



本图由claude生成
本图由claude生成

本图由claude生成
Gemini Deep Research

Gemini 2.5 Pro
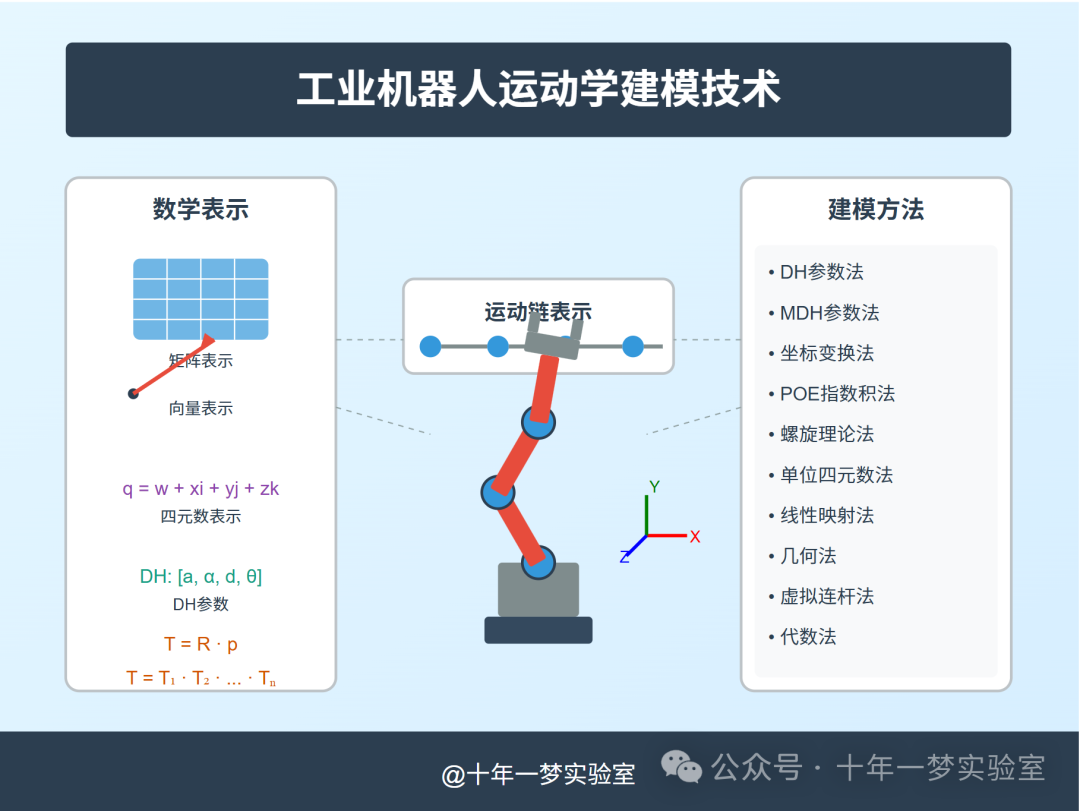
工业机器人运动学建模是机器人学中的基础内容,主要目的是描述机器人各关节变量与末端执行器位姿(位置和姿态)之间的关系。主要包括正运动学和逆运动学两部分。
以下是几种常见的工业机器人运动学建模方法:
Denavit-Hartenberg (D-H) 参数法:
- 标准 D-H (Standard D-H):
将坐标系固连在连杆的末端。
- 改进 D-H (Modified D-H, MDH):
将坐标系固连在连杆的始端。两者在参数定义和坐标系建立上略有不同,但都能达到目的。MDH 在某些情况下能更好地处理树状结构或平行轴关节。
- 原理:
这是最经典和广泛使用的方法。它通过为每个连杆建立一个固连坐标系,并使用四个参数(连杆长度 ai−1、连杆扭角 αi−1、连杆偏距 di、关节角 θi)来描述相邻两个连杆坐标系之间的几何关系。通过连乘各个关节的变换矩阵,可以得到末端执行器相对于基座的齐次变换矩阵,从而完成正运动学建模。
- 分类:
- 优点:
系统性强,参数化简洁,便于计算机编程实现。
- 缺点:
对于某些非串联结构或存在平行关节轴的机器人,D-H参数的选取可能不唯一或存在奇异性问题;物理意义有时不够直观。
旋量理论 (Screw Theory) / 指数积 (Product of Exponentials, PoE) 公式法:
- 原理:
该方法基于 Chasles 定理,即任何刚体运动都可以表示为绕空间中某一直线(旋量轴)的旋转和平移的复合运动(即螺旋运动)。它使用旋量(Screw)来描述每个关节的运动,然后通过指数映射将关节速度(或位移)映射为齐次变换矩阵。整个机器人的正运动学可以通过连乘各个关节运动的指数映射矩阵(即指数积公式)来得到。
- 优点:
几何意义清晰直观,不依赖于为每个连杆建立中间坐标系,避免了 D-H 法中坐标系建立的困难和参数奇异性问题,对于开环、闭环、并联等各种结构的机器人都适用,数学表达更优雅统一。
- 缺点:
相对于 D-H 法,数学上可能更抽象一些,初学者理解起来可能有一定难度。
- 原理:
几何法 (Geometric Approach):
- 原理:
对于结构相对简单的机器人(如平面机器人、SCARA 机器人、球关节手腕等),可以直接利用基本的几何学和三角学知识(如向量、坐标变换、三角函数、余弦定理等)来推导末端执行器的位姿与关节变量之间的关系。
- 优点:
对于简单结构非常直观、易于理解和求解,特别是对于逆运动学求解。
- 缺点:
缺乏系统性和通用性,难以应用于复杂结构(高自由度、非特定结构)的机器人,推导过程可能比较繁琐。
- 原理:
对偶四元数法 (Dual Quaternion Approach):
- 原理:
使用对偶数和四元数的结合——对偶四元数来统一表示刚体的旋转和平移。一个对偶四元数可以紧凑地表示一个齐次变换矩阵。机器人运动学可以通过对偶四元数的运算来描述。
- 优点:
表达紧凑,计算效率较高,可以避免欧拉角等表示姿态时可能出现的万向锁问题,旋转和平移的耦合表示更自然。
- 缺点:
数学概念相对抽象,不如 D-H 法普及。
总结:
- D-H 参数法
是工业界和学术界最常用的传统方法,适用于大多数串联机器人。
- 旋量理论 (PoE)
是一个更现代、更通用的方法,几何意义强,特别适合处理复杂结构和进行更深入的动力学分析。
- 几何法
适用于结构简单的特定机器人,便于直观理解和求解。
- 对偶四元数法
在计算效率和表达紧凑性方面有优势,是一种较新的研究方向。
在实际应用中,选择哪种方法取决于机器人的具体结构、分析的目的(正/逆运动学、速度/加速度分析、动力学分析等)以及工程师的熟悉程度。
- 原理:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









