., Terze, Z.: The significance of the configuration space Lie group for the constraint satisfaction in numerical time integration of multibody systems. Mech. Mach. Theory 82, 173–202 (2014)
米勒,A.,特尔泽,Z.:构型空间李群在多体系统数值时间积分中满足约束条件的意义。《机械与机器理论》82卷,173 - 202页(2014年)Müller, A.: A note on the motion representation and configuration update in time stepping schemes for the constrained rigid body. BIT Numer. Math. 56(3), 995–1015 (2016)
米勒,A.:关于受约束刚体时间步长方案中运动表示和构型更新的注记。《BIT数值数学》56卷第3期,995 - 1015页(2016年)Müller, A.: Coordinate mappings for rigid body motions. J. Comput. Nonlinear Dyn. 12(2), 021010 (2016)
米勒,A.:刚体运动的坐标映射。《计算非线性动力学杂志》12卷第2期,021010(2016年)Müller, A.: Screw and Lie group theory in multibody kinematics - motion representation and recursive kinematics of tree - topology systems. Multibody Syst. Dyn. (2017). doi:10.1007/s11044 - 017 - 9582 - 7
米勒,A.:多体运动学中的螺旋和李群理论 - 树形拓扑系统的运动表示和递归运动学。《多体系统动力学》(2017年)。doi:10.1007/s11044 - 017 - 9582 - 7Müller, A.: Recursive second - order inverse dynamics for serial manipulators. In: IEEE Int. Conf. Robotics Automations (ICRA), May 29–June 3, 2017, Singapore
米勒,A.:串联机器人的递归二阶逆动力学。收录于:IEEE国际机器人与自动化会议(ICRA),2017年5月29日 - 6月3日,新加坡Munthe - Kaas, H.: High order Runge–Kutta methods on manifolds. Appl. Numer. Math. 29, 115–127 (1999)
蒙特 - 卡斯,H.:流形上的高阶龙格 - 库塔方法。《应用数值数学》29卷,115 - 127页(1999年)Murray, R.M., Li, Z., Sastry, S.S.: A Mathematical Introduction to Robotic Manipulation. CRC Press, Boca Raton (1994)
默里,R.M.,李,Z.,萨斯特里,S.S.:《机器人操作的数学导论》。CRC出版社,博卡拉顿(1994年)Naudet, J., Lefeber, D., Daerden, F., Terze, Z.: Forward dynamics of open - loop multibody mechanisms using an efficient recursive algorithm based on canonical momenta. Multibody Dyn. 10(1), 45–59 (2003)
诺代,J.,勒费弗尔,D.,戴尔登,F.,特尔泽,Z.:基于正则动量的高效递归算法求解开环多体机构的正向动力学。《多体动力学》10卷第1期,45 - 59页(2003年)Orin, D., Schrader, W.: Efficient computation of the Jacobian for robot manipulators. Int. J. Robot. Res. 3(4) (1984)
奥林,D.,施拉德,W.:机器人操作器雅可比矩阵的高效计算。《国际机器人研究杂志》3卷第4期(1984年)Palli, G., Melchiorri, C., De Luca, A.: On the feedback linearization of robots with variable joint stiffness. In: IEEE Int. Conf. Rob. Aut. (IROS), Pasadena, CA, USA May 19–23 (2008)
帕利,G.,梅尔基奥里,C.,德卢卡,A.:关于可变关节刚度机器人的反馈线性化。收录于:IEEE国际机器人与自动化会议(IROS),2008年5月19 - 23日,美国加利福尼亚州帕萨迪纳Park, F.C.: Computational aspects of the product - of - exponentials formula for robot kinematics. IEEE Trans. Autom. Control 39(3), 643–647 (1994)
帕克,F.C.:机器人运动学指数积公式的计算问题。《IEEE自动控制汇刊》39卷第3期,643 - 647页(1994年)Park, F.C., Bobrow, J.E., Ploen, S.R.: A Lie group formulation of robot dynamics. Int. J. Robot. Res. 14(6), 609–618 (1995)
帕克,F.C.,鲍勃罗,J.E.,普洛恩,S.R.:机器人动力学的李群公式。《国际机器人研究杂志》14卷第6期,609 - 618页(1995年)Park, J., Chung, W.K.: Geometric integration on Euclidean group with application to articulated multibody systems. IEEE Trans. Robot. Autom. 21(5), 850–863 (2005)
朴,J.,郑,W.K.:欧几里得群上的几何积分及其在多关节多体系统中的应用。《IEEE机器人与自动化汇刊》21卷第5期,850 - 863页(2005年)Park, F.C., Kim, M.W.: Lie theory, Riemannian geometry, and the dynamics of coupled rigid bodies. Z. Angew. Math. Phys. 51, 820–834 (2000)
帕克,F.C.,金,M.W.:李理论、黎曼几何与耦合刚体的动力学。《应用数学与物理杂志》51卷,820 - 834页(2000年)Ploen, S.R., Park, F.C.: A Lie group formulation of the dynamics of cooperating robot systems. Robot. Auton. Syst. 21, 279–287 (1997)
普洛恩,S.R.,帕克,F.C.:协作机器人系统动力学的李群公式。《机器人与自主系统》21卷,279 - 287页(1997年)Rodriguez, G.: Kalman filtering, smoothing, and recursive robot arm forward and inverse dynamics. IEEE J. Robot. Autom. RA - 3(6), 624–639 (1987)
罗德里格斯,G.:卡尔曼滤波、平滑以及机器人手臂的递归正向和逆向动力学。《IEEE机器人与自动化杂志》RA - 3卷第6期,624 - 639页(1987年)Rodriguez, G., Jain, A., Kreutz - Delgado, K.: A spatial operator algebra for manipulator modelling and control. Int. J. Robot. Res. 10(4), 371–381 (1991)
罗德里格斯,G.,贾恩,A.,克罗伊茨 - 德尔加多,K.:用于机器人建模与控制的空间算子代数。《国际机器人研究杂志》10卷第4期,371 - 381页(1991年)Rodriguez, G., Jain, A., Kreutz - Delgado, K.: Spatial operator algebra for multibody system dynamics. J. Astronaut. Sci. 40, 27–50 (1992)
罗德里格斯,G.,贾恩,A.,克罗伊茨 - 德尔加多,K.:多体系统动力学的空间算子代数。《航天科学杂志》40卷,27 - 50页(1992年)Selig, J.: Geometric Fundamentals of Robotics. Monographs in Computer Science Series. Springer, New York (2005)
塞利格,J.:《机器人学的几何基础》。计算机科学系列专著。施普林格出版社,纽约(2005年)Sohl, G.A., Bobrow, J.E.: A recursive multibody dynamics and sensitivity algorithm for branched kinematic chains. J. Dyn. Syst. Meas. Control 123, 391–399 (2001)
索尔,G.A.,鲍勃罗,J.E.:分支运动链的递归多体动力学和灵敏度算法。《动力系统、测量与控制杂志》123卷,391 - 399页(2001年)Sonneville, V., Cardona, A., Brüls, O.: Geometrically exact beam finite element formulated on the special Euclidean group SE(3). Comput. Methods Appl. Mech. Eng. 268(1), 451–474 (2014)
松内维尔,V.,卡尔多纳,A.,布鲁尔斯,O.:基于特殊欧几里得群SE(3)的几何精确梁有限元。《应用力学与工程计算方法》268卷第1期,451 - 474页(2014年)Sonneville, V., Brüls, O.: A formulation on the special Euclidean group for dynamic analysis of multibody systems. J. Comput. Nonlinear Dyn. 9(4), 041002 (2014)
松内维尔,V.,布鲁尔斯,O.:基于特殊欧几里得群的多体系统动力学分析公式。《计算非线性动力学杂志》9卷第4期,041002(2014年)Stelzle, W., Kecskeméthy, A., Hiller, M.: A comparative study of recursive methods. Arch. Appl. Mech. 66, 9–19 (1995)
施特尔茨勒,W.,凯克斯克梅蒂,A.,希勒,M.:递归方法的比较研究。《应用力学档案》66卷,9 - 19页(1995年)Terze, Z., Müller, A., Zlatar, D.: Lie - group integration method for constrained multibody systems in state space. Multibody Syst. Dyn. 34(3), 275–305 (2015). doi:10.1007/s11044 - 014 - 9439 - 2
特尔泽,Z.,米勒,A.,兹拉塔尔,D.:状态空间中受约束多体系统的李群积分方法。《多体系统动力学》34卷第3期,275 - 305页(2015年)。doi:10.1007/s11044 - 014 - 9439 - 2Terze, Z., Müller, A., Zlatar, D.: An angular momentum and energy conserving Lie - group integration scheme for rigid body rotational dynamics originating from Störmer–Verlet algorithm. J. Comput. Nonlinear Dyn. 10(5), 051005 (2015). 11 pages. doi:10.1115/1.4028671
特尔泽,Z.,米勒,A.,兹拉塔尔,D.:源于斯特默 - 维勒算法的刚体旋转动力学的角动量和能量守恒李群积分格式。《计算非线性动力学杂志》10卷第5期,051005(2015年)。11页。doi:10.1115/1.4028671Thomas, M., Tesar, D.: Dynamic modeling of serial manipulator arms. J. Dyn. Syst. Meas. Control 104(3), 218–228 (1982)
托马斯,M.,特萨尔,D.:串联机器人手臂的动力学建模。《动力系统、测量与控制杂志》104卷第3期,218 - 228页(1982年)Uicker, J.J., Ravani, B., Sheth, P.N.: Matrix Methods in the Design Analysis of Mechanisms and Multibody Systems. Cambridge University Press, Cambridge (2013)
尤克,J.J.,拉瓦尼,B.,谢思,P.N.:《机构与多体系统设计分析中的矩阵方法》。剑桥大学出版社,剑桥(2013年)Wittenburg, J.: Dynamics of Systems of Rigid Bodies. B. G. Teubner, Stuttgart (1977)
维滕堡,J.:《刚体系统动力学》。B. G. 蒂宾纳出版社,斯图加特(1977年)Yamane, K., Nakamura, Y.: Comparative study on serial and parallel forward dynamics algorithms for kinematic chains. Int. J. Robot. Res. 28, 622–629 (2009)
山根,K.,中村,Y.:运动链的串行和并行正向动力学算法的比较研究。《国际机器人研究杂志》28卷,622 - 629页(2009年)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









