






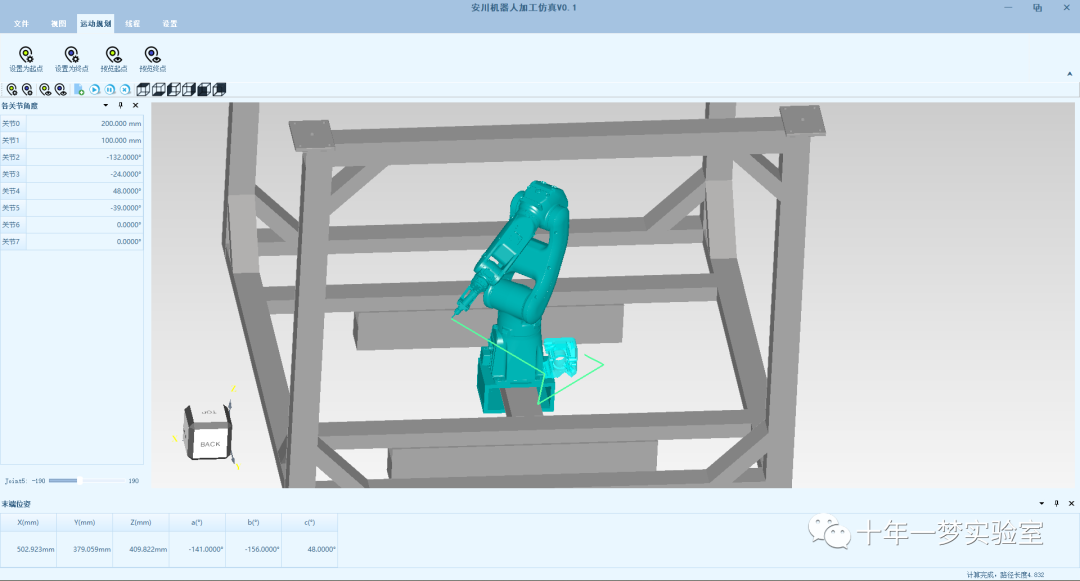
 主界面
主界面
该仿真器通过加载障碍物模型,设置关节起始配置,设置关节终点配置(后续可设置多个终点),再之后开启运动规划线程即可实现机械臂的避障运动规划。
机械臂基本操作
该软件基于QT开发,OpenCascade作为显示内核,借助RoboticsLibrary库作为为运动学正逆解计算、碰撞检测和运动规划引擎。该软件可以实现以下功能:1.DH坐标系形状的绘制。2.移动机械臂的连杆在场景中的位置。3.场景的gif以及视频录制。4.滑动条设置关节位置……
运动规划操作演示视频
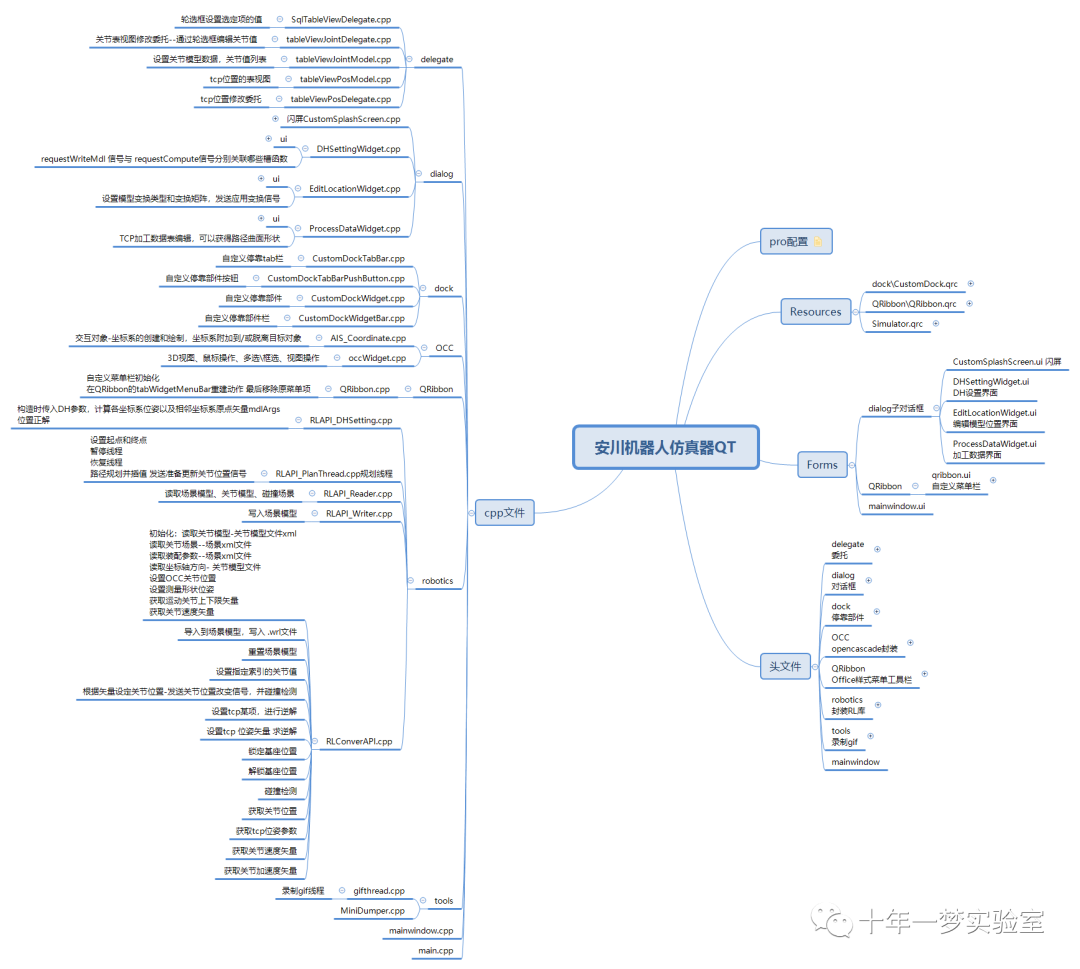
程序框架
部分代码:
封装的RLAPI接口:
#include "RLConvertAPI.h"
//=======================================================================
//function : RLConvertAPI
//purpose : *
//=======================================================================
RLConvertAPI::RLConvertAPI(QString &JointMdlFile, QString &JointSgFile, QString &JointModelFile,
QObject *parent) : QObject(parent)
,mJointMdlFileName(JointMdlFile)
,mJointSgFileName(JointSgFile)
,mJointModelFilePath(JointModelFile)
{
aWriterAPI = new RLAPI_Writer;
aReaderAPI = new RLAPI_Reader;
}
//=======================================================================
//function : RLConvertAPI
//purpose : *
//=======================================================================
RLConvertAPI::~RLConvertAPI()
{
delete aReaderAPI;
aReaderAPI = nullptr;
delete aWriterAPI;
aWriterAPI = nullptr;
}
//=======================================================================
//function : LoadFiles
//purpose : * 加载文件
//=======================================================================
void RLConvertAPI::InitLoadData()
{
if(aReaderAPI==nullptr)
aReaderAPI = new RLAPI_Reader;
emit RLSatutsChanged(RLStatus::ReadingMdlXML);
aReaderAPI->ReadModelXMLFIle(mJointMdlFileName);
emit RLSatutsChanged(RLStatus::ReadingSceneXML);
aReaderAPI->ReadSceneXMLFile(mJointSgFileName);
emit RLSatutsChanged(RLStatus::ParsingAssembleArgs);
aReaderAPI->ReadAssembleArgs(mJointSgFileName);
emit RLSatutsChanged(RLStatus::ParsingMotionArgs);
aReaderAPI->ReadAixsDirection(mJointMdlFileName);
emit RLSatutsChanged(RLStatus::ReadingJointFiles);
aReaderAPI->ReadJointModels(mJointModelFilePath);
SetJointValue(aReaderAPI->JointModel->getHomePosition());
aReaderAPI->MeasureAISShape->SetLocalTransformation(aReaderAPI->MeasureModelTrsf);
MotionMaxValues = aReaderAPI->JointModel->getMaximum();
MotionMinValues = aReaderAPI->JointModel->getMinimum();
MotionSpeedValues = aReaderAPI->JointModel->getSpeed();
}
//=======================================================================
//function : ImportSceneModel
//purpose : * 写入场景模型vrml文件 .wrl文件//
//=======================================================================
void RLConvertAPI::ImportSceneModel(const QString &theName)
{
mImportModelFileName = theName;
QFileInfo aInfo(mImportModelFileName);
QString Path = aInfo.filePath().remove(aInfo.fileName());
QString theVrmlFile(Path+aInfo.baseName()+".wrl");
aInfo.setFile(theVrmlFile);
if(!aInfo.exists())
{
//1、从形状构建网格 build the mesh from the shape
Handle(Poly_Triangulation) aMesh = aWriterAPI->BuildMesh(aReaderAPI->ReadAModelFile(theName)->Shape());
//2、生成 generate a vrml file that has the same base name
aWriterAPI->WriteMeshToVrml(aMesh,theVrmlFile);
}
//3、创建场景VRML文件creat the scene vrml file
aWriterAPI->GenerateSceneVrmlFile(theVrmlFile ,aReaderAPI->SceneVrmlFileName);
//4、创建场景XML文件creat the scene xml file
aWriterAPI->GenerateSceneXMLFile(aReaderAPI->SceneVrmlFileName,mJointSgFileName,aReaderAPI->JointModel->getDof());
}
//=======================================================================
//function : Reset
//purpose : *重置场景模型
//=======================================================================
void RLConvertAPI::ResetSceneModel()
{
delete aReaderAPI->SceneModel;
aReaderAPI->SceneModel = nullptr;
aReaderAPI->CollisionScene.reset();
aReaderAPI->AssembleTrsfs.clear();
aReaderAPI->MotionCenters.clear();
aReaderAPI->MeasureAISShape.reset(nullptr);
aReaderAPI->ReadSceneXMLFile(mJointSgFileName);//读取场景xml文件//
aReaderAPI->ReadAssembleArgs(mJointSgFileName);//读取装配参数//
SetJointValue(aReaderAPI->JointModel->getHomePosition());//设置关节位置:关节模型的 home位置//
aReaderAPI->MeasureAISShape->SetLocalTransformation(aReaderAPI->MeasureModelTrsf);//设置测量模型位姿//
}
//=======================================================================
//function : SetIndexedJointValue
//purpose : *设置指定索引的关节值//
//=======================================================================
void RLConvertAPI::SetIndexedJointValue(const int &index, const double &angle)
{
rl::mdl::Kinematic* aKinematic = dynamic_cast<rl::mdl::Kinematic*>(aReaderAPI->JointModel.get());//关节模型的运动学对象
rl::math::Vector pos = aKinematic->getPosition();//获取关节位置矢量//
if(aReaderAPI->JointType.at(index)==RLAPI_JointType::Revolute)//转动副//
pos(index) = angle * rl::math::constants::deg2rad;//rad used in calculate but deg used in ui
else if(aReaderAPI->JointType.at(index)==RLAPI_JointType::Prismatic)//移动副//
pos(index) = angle;
else//其他转动副//
pos(index) = angle * rl::math::constants::deg2rad;
SetJointValue(pos);//设置关节位置//
}
//=======================================================================
//function : SetJointValue
//purpose : * 根据矢量设定关节位置
//=======================================================================
void RLConvertAPI::SetJointValue(const rl::math::Vector &aVector)
{
rl::mdl::Kinematic* aKinematic = dynamic_cast<rl::mdl::Kinematic*>(aReaderAPI->JointModel.get());//运动学对象//
aKinematic->setPosition(aVector);//设置运动学对象的关节位置矢量//
aKinematic->forwardPosition();//位置正解//
for (std::size_t i = 0; i<aReaderAPI->SceneModel->getNumBodies(); ++i)//遍历场景模型的所有零件//
{
rl::math::Transform theTrans = aKinematic->getBodyFrame(i);//获取零件坐标系位姿//
aReaderAPI->CollisionScene->getModel(0)->getBody(i)->setFrame(theTrans);//获取碰撞场景中运动学对象的零件i,设置其位姿//
}
//设置一个累积Trsf来改变当前轴之后的轴//
gp_Trsf CumulativeTrsf;//set an Cumulative Trsf to change the axis after the current one
for(int i=0;i<aReaderAPI->MotionAxis.size();++i)
{
gp_Trsf aTrsf = aReaderAPI->JointAISShapes.at(i+1)->Shape().Location().Transformation();//下一关节形状的变换矩阵//
if(aReaderAPI->JointType.at(i)==RLAPI_JointType::Revolute)//转动副//
aTrsf.SetRotation(aReaderAPI->MotionAxis.at(i),aVector(i));//旋转变换//
else if(aReaderAPI->JointType.at(i)==RLAPI_JointType::Prismatic)//移动副//
aTrsf.SetTranslation(gp_Vec(aReaderAPI->MotionAxis.at(i).Direction())*aVector(i));//平移变换//
CumulativeTrsf.Multiply(aTrsf);//累积变换//
gp_Trsf workTrsf;//the real work Trsf ,E * Cumulative * Assemble
workTrsf.Multiply(CumulativeTrsf);//相对运动位姿//
workTrsf.Multiply(aReaderAPI->AssembleTrsfs.value(i));//装配参数:初始位姿矩阵//
//set the value JointAISShapes a public member in the class,when u change here ,u needn't to display them again in the main function, update the occWidget is enough
//在类中设置值JointAISShapes为公共成员,当你在这里更改时,你不需要在main函数中再次显示它们,更新occWidget就足够了
aReaderAPI->JointAISShapes.at(i+1)->SetLocalTransformation(workTrsf);
}
//here is the signal to update the occWidget这里是更新occWidget的信号//
emit JointPositionChanged();
IsCollision();//碰撞检测//
}
//=======================================================================
//function : SetIndexedInverseValue
//purpose : * 设置tcp某项,进行逆解//
//=======================================================================
bool RLConvertAPI::SetIndexedInverseValue(const int &index, const double &value)
{
if (rl::mdl::Kinematic* kinematic = dynamic_cast<rl::mdl::Kinematic*>(aReaderAPI->JointModel.get()))
{
rl::math::Transform transform = kinematic->getOperationalPosition(0);//当前tcp位置//
rl::math::Vector3 orientation = transform.linear().eulerAngles(2, 1, 0).reverse();//当前tcp欧拉角//
switch (index)
{
case 0:
case 1:
case 2:
transform.translation()(index) = value;//设置tcp的 x或y或z
break;
case 3:
transform.linear() = (
rl::math::AngleAxis(orientation.z(), rl::math::Vector3::UnitZ()) *
rl::math::AngleAxis(orientation.y(), rl::math::Vector3::UnitY()) *
rl::math::AngleAxis(value * rl::math::constants::deg2rad, rl::math::Vector3::UnitX())
).toRotationMatrix();//绕x轴旋转//
break;
case 4:
transform.linear() = (
rl::math::AngleAxis(orientation.z(), rl::math::Vector3::UnitZ()) *
rl::math::AngleAxis(value * rl::math::constants::deg2rad, rl::math::Vector3::UnitY()) *
rl::math::AngleAxis(orientation.x(), rl::math::Vector3::UnitX())
).toRotationMatrix();//绕y轴旋转//
break;
case 5:
transform.linear() = (
rl::math::AngleAxis(value * rl::math::constants::deg2rad, rl::math::Vector3::UnitZ()) *
rl::math::AngleAxis(orientation.y(), rl::math::Vector3::UnitY()) *
rl::math::AngleAxis(orientation.x(), rl::math::Vector3::UnitX())
).toRotationMatrix();//绕z轴旋转//
break;
default:
break;
}
rl::math::Vector q = kinematic->getPosition();//获取更新前关节位置//
rl::mdl::NloptInverseKinematics* aInverse = new rl::mdl::NloptInverseKinematics(kinematic);//位置逆解对象//
aInverse->setIterations(10000);//迭代次数//
aInverse->setDuration(std::chrono::milliseconds(500));//持续时间500ms//
for (std::size_t i = 0; i < kinematic->getOperationalDof(); ++i)//操作空间自由度//
{
aInverse->addGoal(i == 0 ? transform : kinematic->getOperationalPosition(i), i);//设置逆解目标//
}
bool solved = aInverse->solve();//逆解求解//
if (solved)//有解//
{
rl::math::Vector currentPos = aReaderAPI->JointModel->getPosition();//新的当前关节位置//
SetJointValue(currentPos);//更新关节位置//
delete aInverse;
return true;
}
else//无解//
{
kinematic->setPosition(q);//恢复求解前关节位置//
kinematic->forwardPosition();//正解计算//
delete aInverse;//释放逆解对象//
return false;//求解失败//
}
}
return false;
}
//=======================================================================
//function : SetInverseValue
//purpose : * 设置tcp 位姿矢量 求逆解//
//=======================================================================
bool RLConvertAPI::SetInverseValue(const QList<double> &TCPInfo)
{
Q_ASSERT(TCPInfo.size() == 6);
if (rl::mdl::Kinematic* kinematic = dynamic_cast<rl::mdl::Kinematic*>(aReaderAPI->JointModel.get()))
{
rl::math::Transform transform = kinematic->getOperationalPosition(0);
transform.translation()(0) = TCPInfo[0];
transform.translation()(1) = TCPInfo[1];
transform.translation()(2) = TCPInfo[2];
transform.linear() = (
rl::math::AngleAxis(TCPInfo[5], rl::math::Vector3::UnitZ()) *
rl::math::AngleAxis(TCPInfo[4], rl::math::Vector3::UnitY()) *
rl::math::AngleAxis(TCPInfo[3], rl::math::Vector3::UnitX())
).toRotationMatrix();
rl::math::Vector q = kinematic->getPosition();
rl::mdl::NloptInverseKinematics* aInverse = new rl::mdl::NloptInverseKinematics(kinematic);
aInverse->setIterations(10000);
aInverse->setDuration(std::chrono::milliseconds(500));
for (std::size_t i = 0; i < kinematic->getOperationalDof(); ++i)
{
aInverse->addGoal(i == 0 ? transform : kinematic->getOperationalPosition(i), i);
}
bool solved = aInverse->solve();
if (solved)
{
rl::math::Vector currentPos = aReaderAPI->JointModel->getPosition();
SetJointValue(currentPos);
delete aInverse;
return true;
}
else
{
kinematic->setPosition(q);
kinematic->forwardPosition();
delete aInverse;
return false;
}
}
return false;
}
//=======================================================================
//function : UnLockBasePosition
//purpose : * 锁定基座位置//
//=======================================================================
void RLConvertAPI::LockBasePosition()
{ //两个移动轴 设定最大 最小关节位置为当前关节位置//
aReaderAPI->JointModel->getJoint(0)->max(0) = aReaderAPI->JointModel->getPosition()(0);
aReaderAPI->JointModel->getJoint(0)->min(0) = aReaderAPI->JointModel->getPosition()(0);
aReaderAPI->JointModel->getJoint(1)->max(0) = aReaderAPI->JointModel->getPosition()(1);
aReaderAPI->JointModel->getJoint(1)->min(0) = aReaderAPI->JointModel->getPosition()(1);
}
//=======================================================================
//function : UnLockBasePosition
//purpose : * 解锁基座位置//
//=======================================================================
void RLConvertAPI::UnLockBasePosition()
{ //恢复两个移动轴关节位置上下限为默认设置//
aReaderAPI->JointModel->getJoint(0)->max(0) = MotionMaxValues[0];
aReaderAPI->JointModel->getJoint(0)->min(0) = MotionMinValues[0];
aReaderAPI->JointModel->getJoint(1)->max(0) = MotionMaxValues[1];
aReaderAPI->JointModel->getJoint(1)->min(0) = MotionMinValues[1];
}
//=======================================================================
//function : IsCollision
//purpose : * 碰撞检测//
//=======================================================================
void RLConvertAPI::IsCollision()
{
if (rl::sg::SimpleScene* simpleScene = dynamic_cast<rl::sg::SimpleScene*>(aReaderAPI->CollisionScene.get()))//简单场景--碰撞场景//
{
bool collision = false; //默认不碰撞//
size_t index=0;
//遍历碰撞场景的 A/B 集合
for(std::size_t i=1;i<aReaderAPI->CollisionScene->getModel(0)->getNumBodies();++i)//body0和参考面接触,collision恒为true
{
for(std::size_t j=0;j<aReaderAPI->CollisionScene->getModel(1)->getNumBodies();++j)
{
collision = simpleScene->areColliding(aReaderAPI->CollisionScene->getModel(0)->getBody(i),
aReaderAPI->CollisionScene->getModel(1)->getBody(j));//判断碰撞//
if(collision)//如果碰撞//
{
index = i;//获得碰撞的关节索引//
emit JointCollision(index);//发送关节碰撞信号 参数-关节索引//
return;
}
}
}
//self check 机器人自碰撞检测//
bool selfCollision = false;
size_t aIndex=0,bIndex=0;
// 判断机械臂的 两两连杆是否碰撞//
for(std::size_t m=0;m<aReaderAPI->CollisionScene->getModel(0)->getNumBodies();++m)
{
for(std::size_t n=aReaderAPI->CollisionScene->getModel(0)->getNumBodies()-1;n>m;--n)
{
selfCollision = simpleScene->areColliding(aReaderAPI->CollisionScene->getModel(0)->getBody(m),
aReaderAPI->CollisionScene->getModel(0)->getBody(n));
if(selfCollision)
{
if(n-m==1)
continue;
aIndex=m;
bIndex=n;
emit SelfCollision(aIndex,bIndex);//自碰撞信号//
return;
}
}
}
emit NoCollision();//无碰撞//
}
}
//=======================================================================
//function : GetJointPosition
//purpose : * 获取关节位置//
//=======================================================================
rl::math::Vector RLConvertAPI::GetJointPosition()
{
rl::math::Vector currentPos = aReaderAPI->JointModel->getPosition();//从关节模型获取当前关节位置//
return currentPos;
}
//=======================================================================
//function : GetOperationalPosition
//purpose : * 获取tcp位姿//
//=======================================================================
QList<double> RLConvertAPI::GetOperationalPosition()
{
QList<double> pos;
rl::math::Transform Tr = aReaderAPI->JointModel->getOperationalPosition(0);
rl::math::Vector3 OR = Tr.rotation().eulerAngles(2, 1, 0).reverse();//欧拉角 ZYX//
pos.append(Tr.translation()(0));
pos.append(Tr.translation()(1));
pos.append(Tr.translation()(2));
pos.append(OR(0)* rl::math::constants::rad2deg);
pos.append(OR(1)* rl::math::constants::rad2deg);
pos.append(OR(2)* rl::math::constants::rad2deg);
return pos;
}
//=======================================================================
//function : GetJointVelocity
//purpose : * 获取关节速度矢量//
//=======================================================================
QList<double> RLConvertAPI::GetJointVelocity()
{
QList<double> speed;
rl::math::Vector s = aReaderAPI->JointModel->getVelocity();//从关节模型获取关节速度矢量//
for (int i=0;i<s.size();++i)
{
speed.append(s[i]);
}
return speed;
}
//=======================================================================
//function : GetJointAcceleration
//purpose : * 获取关节加速度矢量//
//=======================================================================
QList<double> RLConvertAPI::GetJointAcceleration()
{
QList<double> Acceleration;
rl::math::Vector a = aReaderAPI->JointModel->getAcceleration();
for (int i=0;i<a.size();++i)
{
Acceleration.append(a[i]);
}
return Acceleration;
} OCC部件:
#include "occWidget.h"
//构造函数//
OCCWidget::OCCWidget(QWidget *parent) :QWidget(parent)
{
if (m_context.IsNull())//交互上下文为空//
{
Handle(Aspect_DisplayConnection) m_display_donnection = new Aspect_DisplayConnection();//显示连接//
if (m_graphicDriver.IsNull())//图形驱动器为空//
{
m_graphicDriver = new OpenGl_GraphicDriver(m_display_donnection);//初始化opengl图形驱动器//
}
WId window_handle = winId();//窗口句柄//
Handle(WNT_Window) wind = new WNT_Window((Aspect_Handle) window_handle);
m_viewer = new V3d_Viewer(m_graphicDriver);//观察者 查看器//
m_view = m_viewer->CreateView();//查看器创建视图//
m_view->SetWindow(wind);//设置视图的窗口为 OCCWidget的窗口//
if (!wind->IsMapped())
{
wind->Map();
}
m_context = new AIS_InteractiveContext(m_viewer);//获取查看器 (观察者)的交互上下文//
m_viewer->SetDefaultLights();//设置查看器的默认光照//
m_viewer->SetLightOn();//开启查看器光照//
//设置视图//
m_view->ChangeRenderingParams().Method = Graphic3d_RM_RASTERIZATION;//改变渲染参数的方法:Graphic3d_RM_RASTERIZATION//
m_view->ChangeRenderingParams().IsAntialiasingEnabled = Standard_False;//是否启用了反锯齿:false
m_view->SetBgGradientColors(Quantity_NOC_GRAY80,Quantity_NOC_WHITESMOKE,Aspect_GFM_VER);//设置背景梯度颜色//
m_view->MustBeResized();//视图必须可改变尺寸//
m_context->SetDisplayMode(AIS_Shaded, Standard_True);//设置上下文显示模式 AIS_Shaded //
}
setAttribute(Qt::WA_PaintOnScreen);//在屏幕绘制//
setAttribute(Qt::WA_NoSystemBackground);//无系统背景//
setBackgroundRole( QPalette::NoRole );//设置颜色角色//
setFocusPolicy( Qt::StrongFocus );//强聚焦策略//
setMouseTracking(true);//鼠标跟踪//
//上下文风格颜色设置//
m_context->HighlightStyle()->SetColor(Quantity_NOC_CYAN1);//上下文高亮颜色//
m_context->SelectionStyle()->SetColor(Quantity_NOC_CYAN1);//上下文选中风格-颜色//
m_context->HighlightStyle(Prs3d_TypeOfHighlight_LocalDynamic)->SetColor(Quantity_NOC_CYAN1);
m_context->HighlightStyle(Prs3d_TypeOfHighlight_LocalSelected)->SetColor(Quantity_NOC_CYAN1);
//显示模式 透明度设置//
m_context->HighlightStyle()->SetDisplayMode(1);
m_context->SelectionStyle()->SetDisplayMode(1);
m_context->SelectionStyle()->SetTransparency(0.2f);
m_context->HighlightStyle()->SetTransparency(0.2f);
//主选择器-拣选最近:false//
m_context->MainSelector()->SetPickClosest(Standard_False);
//框选橡皮筋:初始化矩形//
m_rubberBand = new QRubberBand(QRubberBand::Rectangle,this);
m_rubberBand->setStyle(QStyleFactory::create("windows"));//框选风格//
//操作器设置//
m_manipulator = new AIS_Manipulator();//初始化AIS操作器//
m_manipulator->SetPart (0, AIS_MM_Scaling, Standard_True);//设置缩放//
m_manipulator->SetPart (1, AIS_MM_Rotation, Standard_True);//设置旋转//
m_manipulator->SetPart (2, AIS_MM_Translation, Standard_True);//设置平移//
m_manipulator->EnableMode (AIS_MM_Translation);//启用平移//
m_manipulator->EnableMode (AIS_MM_Rotation);//启用旋转//
m_manipulator->EnableMode (AIS_MM_Scaling);//启用缩放//
//创建cube//
Handle(AIS_ViewCube) aCube = new AIS_ViewCube();
aCube->SetAutoStartAnimation(Standard_True);//自动开启动画//
aCube->SetSize(60);//设置cube尺寸//
aCube->SetFontHeight(13);//字体高度13//
m_context->Display(aCube,Standard_False);//上下文显示cube//
}
//绘制事件//
void OCCWidget::paintEvent(QPaintEvent *)
{
m_view->Redraw();//重绘视图//
}
//缩放视图//
void OCCWidget::resizeEvent(QResizeEvent *)
{
if( !m_view.IsNull() )
{
m_view->MustBeResized();
}
}
//鼠标按下事件//
void OCCWidget::mousePressEvent(QMouseEvent *event)
{
if(event->button()==Qt::RightButton)//右键//
{
m_view->StartRotation(event->x(),event->y());//视图旋转//
}
else if(event->button()==Qt::LeftButton)//左键//
{
m_context->MoveTo(event->pos().x(),event->pos().y(),m_view,Standard_True);//上下文移动到单击点//
startPnt = event->pos();//起点//
if(!m_manipulator->IsAttached())//操作器未附加//
m_rubberBand->setGeometry(QRect(startPnt,QSize(1,1)));//框选1像素区域//
else
m_manipulator->StartTransform(event->pos().x(),event->pos().y(),m_view);//平移操作器//
}
else if(event->button() == Qt::MidButton)//中键//
{ //记录中键位置//
midBtn_x=event->x();
midBtn_y=event->y();
}
}
//鼠标释放//
void OCCWidget::mouseReleaseEvent(QMouseEvent *event)
{
unsetCursor();
m_context->MoveTo(event->pos().x(),event->pos().y(),m_view,Standard_True); //上下文移动//
if(event->button()==Qt::LeftButton)//左键//
{
if(!m_rubberBand->isHidden()&&!m_manipulator->IsAttached())//框选未隐藏或者操作器未附加//
m_rubberBand->hide();//隐藏框选器//
if(m_manipulator->IsAttached())//操作器附加,停止平移//
m_manipulator->StopTransform();
if(event->pos()==startPnt)//释放位置在起点//
{
AIS_StatusOfPick t_pick_status = AIS_SOP_NothingSelected;//啥都没选中//
if(qApp->keyboardModifiers()==Qt::ControlModifier)//ctrl按键//
{
t_pick_status = m_context->ShiftSelect(true);// 多选 //
}
else
{
t_pick_status = m_context->Select(true); //选中//
}
if(t_pick_status == AIS_SOP_OneSelected || t_pick_status == AIS_SOP_SeveralSelected)//单选或者多选//
{
emit selectShapeChanged(m_context->SelectedShape());//发送选择形状改变信号:参数-选择的形状//
m_context-> InitSelected();//初始化选择//
}
emit pickPixel(event->x(),event->y());//发送拣选像素信号:参数 位置x,y//
}
else//
{
m_context->Select(startPnt.x(),startPnt.y(),event->x(),event->y(),m_view,Standard_True);//选择区域//
m_context-> InitSelected();
}
}
}
//鼠标移动事件//
void OCCWidget::mouseMoveEvent(QMouseEvent *event)
{
if(event->buttons()&Qt::RightButton)//右键//
{
setCursor(Qt::ClosedHandCursor);//设置鼠标形状//
m_view->Rotation(event->x(),event->y());//视图旋转//
}
else if(event->buttons()&Qt::MidButton)//中键//
{
setCursor(Qt::SizeAllCursor);//
m_view->Pan(event->pos().x()-midBtn_x,midBtn_y-event->pos().y());//zoom//
midBtn_x=event->x();//更新中键位置//
midBtn_y=event->y();
}
else if(event->buttons()&Qt::LeftButton)//左键移动//
{
if(!m_manipulator->IsAttached())//操作器未附加//
{
m_rubberBand->show();//框选//
m_rubberBand->setGeometry(QRect(startPnt,event->pos()).normalized());
}
else//移动操作器//
{
m_manipulator->Transform(event->pos().x(),event->pos().y(),m_view);
m_view->Redraw();
}
}
else//未按下移动//
{
m_context->MoveTo(event->pos().x(),event->pos().y(),m_view,Standard_True);
}
}
//滚轮事件zoom//
void OCCWidget::wheelEvent(QWheelEvent *event)
{
m_view->StartZoomAtPoint(event->pos().x(),event->pos().y());
m_view->ZoomAtPoint(0, 0, event->angleDelta().y(), 0);
}
//绘制引擎//
QPaintEngine *OCCWidget::paintEngine() const
{
return nullptr;
}规划线程:
#include "RLAPI_PlanThread.h"
#include <QDebug>
bool RLAPI_PlanThread::PlannerSolved = false;
//=======================================================================
//function : RLAPI_PlanThread
//purpose : * 规划线程构造函数
//=======================================================================
RLAPI_PlanThread::RLAPI_PlanThread(const rl::mdl::Dynamic &aDynamic, rl::sg::pqp::Scene &aScene, const double &minModelSize,
QObject *parent) : QThread(parent),minMdlSize(minModelSize)
{
mDynamic = new rl::mdl::Dynamic(aDynamic);//动态对象
mPlanScene = &aScene;//指向主线程中的场景point to the scene in the main thread
}
//=======================================================================
//function : RLAPI_PlanThread
//purpose : * 规划线程析构函数//
//=======================================================================
RLAPI_PlanThread::~RLAPI_PlanThread()
{
delete mDynamic;
mDynamic = nullptr;
mPlanScene = nullptr;//if delete here, pointer in the main thread will be held on
}
//=======================================================================
//function : GetComputeArguments
//purpose : * 获取计算参数 设置起点和终点//
//=======================================================================
void RLAPI_PlanThread::GetComputeArguments(const rl::math::Vector &startPnt, const rl::math::Vector &endPnt)
{
mStartPnt = startPnt;
mEndPnt = endPnt;
}
//=======================================================================
//function : pause
//purpose : * 暂停线程//
//=======================================================================
void RLAPI_PlanThread::pause()
{
if(isRunning())
doCollisionWait = true;//碰撞等待=true//
}
//=======================================================================
//function : resume
//purpose : * 恢复线程//
//=======================================================================
void RLAPI_PlanThread::resume()
{
if(isRunning())
{
doCollisionWait = false;//碰撞等待=false//
waitCondition.wakeAll();
}
}
//=======================================================================
//function : run
//purpose : * 路径规划 并发送准备更新关节位置信号// https://www.roboticslibrary.org/tutorials/
//=======================================================================
void RLAPI_PlanThread::run()
{
rl::plan::SimpleModel *mPlanModel = new rl::plan::SimpleModel();//新建规划模型-简单模型//
rl::plan::AdvancedOptimizer *mPathOptimizer = new rl::plan::AdvancedOptimizer;//高级优化器//
rl::plan::GnatNearestNeighbors nearestNeighbors(mPlanModel);//获取最近邻//
rl::plan::Prm planner;//规划器//http://doc.roboticslibrary.org/0.7.0/d7/d24/classrl_1_1plan_1_1_prm.html
rl::plan::UniformSampler sampler;//采样器//
rl::plan::RecursiveVerifier verifier;//递归的验证器//
mPlanModel->mdl = mDynamic;//设置规划模型的 mdl//
mPlanModel->model = mPlanScene->getModel(0);//设置规划模型的运动学模型//
mPlanModel->scene = mPlanScene;//设置规划模型的场景//
verifier.delta = 10.0f * rl::math::constants::deg2rad;//验证器 增量10度//
verifier.model = mPlanModel;//验证器的模型:规划模型//
mPathOptimizer->model = mPlanModel;//路径优化器的模型--规划模型//
mPathOptimizer->verifier = &verifier;//路径优化器的 验证器//
mPathOptimizer->ratio = 0.01;//
mPathOptimizer->length = 0.2*minMdlSize;
sampler.model = mPlanModel;//采样器的模型-规划模型//
planner.start = &mStartPnt;//规划器起点关节配置//
planner.goal = &mEndPnt;//规划器终点关节配置//
planner.model = mPlanModel;//规划器的模型-规划模型//
planner.verifier = &verifier;//规划器的验证器//
planner.setNearestNeighbors(&nearestNeighbors);//设置规划器的最近邻//
planner.sampler = &sampler;//设置规划器的采样器//
//verify the start and the goal.if there is an invalid value ,thread will be crashed
//验证开始和目标。如果有一个无效的值,线程将崩溃//
if(!planner.verify())
{
emit ComputeFailed(ComputeError::InvalidConfig);//计算失败//
return;
}
PlannerSolved = false;
QTimer aComputeTimer;//计算超时定时器//
aComputeTimer.singleShot(8000,this,[=](){
if(!PlannerSolved)//检查未求解//
emit ComputeTimeOut();//发送超时信号//
return;
});
QElapsedTimer aElapsedTimer;
aElapsedTimer.start();//计算时间定时器//
PlannerSolved = planner.solve();//求解//
if(PlannerSolved)//找到解//
{
emit ComputeSuccess(aElapsedTimer.elapsed());//计算成功//
rl::plan::VectorList solvedPath = planner.getPath();//获取求解的路径//
verifier.delta *= 2;
mPathOptimizer->process(solvedPath);//优化求解路径//
qDebug()<<"compute+optimize "<<aElapsedTimer.elapsed();//输出计算时间//
rl::math::Vector tmpPos(mPlanModel->getDofPosition());//获取tcp位姿参数//
rl::plan::VectorList::iterator i = solvedPath.begin();
rl::plan::VectorList::iterator j = ++solvedPath.begin();
//路径插值//
//1、添加起点 add the start
if (i != solvedPath.end() && j != solvedPath.end())//遍历求解的优化路径//
{
emit ReadyToSetJointValue(*i);//发送准备设置关节位置信号//
QThread::usleep(50000);//等待50ms//
}
rl::math::Real delta = 10.0f;
double pathLength = 0;
//2、插值 add the interpolations until the goal
for (; i != solvedPath.end() && j != solvedPath.end(); ++i, ++j)
{
pathLength += mPlanModel->distance(*i ,*j);//计算路径段距离//
rl::math::Real stepLength = std::ceil(mPlanModel->distance(*i, *j) / delta); //插值步数//
for (std::size_t k = 1; k < stepLength + 1; ++k)
{
if(doCollisionWait)//碰撞等待
{
aMutex.lock();
waitCondition.wait(&aMutex);//等待条件满足//
aMutex.unlock();
}
mPlanModel->interpolate(*i, *j, k/stepLength, tmpPos);//插值tmpPos//
emit ReadyToSetJointValue(tmpPos);//发送准备设置关节位置信号//
QThread::usleep(50000);//等待50ms//
}
}
PlannerSolved = false;//恢复为未找到解状态//
emit ComputeOver(pathLength);//计算完毕//
}
else//没找到解//
{
emit ComputeFailed(ComputeError::ArgumentError);
return;
}
delete mPlanModel;
delete mPathOptimizer;
}The End

















 7811
7811

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









